Positional Astronomy : Earth Orbit Around Sun
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Appendix a Orbits
Appendix A Orbits As discussed in the Introduction, a good ¯rst approximation for satellite motion is obtained by assuming the spacecraft is a point mass or spherical body moving in the gravitational ¯eld of a spherical planet. This leads to the classical two-body problem. Since we use the term body to refer to a spacecraft of ¯nite size (as in rigid body), it may be more appropriate to call this the two-particle problem, but I will use the term two-body problem in its classical sense. The basic elements of orbital dynamics are captured in Kepler's three laws which he published in the 17th century. His laws were for the orbital motion of the planets about the Sun, but are also applicable to the motion of satellites about planets. The three laws are: 1. The orbit of each planet is an ellipse with the Sun at one focus. 2. The line joining the planet to the Sun sweeps out equal areas in equal times. 3. The square of the period of a planet is proportional to the cube of its mean distance to the sun. The ¯rst law applies to most spacecraft, but it is also possible for spacecraft to travel in parabolic and hyperbolic orbits, in which case the period is in¯nite and the 3rd law does not apply. However, the 2nd law applies to all two-body motion. Newton's 2nd law and his law of universal gravitation provide the tools for generalizing Kepler's laws to non-elliptical orbits, as well as for proving Kepler's laws. -

Elliptical Orbits
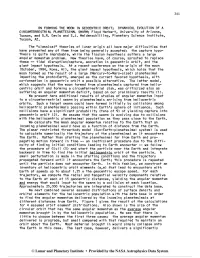
1 Ellipse-geometry 1.1 Parameterization • Functional characterization:(a: semi major axis, b ≤ a: semi minor axis) x2 y 2 b p + = 1 ⇐⇒ y(x) = · ± a2 − x2 (1) a b a • Parameterization in cartesian coordinates, which follows directly from Eq. (1): x a · cos t = with 0 ≤ t < 2π (2) y b · sin t – The origin (0, 0) is the center of the ellipse and the auxilliary circle with radius a. √ – The focal points are located at (±a · e, 0) with the eccentricity e = a2 − b2/a. • Parameterization in polar coordinates:(p: parameter, 0 ≤ < 1: eccentricity) p r(ϕ) = (3) 1 + e cos ϕ – The origin (0, 0) is the right focal point of the ellipse. – The major axis is given by 2a = r(0) − r(π), thus a = p/(1 − e2), the center is therefore at − pe/(1 − e2), 0. – ϕ = 0 corresponds to the periapsis (the point closest to the focal point; which is also called perigee/perihelion/periastron in case of an orbit around the Earth/sun/star). The relation between t and ϕ of the parameterizations in Eqs. (2) and (3) is the following: t r1 − e ϕ tan = · tan (4) 2 1 + e 2 1.2 Area of an elliptic sector As an ellipse is a circle with radius a scaled by a factor b/a in y-direction (Eq. 1), the area of an elliptic sector PFS (Fig. ??) is just this fraction of the area PFQ in the auxiliary circle. b t 2 1 APFS = · · πa − · ae · a sin t a 2π 2 (5) 1 = (t − e sin t) · a b 2 The area of the full ellipse (t = 2π) is then, of course, Aellipse = π a b (6) Figure 1: Ellipse and auxilliary circle. -

Perturbation Theory in Celestial Mechanics
Perturbation Theory in Celestial Mechanics Alessandra Celletti Dipartimento di Matematica Universit`adi Roma Tor Vergata Via della Ricerca Scientifica 1, I-00133 Roma (Italy) ([email protected]) December 8, 2007 Contents 1 Glossary 2 2 Definition 2 3 Introduction 2 4 Classical perturbation theory 4 4.1 The classical theory . 4 4.2 The precession of the perihelion of Mercury . 6 4.2.1 Delaunay action–angle variables . 6 4.2.2 The restricted, planar, circular, three–body problem . 7 4.2.3 Expansion of the perturbing function . 7 4.2.4 Computation of the precession of the perihelion . 8 5 Resonant perturbation theory 9 5.1 The resonant theory . 9 5.2 Three–body resonance . 10 5.3 Degenerate perturbation theory . 11 5.4 The precession of the equinoxes . 12 6 Invariant tori 14 6.1 Invariant KAM surfaces . 14 6.2 Rotational tori for the spin–orbit problem . 15 6.3 Librational tori for the spin–orbit problem . 16 6.4 Rotational tori for the restricted three–body problem . 17 6.5 Planetary problem . 18 7 Periodic orbits 18 7.1 Construction of periodic orbits . 18 7.2 The libration in longitude of the Moon . 20 1 8 Future directions 20 9 Bibliography 21 9.1 Books and Reviews . 21 9.2 Primary Literature . 22 1 Glossary KAM theory: it provides the persistence of quasi–periodic motions under a small perturbation of an integrable system. KAM theory can be applied under quite general assumptions, i.e. a non– degeneracy of the integrable system and a diophantine condition of the frequency of motion. -

