THE UCL IUS-TITHONIUM CHASMA DIGITAL ELEVATION MODEL. A. C. Cook1, T
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

NASA Mars Exploration Strategy: “Follow the Water”
Gullies on Mars -- Water or Not? Allan H. Treiman NASA Mars Exploration Strategy: “Follow the Water” Life W Climate A T Geology E Resources R Evidence of Water on Mars Distant Past Crater Degradation and Valley Networks ‘River’ Channels Flat Northern Lowlands Meteorites Carbonate in ALH84001 Clay in nakhlites MER Rover Sites Discoveries Hydrous minerals: jarosite! Fe2O3 from water (blueberries etc.) Silica & sulfate & phosphate deposits Recent Past (Any liquid?) Clouds & Polar Ice Ground Ice Valley Networks and Degraded Craters 1250 km River Channels - Giant Floods! 225 km 10 km craters River Channels - ‘Normal’ Flows 14 km 1 km River Channels from Rain? 700 km Science, July 2, 2004 19 km Ancient Martian Meteorite ALH84001 MER Opportunity - Heatshield and parachute. Jarosite - A Water-bearing Mineral Formed in Groundwater 3+ KFe3 (SO4)2(OH)6 2 Jarosite = K2SO4 + 3 Fe2O3 + 3 H2SO4 Hematite is in “Blueberries,” which still suggest water. Stone Mountain MER Spirit: Columbia Hills H2O Now: Clouds & Polar Caps Ground Ice – Mars Orbiter GRS Water abundances within a few meters depth of the Martian surface. Wm. Feldman. AAAS talk & Los Alamos Nat’l. Lab. Press Release, 15 Feb. 2003. (SPACE.com report, 16 Feb. 2003) So, Water on Mars !! So? Apparently, Mars has/had lots of water. Lots of evidence for ancient liquid water (> ~2 billion years ago), both surface and underground. Martian Gullies - Liquid Water or Not? Material flows down steep slopes, most commonly interpreted as water-bearing debris flows [Malin and Edgett (2000) Science 288, 2330]. Liquid water is difficult to produce and maintain near Mars’ surface, now. -

NOCTIS LANDING: a Proposed Landing Site/Exploration Zone For
NOCTIS LANDING: A Proposed Landing Site/Exploration Zone for Human Missions to the Surface of Mars Pascal Lee1,2,3, Shannen Acedillo1,2, Stephen Braham1, Adrian Brown2, Richard Elphic3, Terry Fong3, Brian Glass3, Christopher Hoftun1, Brage W. Johansen1, Kira Lorber1, David Mittlefehldt4, Yuta Tagaki1,2, Peter Thomas5, Mi- chael West1, Stephen West1, Michael Zolensky4. 1Mars Institute, NASA Research Park, Moffett Field, CA 94035, USA, [email protected]. 2SETI Institute, 3NASA Ames Research Center, 4NASAJohnson Space Center, 5Cornell University. Exploration Zone Name: Noctis Landing Landing Site Coordinates: 6o 29’ 38.33” S, 92o 27’ 12.34” W. The proposed Noctis Landing Landing Site/Exploration Zone (LS/EZ) is shown in Figure 1. Our preliminary study suggests that the proposed site meets all key Science and Resources (incl. Civil Engineering) requirements. The site is of significant interest, as the EZ not only offers a large number and wide range of regions of interest (ROIs) for short-term exploration, it is also located strategically at the crossroads between Tharsis and Valles Marineris, which are key for long-term exploration. Figure 1: Map of the Noctis Landing LS/EZ. The solid red circle marks the distance of 100 km radial range from the Landing Site (LS), defining the primary Exploration Zone (EZ). The dotted red circle marks 200 km radial range from the LS. Areas circled (or ellipsed) in blue are high value science targets located within the primary EZ. Areas outlined in yellow are high-value science targets located outside the EZ, but within 200 km radial range from the LS. White dotted lines represent potential paths for pressurized rover traverses. -

