The Ucl Ius-Tithonium Chasma Digital Elevation Model
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

1 Orbital Evidence for Clay and Acidic Sulfate Assemblages on Mars Based on 2 Mineralogical Analogs from Rio Tinto, Spain 3 4 Hannah H
1 Orbital Evidence for Clay and Acidic Sulfate Assemblages on Mars Based on 2 Mineralogical Analogs from Rio Tinto, Spain 3 4 Hannah H. Kaplan1*, Ralph E. Milliken1, David Fernández-Remolar2, Ricardo Amils3, 5 Kevin Robertson1, and Andrew H. Knoll4 6 7 Authors: 8 9 1 Department of Earth, Environmental and Planetary Sciences, Brown University, 10 Providence, RI, 02912 USA. 11 12 2British Geological Survey, Nicker Hill, Keyworth, NG12 5GG, UK. 13 14 3 Centro de Astrobiologia (INTA-CSIC), Ctra Ajalvir km 4, Torrejon de Ardoz, 28850, 15 Spain. 16 17 4 Department of Organismic and Evolutionary Biology, Harvard University, 18 Çambridge, MA, USA. 19 20 *Corresponding author: [email protected] 1 21 Abstract 22 23 Outcrops of hydrated minerals are widespread across the surface of Mars, 24 with clay minerals and sulfates being commonly identified phases. Orbitally-based 25 reflectance spectra are often used to classify these hydrated components in terms of 26 a single mineralogy, although most surfaces likely contain multiple minerals that 27 have the potential to record local geochemical conditions and processes. 28 Reflectance spectra for previously identified deposits in Ius and Melas Chasma 29 within the Valles Marineris, Mars, exhibit an enigmatic feature with two distinct 30 absorptions between 2.2 – 2.3 µm. This spectral ‘doublet’ feature is proposed to 31 result from a mixture of hydrated minerals, although the identity of the minerals has 32 remained ambiguous. Here we demonstrate that similar spectral doublet features 33 are observed in airborne, field, and laboratory reflectance spectra of rock and 34 sediment samples from Rio Tinto, Spain. -

NASA Mars Exploration Strategy: “Follow the Water”
Gullies on Mars -- Water or Not? Allan H. Treiman NASA Mars Exploration Strategy: “Follow the Water” Life W Climate A T Geology E Resources R Evidence of Water on Mars Distant Past Crater Degradation and Valley Networks ‘River’ Channels Flat Northern Lowlands Meteorites Carbonate in ALH84001 Clay in nakhlites MER Rover Sites Discoveries Hydrous minerals: jarosite! Fe2O3 from water (blueberries etc.) Silica & sulfate & phosphate deposits Recent Past (Any liquid?) Clouds & Polar Ice Ground Ice Valley Networks and Degraded Craters 1250 km River Channels - Giant Floods! 225 km 10 km craters River Channels - ‘Normal’ Flows 14 km 1 km River Channels from Rain? 700 km Science, July 2, 2004 19 km Ancient Martian Meteorite ALH84001 MER Opportunity - Heatshield and parachute. Jarosite - A Water-bearing Mineral Formed in Groundwater 3+ KFe3 (SO4)2(OH)6 2 Jarosite = K2SO4 + 3 Fe2O3 + 3 H2SO4 Hematite is in “Blueberries,” which still suggest water. Stone Mountain MER Spirit: Columbia Hills H2O Now: Clouds & Polar Caps Ground Ice – Mars Orbiter GRS Water abundances within a few meters depth of the Martian surface. Wm. Feldman. AAAS talk & Los Alamos Nat’l. Lab. Press Release, 15 Feb. 2003. (SPACE.com report, 16 Feb. 2003) So, Water on Mars !! So? Apparently, Mars has/had lots of water. Lots of evidence for ancient liquid water (> ~2 billion years ago), both surface and underground. Martian Gullies - Liquid Water or Not? Material flows down steep slopes, most commonly interpreted as water-bearing debris flows [Malin and Edgett (2000) Science 288, 2330]. Liquid water is difficult to produce and maintain near Mars’ surface, now. -