Moon-Earth-Sun: the Oldest Three-Body Problem
Moon-Earth-Sun: The oldest three-body problem Martin C. Gutzwiller IBM Research Center, Yorktown Heights, New York 10598 The daily motion of the Moon through the sky has many unusual features that a careful observer can discover without the help of instruments. The three different frequencies for the three degrees of freedom have been known very accurately for 3000 years, and the geometric explanation of the Greek astronomers was basically correct. Whereas Kepler’s laws are sufficient for describing the motion of the planets around the Sun, even the most obvious facts about the lunar motion cannot be understood without the gravitational attraction of both the Earth and the Sun. Newton discussed this problem at great length, and with mixed success; it was the only testing ground for his Universal Gravitation. This background for today’s many-body theory is discussed in some detail because all the guiding principles for our understanding can be traced to the earliest developments of astronomy. They are the oldest results of scientific inquiry, and they were the first ones to be confirmed by the great physicist-mathematicians of the 18th century. By a variety of methods, Laplace was able to claim complete agreement of celestial mechanics with the astronomical observations. Lagrange initiated a new trend wherein the mathematical problems of mechanics could all be solved by the same uniform process; canonical transformations eventually won the field. They were used for the first time on a large scale by Delaunay to find the ultimate solution of the lunar problem by perturbing the solution of the two-body Earth-Moon problem. -

New Closed-Form Solutions for Optimal Impulsive Control of Spacecraft Relative Motion
New Closed-Form Solutions for Optimal Impulsive Control of Spacecraft Relative Motion Michelle Chernick∗ and Simone D'Amicoy Aeronautics and Astronautics, Stanford University, Stanford, California, 94305, USA This paper addresses the fuel-optimal guidance and control of the relative motion for formation-flying and rendezvous using impulsive maneuvers. To meet the requirements of future multi-satellite missions, closed-form solutions of the inverse relative dynamics are sought in arbitrary orbits. Time constraints dictated by mission operations and relevant perturbations acting on the formation are taken into account by splitting the optimal recon- figuration in a guidance (long-term) and control (short-term) layer. Both problems are cast in relative orbit element space which allows the simple inclusion of secular and long-periodic perturbations through a state transition matrix and the translation of the fuel-optimal optimization into a minimum-length path-planning problem. Due to the proper choice of state variables, both guidance and control problems can be solved (semi-)analytically leading to optimal, predictable maneuvering schemes for simple on-board implementation. Besides generalizing previous work, this paper finds four new in-plane and out-of-plane (semi-)analytical solutions to the optimal control problem in the cases of unperturbed ec- centric and perturbed near-circular orbits. A general delta-v lower bound is formulated which provides insight into the optimality of the control solutions, and a strong analogy between elliptic Hohmann transfers and formation-flying control is established. Finally, the functionality, performance, and benefits of the new impulsive maneuvering schemes are rigorously assessed through numerical integration of the equations of motion and a systematic comparison with primer vector optimal control. -

The Annual Compendium of Commercial Space Transportation: 2017
Federal Aviation Administration The Annual Compendium of Commercial Space Transportation: 2017 January 2017 Annual Compendium of Commercial Space Transportation: 2017 i Contents About the FAA Office of Commercial Space Transportation The Federal Aviation Administration’s Office of Commercial Space Transportation (FAA AST) licenses and regulates U.S. commercial space launch and reentry activity, as well as the operation of non-federal launch and reentry sites, as authorized by Executive Order 12465 and Title 51 United States Code, Subtitle V, Chapter 509 (formerly the Commercial Space Launch Act). FAA AST’s mission is to ensure public health and safety and the safety of property while protecting the national security and foreign policy interests of the United States during commercial launch and reentry operations. In addition, FAA AST is directed to encourage, facilitate, and promote commercial space launches and reentries. Additional information concerning commercial space transportation can be found on FAA AST’s website: http://www.faa.gov/go/ast Cover art: Phil Smith, The Tauri Group (2017) Publication produced for FAA AST by The Tauri Group under contract. NOTICE Use of trade names or names of manufacturers in this document does not constitute an official endorsement of such products or manufacturers, either expressed or implied, by the Federal Aviation Administration. ii Annual Compendium of Commercial Space Transportation: 2017 GENERAL CONTENTS Executive Summary 1 Introduction 5 Launch Vehicles 9 Launch and Reentry Sites 21 Payloads 35 2016 Launch Events 39 2017 Annual Commercial Space Transportation Forecast 45 Space Transportation Law and Policy 83 Appendices 89 Orbital Launch Vehicle Fact Sheets 100 iii Contents DETAILED CONTENTS EXECUTIVE SUMMARY . -
ON FORMING the MOON in GEOCENTRIC ORBIT Herbert, F., Et Al
ON FORMING ME MOON IN GEOCENTRIC ORBIT; DYNAMICAL EVOLUTION OF A CIRCUMTERRESTRIAL PLANETESIMAL SWARM; Floyd Herbert, University of Arizona, Tucson, and D.R. Davis and S.J. Weidenschilling, Planetary Science Institute, Tucson, AZ. The wclassicalv theories of lunar origin all have major difficulties that have prevented any of them from beinq generally accepted: the capture hypo- thesis is quite improbable, while the fission hypothesis suffers a larqe anqular momentum problem. New theories have, of course, sprouted to replace these -- tidal disruption/capture, accretion in geocentric orbit, and the qiant impact hypothesis. At a recent conference on the oriqin of the moon (October, 1984, Kona, HI), the qiant impact hypothesis, which holds that the moon formed as the result of a large (Mercury-to-Mars-sized) planetesimal impactinq the proto-Earth, emerqed as the current favored hypothesis, with co-formation in geocentric orbit a possible alternative. The latter model, which suqgests that the moon formed from planetesimals captured from helio- centric orbit and forminq a circumterrestrial disk, was criticized also as suffering an angular momentum deficit, based on our preliminary results (1). We present here additional results of studies of anqular momen-tum input to a circumterrestrial swarm by planetesimals arriving from heliocentric orbits. Such a target swarm could have formed initially by collisions among heliocentric planetesimals passing within Earth's sphere of influence. Such collisions have a siqnificant probability (tens of $1 of yieldinq capture into qeocentric orbit (2). We assume that the swarm is evolvinq due to collisions with the heliocentric planetesimal population as they pass close to the Earth. -