An Overview of the Sulfates Detected in the Equatorial Regions by the Omega/Mex Spectrometer
Seventh International Conference on Mars 3141.pdf AN OVERVIEW OF THE SULFATES DETECTED IN THE EQUATORIAL REGIONS BY THE OMEGA/MEX SPECTROMETER. N. Mangold1, A. Gendrin2, C. Quantin 1, J.-P. Bibring2, B. Gondet2, Y. Langevin 2, F. Poulet2, R. Arvidson3, J. L. Griffes3, H. Hauber4, Ph. Masson1, G. Neukum5, and the OMEGA and HRSC Co - Investigator Teams (1) IDES-Orsay, UMR 8148, CNRS and Université Paris -Sud, Bat. 509, 91405 ORSAY Cedex, France, [email protected], (2) IAS, Université Paris-Sud, France (3) DEPS, Washington University, St Louis, MO, USA (4) DLR, Berlin, Germany (5) FU, Berlin, Germany. Introduction: Sulfates are detected with the spectral Sulfates in Terra Meridiani and chaos region: In data OMEGA (Observatoire pour la Minéralogie, the chaos region, Aram Chaos exhibits a large area of L’Eau, Les Glaces et l’Activité) onboard Mars sulfate-rich deposits corresponding to a part of the Express on many areas of the Valles Marineris - Aram Chaos spectacular layered deposits (Fig. 1). Xanthe Terra chaos and Terra Meridiani regions. These sulfates surround, and are locally found They are present uniquely on the light toned layered together, a location with a strong absorption of iron deposits present inside canyons, in chaos and over the oxides. This iron oxide rich region fits the location Meridiani Planum area [1 to 6]. Sulfates require the where TES discovered gray hematite. This leads to a presence of liquid water in their formation. As a similar context than Meridiani Planum, but, here, iron consequence, sulfates in layered deposits have been oxides are present beneath the sulfates as a result of interpreted either as deposition through evaporitic erosion of material and eolian sorting into sand dunes processes or alteration of preexisting material through at the foothill of scarps. -

Origin of Collapsed Pits and Branched Valleys Surrounding the Ius Chasma on Mars
The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Volume XL-8, 2014 ISPRS Technical Commission VIII Symposium, 09 – 12 December 2014, Hyderabad, India Origin of collapsed pits and branched valleys surrounding the Ius chasma on Mars Gasiganti T. Vamshi, Tapas R. Martha and K. Vinod Kumar National Remote Sensing Centre (NRSC), Hyderabad, India - [email protected], (tapas_martha, vinodkumar_k)@nrsc.gov.in ISPRS Technical Commission VIII Symposium KEY WORDS: Valles Marineris, MEX, HRSC ABSTRACT: Chasma is a deep, elongated and steep sided depression on planetary surfaces. Several hypothesis have been proposed regarding the origin of chasma. In this study, we analysed morphological features in north and south of Ius chasma. Collapsed pits and branched valleys alongwith craters are prominent morphological features surrounding Ius Chasma, which forms the western part of the well known Valles Marineris chasma system on Martian surface. Analysis of images from the High Resolution Stereo Camera (HRSC) in ESA’s Mars Express (MEX) with a spatial resolution of 10 m shows linear arrangement of pits north of the Ius chasma. These pits were initially developed along existing narrow linear valleys parallel to Valles Merineris and are conical in shape unlike flat floored impact craters found adjacent to them. The width of conical pits ranges 1-10 km and depth ranges 1-2 km. With more subsidence, size of individual pits increased gradually and finally coalesced together to create a large depression forming a prominent linear valley. Arrangement of pits in this particular fashion can be attributed to collapse of the surface due to large hollows created in the subsurface because of the withdrawal of either magma or dry ice. -
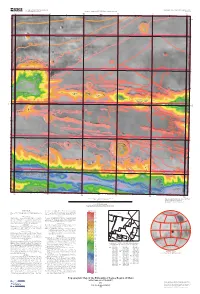
Topographic Map of the Tithonium Chasma Region of Mars
U.S. DEPARTMENT OF THE INTERIOR Prepared for the GEOLOGIC INVESTIGATIONS SERIES I–2806 U.S. GEOLOGICAL SURVEY NATIONAL AERONAUTICS AND SPACE ADMINISTRATION Version 1.0 275°E 276°E 277°E 278°E 85°W 279°E 280°E 84°W 83°W NORTH 82°W 81°W 80°W –2.5° –2.5° Tithoniae 4000 –3° –3° –3° –3° Fossae 4000 3000 –4° –4° –4° –4° 0 –1000 TITHONIUM 4000 2000 3000 1000 1000 –5° –1000 –5° –5° EAST WEST CHASMA –5° 0 4000 3000 Tithoniae 1000 4000 Catenae Tithoniae –6° –6° –6° –6° Fossae 4000 4000 –2000 –3000 –7° –7° –7° –7° 3000 –1000 IUS –4000 –3000 0 1000 CHASMA –3000 Geryon –7.5° Montes –1000 –3000 1000 –1000 –7.5° 85°W 84°W 275°E 276°E 83°W SOUTH 277°E 82°W 278°E 81°W 279°E 80°W 280°E SCALE 1:502 000 (1 mm = 502 m) AT 270° E. (90° W.) LONGITUDE Prepared on behalf of the Planetary Geology and Geophysics Pro- TRANSVERSE MERCATOR PROJECTION gram, Solar System Exploration Division, Office of Space Science, 10 10 20 30 40 6070 80 90 100 National Aeronautics and Space Administration. Manuscript approved for publication August 14, 2003 KILOMETERS CONTOUR INTERVAL 250 METERS Planetocentric latitude and east longitude coordinate system shown in black. Planetographic latitude and west longitude coordinate system shown in red. NOTES ON BASE vation measurements associated with them. This lack of elevation measurements Contour Guide, in meters 65° 65° This map, compiled photogrammetrically from Viking Orbiter stereo image pairs, may result in contour lines that do not adequately represent some features. -

