Animal Locomotion for Animators Stuart S
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Foot and Ankle Motion Analysis Using Dynamic Radiographic Imaging Benjamin Donald Mchenry Marquette University
Marquette University e-Publications@Marquette Dissertations (2009 -) Dissertations, Theses, and Professional Projects Foot and Ankle Motion Analysis Using Dynamic Radiographic Imaging Benjamin Donald McHenry Marquette University Recommended Citation McHenry, Benjamin Donald, "Foot and Ankle Motion Analysis Using Dynamic Radiographic Imaging" (2013). Dissertations (2009 -). Paper 276. http://epublications.marquette.edu/dissertations_mu/276 FOOT AND ANKLE MOTION ANALYSIS USING DYNAMIC RADIOGRAPHIC IMAGING by Benjamin D. McHenry, B.S. A Dissertation submitted to the Faculty of the Graduate School, Marquette University, in Partial Fulfillment of the Requirements for the Degree of Doctor of Philosophy Milwaukee, Wisconsin May 2013 ABSTRACT FOOT AND ANKLE MOTION ANALYSIS USING DYNAMIC RADIOGRAPHIC IMAGING Benjamin D. McHenry, B.S. Marquette University, 2013 Lower extremity motion analysis has become a powerful tool used to assess the dynamics of both normal and pathologic gait in a variety of clinical and research settings. Early rigid representations of the foot have recently been replaced with multi-segmental models capable of estimating intra-foot motion. Current models using externally placed markers on the surface of the skin are easily implemented, but suffer from errors associated with soft tissue artifact, marker placement repeatability, and rigid segment assumptions. Models using intra-cortical bone pins circumvent these errors, but their invasive nature has limited their application to research only. Radiographic models reporting gait kinematics currently analyze progressive static foot positions and do not include dynamics. The goal of this study was to determine the feasibility of using fluoroscopy to measure in vivo intra-foot dynamics of the hindfoot during the stance phase of gait. The developed fluoroscopic system was synchronized to a standard motion analysis system which included a multi-axis force platform. -

Fish Locomotion: Recent Advances and New Directions
MA07CH22-Lauder ARI 6 November 2014 13:40 Fish Locomotion: Recent Advances and New Directions George V. Lauder Museum of Comparative Zoology, Harvard University, Cambridge, Massachusetts 02138; email: [email protected] Annu. Rev. Mar. Sci. 2015. 7:521–45 Keywords First published online as a Review in Advance on swimming, kinematics, hydrodynamics, robotics September 19, 2014 The Annual Review of Marine Science is online at Abstract marine.annualreviews.org Access provided by Harvard University on 01/07/15. For personal use only. Research on fish locomotion has expanded greatly in recent years as new This article’s doi: approaches have been brought to bear on a classical field of study. Detailed Annu. Rev. Marine. Sci. 2015.7:521-545. Downloaded from www.annualreviews.org 10.1146/annurev-marine-010814-015614 analyses of patterns of body and fin motion and the effects of these move- Copyright c 2015 by Annual Reviews. ments on water flow patterns have helped scientists understand the causes All rights reserved and effects of hydrodynamic patterns produced by swimming fish. Recent developments include the study of the center-of-mass motion of swimming fish and the use of volumetric imaging systems that allow three-dimensional instantaneous snapshots of wake flow patterns. The large numbers of swim- ming fish in the oceans and the vorticity present in fin and body wakes sup- port the hypothesis that fish contribute significantly to the mixing of ocean waters. New developments in fish robotics have enhanced understanding of the physical principles underlying aquatic propulsion and allowed intriguing biological features, such as the structure of shark skin, to be studied in detail. -