Episodic and Declining Fluvial Processes in Southwest Melas Chasma, Valles Marineris, Mars
Journal of Geophysical Research: Planets RESEARCH ARTICLE Episodic and Declining Fluvial Processes in Southwest Melas 10.1029/2018JE005710 Chasma, Valles Marineris, Mars Key Points: J. M. Davis1 , P. M. Grindrod1 , P. Fawdon2, R. M. E. Williams3 , S. Gupta4, and M. Balme2 • Episodic fluvial processes occurred in the southwest Melas basin, Valles 1Department of Earth Sciences, Natural History Museum, London, UK, 2School of Physical Sciences, The Open University, Marineris, Mars, likely during the 3 4 Hesperian period Milton Keynes, Buckinghamshire, UK, Planetary Science Institute, Tucson, AZ, USA, Department of Earth Sciences and • Evidence for multiple “wet and dry” Engineering, Imperial College London, London, UK periods is preserved in the fluvial systems and paleolacustrine deposits • Local Valles Marineris climate likely Abstract There is abundant evidence for aqueous processes on Noachian terrains across Mars; however, supported runoff and precipitation key questions remain about whether these processes continued into the Hesperian as the martian and transitioned from perennial to ephemeral conditions climate became less temperate. One region with an extensive Hesperian sedimentary record is Valles Marineris. We use high-resolution image and topographic data sets to investigate the fluvial systems in the Supporting Information: southwest Melas basin, Valles Marineris, Mars. Fluvial landforms in the basin exist across a wide area, and • Supporting Information S1 some are preserved as inverted channels. The stratigraphy of the basin is complex: Fluvial landforms are preserved as planview geomorphic features and are also interbedded with layered deposits in the basin. The Correspondence to: fluvial morphologies are consistent with formation by precipitation-driven runoff. Fluvial processes in the J. M. -

March 21–25, 2016
FORTY-SEVENTH LUNAR AND PLANETARY SCIENCE CONFERENCE PROGRAM OF TECHNICAL SESSIONS MARCH 21–25, 2016 The Woodlands Waterway Marriott Hotel and Convention Center The Woodlands, Texas INSTITUTIONAL SUPPORT Universities Space Research Association Lunar and Planetary Institute National Aeronautics and Space Administration CONFERENCE CO-CHAIRS Stephen Mackwell, Lunar and Planetary Institute Eileen Stansbery, NASA Johnson Space Center PROGRAM COMMITTEE CHAIRS David Draper, NASA Johnson Space Center Walter Kiefer, Lunar and Planetary Institute PROGRAM COMMITTEE P. Doug Archer, NASA Johnson Space Center Nicolas LeCorvec, Lunar and Planetary Institute Katherine Bermingham, University of Maryland Yo Matsubara, Smithsonian Institute Janice Bishop, SETI and NASA Ames Research Center Francis McCubbin, NASA Johnson Space Center Jeremy Boyce, University of California, Los Angeles Andrew Needham, Carnegie Institution of Washington Lisa Danielson, NASA Johnson Space Center Lan-Anh Nguyen, NASA Johnson Space Center Deepak Dhingra, University of Idaho Paul Niles, NASA Johnson Space Center Stephen Elardo, Carnegie Institution of Washington Dorothy Oehler, NASA Johnson Space Center Marc Fries, NASA Johnson Space Center D. Alex Patthoff, Jet Propulsion Laboratory Cyrena Goodrich, Lunar and Planetary Institute Elizabeth Rampe, Aerodyne Industries, Jacobs JETS at John Gruener, NASA Johnson Space Center NASA Johnson Space Center Justin Hagerty, U.S. Geological Survey Carol Raymond, Jet Propulsion Laboratory Lindsay Hays, Jet Propulsion Laboratory Paul Schenk, -