NASA ADS: Stratigraphic Mapping of Hydrated Phases in Western Ius
NASA ADS: Stratigraphic mapping of hydrated phases in Western Ius... http://adsabs.harvard.edu/abs/2013AGUFM.P23F1844C Home Help Sitemap Fulltext Article not available Find Similar Articles Full record info Cull, S.; McGuire, P. C.; Gross, C.; Dumke, A. American Geophysical Union, Fall Meeting 2013, abstract #P23F-1844 Recent mapping with the Compact Reconnaissance Imaging Spectrometer for Mars (CRISM) and Observatoire pour la Minéralogie, l'Eau, les Glaces et l'Activité (OMEGA) has revealed a wide range of hydrated minerals throughout Valles Marineris. Noctis Labyrinthus has interbedded polyhydrated and monohydrated sulfates, with occasional beds of nontronite (Weitz et al. 2010, Thollot et al. 2012). Tithonium Chasma has interbedded poly- and monohydrated sulfates (Murchie et al. 2012); Juventae has poly- and monohydrated sulfates and an anhydrous ferric hydroxysulfate-bearing material (Bishop et al. 2009); and Melas and Eastern Candor contain layers of poly- and monohydrated sulfates (e.g., Roach et al. 2009). Though each chasm displays its own mineralogy, in general, the eastern valles tend to be dominated by layered sequences with sulfates; whereas, the far western valles (Noctis Labyrinthus) has far more mineral phases, possibly due to a wider variety of past environments or processes affecting the area. Ius Chasma, which is situated between Noctis Labyrinthus and the eastern valles and chasmata, also displays a complex mineralogy, with polyhydrated sulfates, Fe/Mg smectites, hydrated silica, and kieserite (e.g. Roach et al. 2010). Here, we present mapping of recently acquired CRISM observations over Ius Chasma, combining the recent CRISM cubes with topographic terrains produced using High Resolution Stereo Camera (HRSC) data from the Mars Express spacecraft. -

Evolution of Major Sedimentary Mounds on Mars: Build-Up Via Anticompensational Stacking Modulated by Climate Change
Evolution of major sedimentary mounds on Mars: build-up via anticompensational stacking modulated by climate change Edwin S. Kite1,*, Jonathan Sneed1, David P. Mayer1, Kevin W. Lewis2, Timothy I. Michaels3, Alicia Hore4, Scot C.R. Rafkin5. 1. University of Chicago. 2. Johns Hopkins University. 3. SETI Institute. 4. Brock University. 5. Southwest Research Institute. (*[email protected]) Abstract. We present a new database of >300 layer-orientations from sedimentary mounds on Mars. These layer orientations, together with draped landslides, and draping of rocks over differentially- eroded paleo-domes, indicate that for the stratigraphically-uppermost ~1 km, the mounds formed by the accretion of draping strata in a mound-shape. The layer-orientation data further suggest that layers lower down in the stratigraphy also formed by the accretion of draping strata in a mound-shape. The data are consistent with terrain-influenced wind erosion, but inconsistent with tilting by flexure, differential compaction over basement, or viscoelastic rebound. We use a simple landscape evolution model to show how the erosion and deposition of mound strata can be modulated by shifts in obliquity. The model is driven by multi-Gyr calculations of Mars’ chaotic obliquity and a parameterization of terrain-influenced wind erosion that is derived from mesoscale modeling. Our results suggest that mound-spanning unconformities with kilometers of relief emerge as the result of chaotic obliquity shifts. Our results support the interpretation that Mars’ rocks record intermittent liquid-water runoff during a 108-yr interval of sedimentary rock emplacement. 1. Introduction. Understanding how sediment accumulated is central to interpreting the Earth’s geologic records (Allen & Allen 2013, Miall 2010). -