Locomotor Training with Partial Body Weight Support in Spinal Cord Injury Rehabilitation: Literature Review
doi: ISSN 0103-5150 Fisioter. Mov., Curitiba, v. 26, n. 4, p.página 907-920, set./dez. 2013 Licenciado sob uma Licença Creative Commons [T] Treino locomotor com suporte parcial de peso corporal na reabilitação da lesão medular: revisão da literatura [I] Locomotor training with partial body weight support in spinal cord injury rehabilitation: literature review [A] Cristina Maria Rocha Dutra[a], Cynthia Maria Rocha Dutra[b], Auristela Duarte de Lima Moser[c], Elisangela Ferretti Manffra[c] [a] Mestranda do Programa de Pós-Graduação em Tecnologia em Saúde da Pontiícia Universidade Católica do Paraná (PUCPR), Curitiba, PR - Brasil, e-mail: [email protected] [b] Professora mestre da Universidade Tuiuti do PR - Curitiba, Paraná, Brasil, e-mail: [email protected] [c] Professoras doutoras do Programa de Pós-Graduação em Tecnologia em Saúde da Pontiícia Universidade Católica do Paraná, Curitiba, P - Brasil, e-mails: [email protected], [email protected] [R] Resumo Introdução: O treino locomotor com suporte de peso corporal (TLSP) é utilizado há aproximadamente 20 anos no campo da reabilitação em pacientes que sofrem de patologias neurológicas. O TLSP favorece melhoras osteomusculares, cardiovasculares e psicológicas, pois desenvolve ao máximo o potencial residual do orga- nismo, proporcionando a reintegração na convivência familiar, proissional e social. Objetivo: Identiicar as principais modalidades de TLSP e seus parâmetros de avaliação com a inalidade de contribuir com o esta- belecimento de evidências coniáveis para as práticas reabilitativas de pessoas com lesão medular. Materiais e métodos: Foram analisados artigos originais, publicados entre 2000 e 2011, que envolvessem treino de marcha após a lesão medular, com ou sem suporte parcial de peso corporal, e tecnologias na assistência do treino, como biofeedback e estimulação elétrica funcional, entre outras. -

Multi-Segment Foot Models and Their Use in Clinical Populations
Gait & Posture 69 (2019) 50–59 Contents lists available at ScienceDirect Gait & Posture journal homepage: www.elsevier.com/locate/gaitpost Review Multi-segment foot models and their use in clinical populations T ⁎ Alberto Leardinia,1, Paolo Caravaggia, ,1, Tim Theologisb,2, Julie Stebbinsb,2 a Movement Analysis Laboratory, IRCCS Istituto Ortopedico Rizzoli, Bologna, Italy b Oxford Gait Laboratory, Nuffield Orthopaedic Centre, Oxford, UK ARTICLE INFO ABSTRACT Keywords: Background: Many multi-segment foot models based on skin-markers have been proposed for in-vivo kinematic Foot joints analysis of foot joints. It remains unclear whether these models have developed far enough to be useful in clinical Kinematics populations. The present paper aims at reviewing these models, by discussing major methodological issues, and Multisegment foot models analyzing relevant clinical applications. Clinical gait analysis Research question: Can multi-segment foot models be used in clinical populations? Foot pathologies Methods: Pubmed and Google Scholar were used as the main search engines to perform an extensive literature search of papers reporting definition, validation or application studies of multi-segment foot models. The search keywords were the following: ‘multisegment’; ‘foot’; ‘model’; ‘kinematics’, ‘joints’ and ‘gait’. Results: More than 100 papers published between 1991 and 2018 were identified and included in the review. These studies either described a technique or reported a clinical application of one of nearly 40 models which differed according to the number of segments, bony landmarks, marker set, definition of anatomical frames, and convention for calculation of joint rotations. Only a few of these models have undergone robust validation studies. Clinical application papers divided by type of assessment revealed that the large majority of studies were a cross-sectional comparison of a pathological group to a control population. -

Compression Garments for Leg Lymphoedema
Compression garments for leg lymphoedema You have been fitted with a compression garment to help reduce the lymphoedema in your leg. Compression stockings work by limiting the amount of fluid building up in your leg. They provide firm support, enabling the muscles to pump fluid away more effectively. They provide most pressure at the foot and less at the top of the leg so fluid is pushed out of the limb where it will drain away more easily. How do I wear it? • Wear your garment every day to control the swelling in your leg. • Put your garment on as soon as possible after getting up in the morning. This is because as soon as you stand up and start to move around extra fluid goes into your leg and it begins to swell. • Take the garment off before bedtime unless otherwise instructed by your therapist. We appreciate that in hot weather garments can be uncomfortable, but unfortunately this is when it is important to wear it as the heat can increase the swelling. If you would like to leave off your garment for a special occasion please ask the clinic for advice. What should I look out for? Your garment should feel firm but not uncomfortable: • If you notice the garment is rubbing or cutting in, adjust the garment or remove it and reapply it. • If your garment feels tight during the day, try and think about what may have caused this. If you have been busy, sit down and elevate your leg and rest for at least 30 minutes. -