NOCTIS LANDING: a Proposed Landing Site/Exploration Zone For
NOCTIS LANDING: A Proposed Landing Site/Exploration Zone for Human Missions to the Surface of Mars Pascal Lee1,2,3, Shannen Acedillo1,2, Stephen Braham1, Adrian Brown2, Richard Elphic3, Terry Fong3, Brian Glass3, Christopher Hoftun1, Brage W. Johansen1, Kira Lorber1, David Mittlefehldt4, Yuta Tagaki1,2, Peter Thomas5, Mi- chael West1, Stephen West1, Michael Zolensky4. 1Mars Institute, NASA Research Park, Moffett Field, CA 94035, USA, [email protected]. 2SETI Institute, 3NASA Ames Research Center, 4NASAJohnson Space Center, 5Cornell University. Exploration Zone Name: Noctis Landing Landing Site Coordinates: 6o 29’ 38.33” S, 92o 27’ 12.34” W. The proposed Noctis Landing Landing Site/Exploration Zone (LS/EZ) is shown in Figure 1. Our preliminary study suggests that the proposed site meets all key Science and Resources (incl. Civil Engineering) requirements. The site is of significant interest, as the EZ not only offers a large number and wide range of regions of interest (ROIs) for short-term exploration, it is also located strategically at the crossroads between Tharsis and Valles Marineris, which are key for long-term exploration. Figure 1: Map of the Noctis Landing LS/EZ. The solid red circle marks the distance of 100 km radial range from the Landing Site (LS), defining the primary Exploration Zone (EZ). The dotted red circle marks 200 km radial range from the LS. Areas circled (or ellipsed) in blue are high value science targets located within the primary EZ. Areas outlined in yellow are high-value science targets located outside the EZ, but within 200 km radial range from the LS. White dotted lines represent potential paths for pressurized rover traverses. -

An Overview of the Sulfates Detected in the Equatorial Regions by the Omega/Mex Spectrometer
Seventh International Conference on Mars 3141.pdf AN OVERVIEW OF THE SULFATES DETECTED IN THE EQUATORIAL REGIONS BY THE OMEGA/MEX SPECTROMETER. N. Mangold1, A. Gendrin2, C. Quantin 1, J.-P. Bibring2, B. Gondet2, Y. Langevin 2, F. Poulet2, R. Arvidson3, J. L. Griffes3, H. Hauber4, Ph. Masson1, G. Neukum5, and the OMEGA and HRSC Co - Investigator Teams (1) IDES-Orsay, UMR 8148, CNRS and Université Paris -Sud, Bat. 509, 91405 ORSAY Cedex, France, [email protected], (2) IAS, Université Paris-Sud, France (3) DEPS, Washington University, St Louis, MO, USA (4) DLR, Berlin, Germany (5) FU, Berlin, Germany. Introduction: Sulfates are detected with the spectral Sulfates in Terra Meridiani and chaos region: In data OMEGA (Observatoire pour la Minéralogie, the chaos region, Aram Chaos exhibits a large area of L’Eau, Les Glaces et l’Activité) onboard Mars sulfate-rich deposits corresponding to a part of the Express on many areas of the Valles Marineris - Aram Chaos spectacular layered deposits (Fig. 1). Xanthe Terra chaos and Terra Meridiani regions. These sulfates surround, and are locally found They are present uniquely on the light toned layered together, a location with a strong absorption of iron deposits present inside canyons, in chaos and over the oxides. This iron oxide rich region fits the location Meridiani Planum area [1 to 6]. Sulfates require the where TES discovered gray hematite. This leads to a presence of liquid water in their formation. As a similar context than Meridiani Planum, but, here, iron consequence, sulfates in layered deposits have been oxides are present beneath the sulfates as a result of interpreted either as deposition through evaporitic erosion of material and eolian sorting into sand dunes processes or alteration of preexisting material through at the foothill of scarps. -