Tithonium Chasma on Mars: Evidences for Water Related Processes Time Span on Mars C
40th Lunar and Planetary Science Conference (2009) 1611.pdf Tithonium Chasma on Mars: evidences for water related processes time span on Mars C. I. Popa1,2, F. Esposito1 and L. Colangeli1 1OAC (Osservatorio Astronomico di Capodimonte, Naples Italy; Salita Moiariello 16, [email protected]) 2Univ. “Al. I. Cuza”, Geology Department Iasi, Romania, Blvd. Carol II. Introduction: High albedo features in Valles sition according to the stratigraphic relationship Marineris (VM) were first identified in Mariner 9 with the walls, as well as giving a longer time data and ever since there has been a continuous span to the processes involved in their emplace- source of debate concerning their emplacement ment. They are strongly eroded into flutes, al- and evolution. Tithonium Chasma (TC) system on coves, and yardangs and show almost no impact Mars is the westernmost part of Valles Marineris craters at their surface, attesting either an easily (VM) that present light toned outcrops (LTO) in erodible rock material, a young geologic forma- ambiguous relationship with plain material that tion, or a recent exposure (exhumation) of an old- cuts through. Whatever process of formation of er material. There are two main “trends” of pro- VM (structural collapse and/or spreading tecton- posed hypothesis of formation all involving dif- ism) the presence of these deposits can offer the ferent processes, up to the moment when hydrated means for assessing the Martian water time span, Mg and Ca sulfates where identified using NIR especially the superior limit of the recently pro- spectral signatures of hyperspectral cameras posed wet-dry boundary for Martian global cli- aboard OMEGA ESA Mars Express [Gendrin], matic transition, what is defined as ‘‘theiikian’’ [Bibring] and confirmed with CRISM on NASA era [1]. -

NOCTIS LANDING: a Proposed Landing Site/Exploration Zone For
First Landing Site/Exploration Zone Workshop for Human Missions to the Surface of Mars (2015) 1050.pdf NOCTIS LANDING: A Proposed Landing Site/Exploration Zone for Human Missions to the Surface of Mars Pascal Lee1,2,3, Shannen Acedillo1,2, Stephen Braham1, Adrian Brown2, Richard Elphic3, Terry Fong3, Brian Glass3, Christopher Hoftun1, Brage W. Johansen1, Kira Lorber1, David Mittlefehldt4, Yuta Tagaki1,2, Peter Thomas5, Mi- chael West1, Stephen West1, Michael Zolensky4. 1Mars Institute, NASA Research Park, Moffett Field, CA 94035, USA, [email protected]. 2SETI Institute, 3NASA Ames Research Center, 4NASAJohnson Space Center, 5Cornell University. Exploration Zone Name: Noctis Landing Landing Site Coordinates: 6o 29’ 38.33” S, 92o 27’ 12.34” W. The proposed Noctis Landing Landing Site/Exploration Zone (LS/EZ) is shown in Figure 1. Our preliminary study suggests that the proposed site meets all key Science and Resources (incl. Civil Engineering) requirements. The site is of significant interest, as the EZ not only offers a large number and wide range of regions of interest (ROIs) for short-term exploration, it is also located strategically at the crossroads between Tharsis and Valles Marineris, which are key for long-term exploration. Figure 1: Map of the Noctis Landing LS/EZ. The solid red circle marks the distance of 100 km radial range from the Landing Site (LS), defining the primary Exploration Zone (EZ). The dotted red circle marks 200 km radial range from the LS. Areas circled (or ellipsed) in blue are high value science targets located within the primary EZ. Areas outlined in yellow are high-value science targets located outside the EZ, but within 200 km radial range from the LS. -