Rethinking the Evolution of the Human Foot: Insights from Experimental Research Nicholas B
© 2018. Published by The Company of Biologists Ltd | Journal of Experimental Biology (2018) 221, jeb174425. doi:10.1242/jeb.174425 REVIEW Rethinking the evolution of the human foot: insights from experimental research Nicholas B. Holowka* and Daniel E. Lieberman* ABSTRACT presumably owing to their lack of arches and mobile midfoot joints Adaptive explanations for modern human foot anatomy have long for enhanced prehensility in arboreal locomotion (see Glossary; fascinated evolutionary biologists because of the dramatic differences Fig. 1B) (DeSilva, 2010; Elftman and Manter, 1935a). Other studies between our feet and those of our closest living relatives, the great have documented how great apes use their long toes, opposable apes. Morphological features, including hallucal opposability, toe halluces and mobile ankles for grasping arboreal supports (DeSilva, length and the longitudinal arch, have traditionally been used to 2009; Holowka et al., 2017a; Morton, 1924). These observations dichotomize human and great ape feet as being adapted for bipedal underlie what has become a consensus model of human foot walking and arboreal locomotion, respectively. However, recent evolution: that selection for bipedal walking came at the expense of biomechanical models of human foot function and experimental arboreal locomotor capabilities, resulting in a dichotomy between investigations of great ape locomotion have undermined this simple human and great ape foot anatomy and function. According to this dichotomy. Here, we review this research, focusing on the way of thinking, anatomical features of the foot characteristic of biomechanics of foot strike, push-off and elastic energy storage in great apes are assumed to represent adaptations for arboreal the foot, and show that humans and great apes share some behavior, and those unique to humans are assumed to be related underappreciated, surprising similarities in foot function, such as to bipedal walking. -

Analyzing Pterosaur Ontogeny and Sexual Dimorphism with Multivariate Allometry Erick Charles Anderson [email protected]
Marshall University Marshall Digital Scholar Theses, Dissertations and Capstones 2016 Analyzing Pterosaur Ontogeny and Sexual Dimorphism with Multivariate Allometry Erick Charles Anderson [email protected] Follow this and additional works at: http://mds.marshall.edu/etd Part of the Animal Sciences Commons, Ecology and Evolutionary Biology Commons, and the Paleontology Commons Recommended Citation Anderson, Erick Charles, "Analyzing Pterosaur Ontogeny and Sexual Dimorphism with Multivariate Allometry" (2016). Theses, Dissertations and Capstones. 1031. http://mds.marshall.edu/etd/1031 This Thesis is brought to you for free and open access by Marshall Digital Scholar. It has been accepted for inclusion in Theses, Dissertations and Capstones by an authorized administrator of Marshall Digital Scholar. For more information, please contact [email protected], [email protected]. ANALYZING PTEROSAUR ONTOGENY AND SEXUAL DIMORPHISM WITH MULTIVARIATE ALLOMETRY A thesis submitted to the Graduate College of Marshall University In partial fulfillment of the requirements for the degree of Master of Science in Biological Sciences by Erick Charles Anderson Approved by Dr. Frank R. O’Keefe, Committee Chairperson Dr. Suzanne Strait Dr. Andy Grass Marshall University May 2016 i ii ii Erick Charles Anderson ALL RIGHTS RESERVED iii Acknowledgments I would like to thank Dr. F. Robin O’Keefe for his guidance and advice during my three years at Marshall University. His past research and experience with reptile evolution made this research possible. I would also like to thank Dr. Andy Grass for his advice during the course of the research. I would like to thank my fellow graduate students Donald Morgan and Tiffany Aeling for their support, encouragement, and advice in the lab and bar during our two years working together. -