Origin of Collapsed Pits and Branched Valleys Surrounding the Ius Chasma on Mars
The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Volume XL-8, 2014 ISPRS Technical Commission VIII Symposium, 09 – 12 December 2014, Hyderabad, India Origin of collapsed pits and branched valleys surrounding the Ius chasma on Mars Gasiganti T. Vamshi, Tapas R. Martha and K. Vinod Kumar National Remote Sensing Centre (NRSC), Hyderabad, India - [email protected], (tapas_martha, vinodkumar_k)@nrsc.gov.in ISPRS Technical Commission VIII Symposium KEY WORDS: Valles Marineris, MEX, HRSC ABSTRACT: Chasma is a deep, elongated and steep sided depression on planetary surfaces. Several hypothesis have been proposed regarding the origin of chasma. In this study, we analysed morphological features in north and south of Ius chasma. Collapsed pits and branched valleys alongwith craters are prominent morphological features surrounding Ius Chasma, which forms the western part of the well known Valles Marineris chasma system on Martian surface. Analysis of images from the High Resolution Stereo Camera (HRSC) in ESA’s Mars Express (MEX) with a spatial resolution of 10 m shows linear arrangement of pits north of the Ius chasma. These pits were initially developed along existing narrow linear valleys parallel to Valles Merineris and are conical in shape unlike flat floored impact craters found adjacent to them. The width of conical pits ranges 1-10 km and depth ranges 1-2 km. With more subsidence, size of individual pits increased gradually and finally coalesced together to create a large depression forming a prominent linear valley. Arrangement of pits in this particular fashion can be attributed to collapse of the surface due to large hollows created in the subsurface because of the withdrawal of either magma or dry ice. -
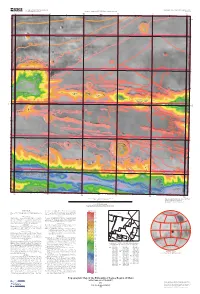
Topographic Map of the Tithonium Chasma Region of Mars
U.S. DEPARTMENT OF THE INTERIOR Prepared for the GEOLOGIC INVESTIGATIONS SERIES I–2806 U.S. GEOLOGICAL SURVEY NATIONAL AERONAUTICS AND SPACE ADMINISTRATION Version 1.0 275°E 276°E 277°E 278°E 85°W 279°E 280°E 84°W 83°W NORTH 82°W 81°W 80°W –2.5° –2.5° Tithoniae 4000 –3° –3° –3° –3° Fossae 4000 3000 –4° –4° –4° –4° 0 –1000 TITHONIUM 4000 2000 3000 1000 1000 –5° –1000 –5° –5° EAST WEST CHASMA –5° 0 4000 3000 Tithoniae 1000 4000 Catenae Tithoniae –6° –6° –6° –6° Fossae 4000 4000 –2000 –3000 –7° –7° –7° –7° 3000 –1000 IUS –4000 –3000 0 1000 CHASMA –3000 Geryon –7.5° Montes –1000 –3000 1000 –1000 –7.5° 85°W 84°W 275°E 276°E 83°W SOUTH 277°E 82°W 278°E 81°W 279°E 80°W 280°E SCALE 1:502 000 (1 mm = 502 m) AT 270° E. (90° W.) LONGITUDE Prepared on behalf of the Planetary Geology and Geophysics Pro- TRANSVERSE MERCATOR PROJECTION gram, Solar System Exploration Division, Office of Space Science, 10 10 20 30 40 6070 80 90 100 National Aeronautics and Space Administration. Manuscript approved for publication August 14, 2003 KILOMETERS CONTOUR INTERVAL 250 METERS Planetocentric latitude and east longitude coordinate system shown in black. Planetographic latitude and west longitude coordinate system shown in red. NOTES ON BASE vation measurements associated with them. This lack of elevation measurements Contour Guide, in meters 65° 65° This map, compiled photogrammetrically from Viking Orbiter stereo image pairs, may result in contour lines that do not adequately represent some features. -