Geology and Mineralogy of Tithonium Chasma, Mars A
Geology and mineralogy of Tithonium Chasma, Mars A. Bräucker (1), E. Hauber (1), K. Gwinner (1), A. Gendrin (2), D. Reiss (1), J.P. Bibring (3), R. Jaumann (1), G. Neukum (4) (1) Institute of Planetary Research, German Aerospace Center (DLR), Rutherfordstr. 2, 12489 Berlin, Germany ([email protected]), (2) Department of Geological Sciences, Brown University, Providence, USA, (3) Institut d’Astrophysique Spatiale, CNRS, Orsay, France, (4) Institute of Geosciences, Free University, Berlin, Germany. We investigate the western parts of Tithonium Chasma on Mars, a part of the Valles Marineris trough system. The study area is characterized by a diversity of landforms and spectral contrast in the visible wavelengths, as seen by the High Resolution Stereo Camera (HRSC). Bright interior layered deposits (ILD) dominate the geomorphology of the floor of Tithonium Chasma. They are strongly eroded into flutes and yardangs and show almost no impact craters at their surface, attesting to an easily erodible rock material, recent exposure, and an efficient erosion process. The largest ILD covers an area of about 350 km2 and reaches a maximum height of >2000 m (volume ∼350 km3). Its flank slopes display slope angles of up to 40◦ and more, indicating that it consists of consolidated material. While it is impossible to identify layering at the scale of HRSC images (10-20 m/pixel), MOC images show very fine and uniform lay- ering at meter scales. A lack of boulders at the base of these quite steep slopes might indicate fine-grained material. Other interesting features on the trough floors are land- slides, which in some places could alternatively be interpreted as remnants of glaciers or rock glaciers, and several elongated depressions, which might represent volcanic vents due to their association with tectonic fracture systems. -
Thedatabook.Pdf
THE DATA BOOK OF ASTRONOMY Also available from Institute of Physics Publishing The Wandering Astronomer Patrick Moore The Photographic Atlas of the Stars H. J. P. Arnold, Paul Doherty and Patrick Moore THE DATA BOOK OF ASTRONOMY P ATRICK M OORE I NSTITUTE O F P HYSICS P UBLISHING B RISTOL A ND P HILADELPHIA c IOP Publishing Ltd 2000 All rights reserved. No part of this publication may be reproduced, stored in a retrieval system or transmitted in any form or by any means, electronic, mechanical, photocopying, recording or otherwise, without the prior permission of the publisher. Multiple copying is permitted in accordance with the terms of licences issued by the Copyright Licensing Agency under the terms of its agreement with the Committee of Vice-Chancellors and Principals. British Library Cataloguing-in-Publication Data A catalogue record for this book is available from the British Library. ISBN 0 7503 0620 3 Library of Congress Cataloging-in-Publication Data are available Publisher: Nicki Dennis Production Editor: Simon Laurenson Production Control: Sarah Plenty Cover Design: Kevin Lowry Marketing Executive: Colin Fenton Published by Institute of Physics Publishing, wholly owned by The Institute of Physics, London Institute of Physics Publishing, Dirac House, Temple Back, Bristol BS1 6BE, UK US Office: Institute of Physics Publishing, The Public Ledger Building, Suite 1035, 150 South Independence Mall West, Philadelphia, PA 19106, USA Printed in the UK by Bookcraft, Midsomer Norton, Somerset CONTENTS FOREWORD vii 1 THE SOLAR SYSTEM 1 -
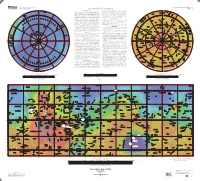
Topographic Map of Mars Any Use of Trade, Product, Or Firm Names in This Publication Is for Descriptive Purposes Only and Does Not Imply Endorsement by the U.S
U.S. DEPARTMENT OF THE INTERIOR Prepared for the GEOLOGIC INVESTIGATIONS SERIES I–2782 U.S. GEOLOGICAL SURVEY NATIONAL AERONAUTICS AND SPACE ADMINISTRATION SHEET 1 OF 2 180° 0° 55° NOTES ON BASE between maps and quadrangles, and most closely resembles lighting conditions –55° This map is based on data from the Mars Orbiter Laser Altimeter (MOLA; found on imagery. The DEM values were then mapped to a smooth global color RussellRussell StokesStokes look-up table. Note that the chosen color scheme simply represents elevation us 150 Smith and others, 2001), an instrument on NASA’s Mars Global Surveyor NOACHISN O A C H I S o E E orousor 30 ° 210 ° E changes and is not intended to imply anything about surface characteristics (for ° p 330 ° E 210 W (MGS) spacecraft (Albee and others, 2001). The image used for the base of this 330 o ° ° W ° W DarwinDarwin lc ° W 150 example, past or current presence of water or ice). These two files were then 30 ha s map represents more than 600 million measurements gathered between 1999 and ChalcopC pe 60° merged and scaled to 1:25 million for the Mercator portion and 1:15,196,708 for –60° u v 2001, adjusted for consistency (Neumann and others, 2001, 2003) and converted R MilankovicMilankovic to planetary radii. These have been converted to elevations above the areoid as the two Polar Stereographic portions, with a resolution of 300 dots per inch. The determined from a martian gravity field solution GMM-2B (Lemoine and others, projections have a common scale of 1:13,923,113 at ±56° latitude.