Gait Analysis in Prosthetics by James R
Gait Analysis in Prosthetics by James R. Gage, M.D. Ramona Hicks, R.P.T., M.A. REVIEW lems faced by lower limb amputees. Inman's measurement techniques included motion pic Objective measurement systems which quan tures of coronal and sagittal views, as well as tify locomotion have been in use for the past transverse rotations from below using a glass century. But not until World War II, when walkway. Using interrupted light photography, thousands of men returned home to the United the Biomechanics Laboratory team studied the States with amputations, was technology really motion of body segments during gait. Force applied to the understanding of prosthetic gait. plates measured the subject's ground reaction Inman and colleagues1 founded the Biome forces, and muscle activity was recorded using chanics Laboratory at the University of Cali electromyography (EMG), which measures the fornia to establish fundamental principles of electrical signals associated with contraction of human walking, particularly in relation to prob a muscle. Prior to Inman's fundamental studies, prostheses were customized for the individual Temporal and kinematic data, which were col amputee, without any particular regard to ra lected at slow, free, and fast speeds, showed tional structural design. Inman's goal was to that the hydraulic knees improved the symmetry provide fundamental data essential for the de between the prosthetic limb and the sound limb, sign of prosthetic limbs. By analyzing normal especially at the fast and free speeds. This human walking, he and his colleagues laid the finding was true for both cadence and the groundwork for biomechanical analysis of am amount of knee-flexion at swing phase. -

Sports Ankle Injuries Assessment and Management
FOCUS Sports injuries Sports ankle injuries Drew Slimmon Peter Brukner Assessment and management Background Case study Lucia is a female, 16 years of age, who plays netball with the Sports ankle injuries present commonly in the general state under 17s netball team. She presents with an ankle injury practice setting. The majority of these injuries are inversion sustained at training the previous night. She is on crutches and plantar flexion injuries that result in damage to the and is nonweight bearing. Examination raises the possibility of lateral ligament complex. a fracture, but X-ray is negative. You diagnose a severe lateral Objective ligament sprain and manage Lucia with ice, a compression The aim of this article is to review the assessment and bandage and a backslab initially. She then progresses through management of sports ankle injuries in the general practice a 6 week rehabilitation program and you recommend she wear setting. an ankle brace for at least 6 months. Discussion Assessment of an ankle injury begins with a detailed history to determine the severity, mechanism and velocity of the injury, what happened immediately after and whether there is a past history of inadequately rehabilitated ankle injury. Examination involves assessment of weight bearing, inspection, palpation, movement, and application of special examination tests. Plain X-rays may be helpful to exclude a fracture. If the diagnosis is uncertain, consider second The majority of ankle injuries are inversion and plantar line investigations including bone scan, computerised flexion injuries that result in damage to the lateral tomography or magnetic resonance imaging, and referral to a ligament complex (Figure 1). -