NASA ADS: Stratigraphic Mapping of Hydrated Phases in Western Ius
NASA ADS: Stratigraphic mapping of hydrated phases in Western Ius... http://adsabs.harvard.edu/abs/2013AGUFM.P23F1844C Home Help Sitemap Fulltext Article not available Find Similar Articles Full record info Cull, S.; McGuire, P. C.; Gross, C.; Dumke, A. American Geophysical Union, Fall Meeting 2013, abstract #P23F-1844 Recent mapping with the Compact Reconnaissance Imaging Spectrometer for Mars (CRISM) and Observatoire pour la Minéralogie, l'Eau, les Glaces et l'Activité (OMEGA) has revealed a wide range of hydrated minerals throughout Valles Marineris. Noctis Labyrinthus has interbedded polyhydrated and monohydrated sulfates, with occasional beds of nontronite (Weitz et al. 2010, Thollot et al. 2012). Tithonium Chasma has interbedded poly- and monohydrated sulfates (Murchie et al. 2012); Juventae has poly- and monohydrated sulfates and an anhydrous ferric hydroxysulfate-bearing material (Bishop et al. 2009); and Melas and Eastern Candor contain layers of poly- and monohydrated sulfates (e.g., Roach et al. 2009). Though each chasm displays its own mineralogy, in general, the eastern valles tend to be dominated by layered sequences with sulfates; whereas, the far western valles (Noctis Labyrinthus) has far more mineral phases, possibly due to a wider variety of past environments or processes affecting the area. Ius Chasma, which is situated between Noctis Labyrinthus and the eastern valles and chasmata, also displays a complex mineralogy, with polyhydrated sulfates, Fe/Mg smectites, hydrated silica, and kieserite (e.g. Roach et al. 2010). Here, we present mapping of recently acquired CRISM observations over Ius Chasma, combining the recent CRISM cubes with topographic terrains produced using High Resolution Stereo Camera (HRSC) data from the Mars Express spacecraft. -

Evolution of Major Sedimentary Mounds on Mars: Build-Up Via Anticompensational Stacking Modulated by Climate Change
Evolution of major sedimentary mounds on Mars: build-up via anticompensational stacking modulated by climate change Edwin S. Kite1,*, Jonathan Sneed1, David P. Mayer1, Kevin W. Lewis2, Timothy I. Michaels3, Alicia Hore4, Scot C.R. Rafkin5. 1. University of Chicago. 2. Johns Hopkins University. 3. SETI Institute. 4. Brock University. 5. Southwest Research Institute. (*[email protected]) Abstract. We present a new database of >300 layer-orientations from sedimentary mounds on Mars. These layer orientations, together with draped landslides, and draping of rocks over differentially- eroded paleo-domes, indicate that for the stratigraphically-uppermost ~1 km, the mounds formed by the accretion of draping strata in a mound-shape. The layer-orientation data further suggest that layers lower down in the stratigraphy also formed by the accretion of draping strata in a mound-shape. The data are consistent with terrain-influenced wind erosion, but inconsistent with tilting by flexure, differential compaction over basement, or viscoelastic rebound. We use a simple landscape evolution model to show how the erosion and deposition of mound strata can be modulated by shifts in obliquity. The model is driven by multi-Gyr calculations of Mars’ chaotic obliquity and a parameterization of terrain-influenced wind erosion that is derived from mesoscale modeling. Our results suggest that mound-spanning unconformities with kilometers of relief emerge as the result of chaotic obliquity shifts. Our results support the interpretation that Mars’ rocks record intermittent liquid-water runoff during a 108-yr interval of sedimentary rock emplacement. 1. Introduction. Understanding how sediment accumulated is central to interpreting the Earth’s geologic records (Allen & Allen 2013, Miall 2010). -