Running Birds from Quail to Ostrich Prioritise Leg Safety and Economy
© 2014. Published by The Company of Biologists Ltd | The Journal of Experimental Biology (2014) 217, 3786-3796 doi:10.1242/jeb.102640 RESEARCH ARTICLE Don’t break a leg: running birds from quail to ostrich prioritise leg safety and economy on uneven terrain Aleksandra V. Birn-Jeffery1,*,‡, Christian M. Hubicki2,‡, Yvonne Blum1, Daniel Renjewski2, Jonathan W. Hurst2 and Monica A. Daley1,§ ABSTRACT Daley, 2012; Dial, 2003; Jindrich et al., 2007; Rubenson et al., Cursorial ground birds are paragons of bipedal running that span a 2004). These athletes span the broadest body mass range among 500-fold mass range from quail to ostrich. Here we investigate the extant bipeds, over 500-fold from quail to ostrich. Birds thus provide task-level control priorities of cursorial birds by analysing how they a natural animal model for understanding the functional demands of negotiate single-step obstacles that create a conflict between body striding bipedalism and how these demands change with body size stability (attenuating deviations in body motion) and consistent leg (Gatesy and Biewener, 1991; Hutchinson and Garcia, 2002; Roberts force–length dynamics (for economy and leg safety). We also test the et al., 1998a). hypothesis that control priorities shift between body stability and leg Here, we ask two questions fundamental to locomotor behaviour: safety with increasing body size, reflecting use of active control to (1) what are the task-level leg control priorities of running animals; overcome size-related challenges. Weight-support demands lead to and (2) how do these priorities vary with terrain and body size? a shift towards straighter legs and stiffer steady gait with increasing Running animals must control their legs to balance numerous, body size, but it remains unknown whether non-steady locomotor sometimes conflicting, task-level demands including minimising priorities diverge with size. -
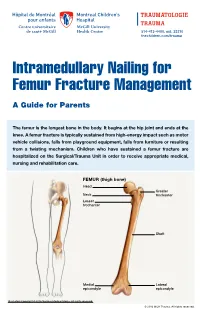
Intramedullary Nailing for Femur Fracture Management a Guide for Parents
514-412-4400, ext. 23310 thechildren.com/trauma Intramedullary Nailing for Femur Fracture Management A Guide for Parents The femur is the longest bone in the body. It begins at the hip joint and ends at the knee. A femur fracture is typically sustained from high-energy impact such as motor vehicle collisions, falls from playground equipment, falls from furniture or resulting from a twisting mechanism. Children who have sustained a femur fracture are hospitalized on the Surgical/Trauma Unit in order to receive appropriate medical, nursing and rehabilitation care. FEMUR (thigh bone) Head Greater Neck trochanter Lesser trochanter Shaft Medial Lateral epicondyle epicondyle Illustration Copyright © 2016 Nucleus Medical Media, All rights reserved. © 2016 MCH Trauma. All rights reserved. FEMUR FRACTURE MANAGEMENT The pediatric Orthopedic Surgeon will assess your child in order to determine the optimal treatment method. Treatment goals include: achieving proper bone realignment, rapid healing, and the return to normal daily activities. The treatment method chosen is primarily based on the child’s age but also taken into consideration are: fracture type, location and other injuries sustained if applicable. Prior to the surgery, your child may be placed in skin traction. This will ensure the bone is in an optimal healing position until it is surgically repaired. Occasionally, traction may be used for a longer period of time. The surgeon will determine if this management is needed based on the specific fracture type and/or location. ELASTIC/FLEXIBLE INTRAMEDULLARY NAILING This surgery is performed by the Orthopedic Surgeon in the Operating Room under general anesthesia. The surgeon will usually make two small incisions near the knee joint in order to insert two flexible titanium rods (intramedullary nails) Flexible through the femur. -

Three Gray Classics on the Biomechanics of Animal Movement
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by Harvard University - DASH Three Gray Classics on the Biomechanics of Animal Movement The Harvard community has made this article openly available. Please share how this access benefits you. Your story matters Citation Lauder, G. V., Eric Tytell. 2004. Three Gray Classics on the Biomechanics of Animal Movement. Journal of Experimental Biology 207, no. 10: 1597–1599. doi:10.1242/jeb.00921. Published Version doi:10.1242/jeb.00921 Citable link http://nrs.harvard.edu/urn-3:HUL.InstRepos:30510313 Terms of Use This article was downloaded from Harvard University’s DASH repository, and is made available under the terms and conditions applicable to Other Posted Material, as set forth at http:// nrs.harvard.edu/urn-3:HUL.InstRepos:dash.current.terms-of- use#LAA JEB Classics 1597 THREE GRAY CLASSICS locomotor kinematics, muscle dynamics, JEB Classics is an occasional ON THE BIOMECHANICS and computational fluid dynamic column, featuring historic analyses of animals moving through publications from The Journal of OF ANIMAL MOVEMENT water. Virtually every recent textbook in Experimental Biology. These the field either reproduces one of Gray’s articles, written by modern experts figures directly or includes illustrations in the field, discuss each classic that derive their inspiration from his paper’s impact on the field of figures (e.g. Alexander, 2003; Biewener, biology and their own work. A 2003). PDF of the original paper accompanies each article, and can be found on the journal’s In his 1933a paper, Gray aimed to website as supplemental data.