Polygonal Impact Craters in Argyre Region, Mars: Implications for Geology and Cratering Mechanics
Meteoritics & Planetary Science 43, Nr 10, 1605–1628 (2008) Abstract available online at http://meteoritics.org Polygonal impact craters in Argyre region, Mars: Implications for geology and cratering mechanics T. ÖHMAN1, 2*, M. AITTOLA2, V.-P. KOSTAMA2, J. RAITALA2, and J. KORTENIEMI2, 3 1Department of Geosciences, Division of Geology, University of Oulu, P.O. Box 3000, FI-90014, Finland 2Department of Physical Sciences, Division of Astronomy, University of Oulu, P.O. Box 3000, FI-90014, Finland 3Institut für Planetologie, Westfälische Wilhelms-Universität, Wilhelm-Klemm-Strasse 10, D-48149 Münster, Germany *Corresponding author. E-mail: [email protected] (Received 20 November 2007; revision accepted 15 April 2008) Abstract–Impact craters are not always circular; sometimes their rims are composed of several straight segments. Such polygonal impact craters (PICs) are controlled by pre-existing target structures, mainly faults or other similar planes of weakness. In the Argyre region, Mars, PICs comprise ∼17% of the total impact crater population (>7 km in diameter), and PICs are relatively more common in older geologic units. Their formation is mainly controlled by radial fractures induced by the Argyre and Ladon impact basins, and to a lesser extent by the basin-concentric fractures. Also basin-induced conjugate shear fractures may play a role. Unlike the PICs, ridges and graben in the Argyre region are mostly controlled by Tharsis-induced tectonism, with the ridges being concentric and graben radial to Tharsis. Therefore, the PICs primarily reflect an old impact basin-centered tectonic pattern, whereas Tharsis-centered tectonism responsible for the graben and the ridges has only minor influence on the PIC rim orientations. -

ORIGIN of the VALLEY NETWORKS on MARS: a HYDROLOGICAL PERSPECTIVE Virginia C. Gulick* Space Science Division, MS 245-3 NASA-Ames
ORIGIN OF THE VALLEY NETWORKS ON MARS: A HYDROLOGICAL PERSPECTIVE Virginia C. Gulick* Space Science Division, MS 245-3 NASA-Ames Research Center Moffett Field, CA 94035 (415) 604-0781 vgulick @ mail.arc.nasa, gov Manuscript accepted for publication in the special Planetary issue of Geomorphology *also at Dept. of Astronomy, New Mexico State University, Las Cruces, NM 2" Abstract The geomorphology of the Martian valley networks is examined from a hydrological perspective for their compatibility with an origin by rainfall, globally higher heat flow, and localized hydrothermal systems. Comparison of morphology and spatial distribution of valleys on geologic surfaces with terrestrial fluvial valleys suggests that most Martian valleys are probably not indicative of a rainfall origin, nor are they indicative of formation by an early global uniformly higher heat flow. In general, valleys are not uniformly distributed within geologic surface units as are terrestrial fluvial valleys. Valleys tend to form either as isolated systems or in clusters on a geologic surface unit leaving large expanses of the unit virtually untouched by erosion. With the exception of fluvial valleys on some volcanoes, most Martian valleys exhibit a sapping morphology and do not appear to have formed along with those that exhibit a runoff morphology. In contrast, terrestrial sapping valleys form from and along with runoff valleys. The isolated or clustered distribution of valleys suggests localized water sources were important in drainage development. Persistent ground-water outflow driven by localized, but vigorous hydrothermal circulation associated with magmatism, volcanism, impacts, or tectonism is, however, consistent with valley morphology and distribution. Snowfall from sublimating ice-covered lakes or seas may have provided an atmospheric water source for the formation of some valleys in regions where the surface is easily eroded and where localized geothermal/hydrothermal activity is sufficient to melt accumulated snowpacks.