Kepler's Equation—C.E. Mungan, Fall 2004 a Satellite Is Orbiting a Body
Kepler’s Equation—C.E. Mungan, Fall 2004 A satellite is orbiting a body on an ellipse. Denote the position of the satellite relative to the body by plane polar coordinates (r,) . Find the time t that it requires the satellite to move from periapsis (position of closest approach) to angular position . Express your answer in terms of the eccentricity e of the orbit and the period T for a full revolution. According to Kepler’s second law, the ratio of the shaded area A to the total area ab of the ellipse (with semi-major axis a and semi-minor axis b) is the respective ratio of transit times, A t = . (1) ab T But we can divide the shaded area into differential triangles, of base r and height rd , so that A = 1 r2d (2) 2 0 where the polar equation of a Keplerian orbit is c r = (3) 1+ ecos with c the semilatus rectum (distance vertically from the origin on the diagram above to the ellipse). It is not hard to show from the geometrical properties of an ellipse that b = a 1 e2 and c = a(1 e2 ) . (4) Substituting (3) into (2), and then (2) and (4) into (1) gives T (1 e2 )3/2 t = M where M d . (5) 2 2 0 (1 + ecos) In the literature, M is called the mean anomaly. This is an integral solution to the problem. It turns out however that this integral can be evaluated analytically using the following clever change of variables, e + cos cos E = . -

SATELLITES ORBIT ELEMENTS : EPHEMERIS, Keplerian ELEMENTS, STATE VECTORS
www.myreaders.info www.myreaders.info Return to Website SATELLITES ORBIT ELEMENTS : EPHEMERIS, Keplerian ELEMENTS, STATE VECTORS RC Chakraborty (Retd), Former Director, DRDO, Delhi & Visiting Professor, JUET, Guna, www.myreaders.info, [email protected], www.myreaders.info/html/orbital_mechanics.html, Revised Dec. 16, 2015 (This is Sec. 5, pp 164 - 192, of Orbital Mechanics - Model & Simulation Software (OM-MSS), Sec 1 to 10, pp 1 - 402.) OM-MSS Page 164 OM-MSS Section - 5 -------------------------------------------------------------------------------------------------------43 www.myreaders.info SATELLITES ORBIT ELEMENTS : EPHEMERIS, Keplerian ELEMENTS, STATE VECTORS Satellite Ephemeris is Expressed either by 'Keplerian elements' or by 'State Vectors', that uniquely identify a specific orbit. A satellite is an object that moves around a larger object. Thousands of Satellites launched into orbit around Earth. First, look into the Preliminaries about 'Satellite Orbit', before moving to Satellite Ephemeris data and conversion utilities of the OM-MSS software. (a) Satellite : An artificial object, intentionally placed into orbit. Thousands of Satellites have been launched into orbit around Earth. A few Satellites called Space Probes have been placed into orbit around Moon, Mercury, Venus, Mars, Jupiter, Saturn, etc. The Motion of a Satellite is a direct consequence of the Gravity of a body (earth), around which the satellite travels without any propulsion. The Moon is the Earth's only natural Satellite, moves around Earth in the same kind of orbit. (b) Earth Gravity and Satellite Motion : As satellite move around Earth, it is pulled in by the gravitational force (centripetal) of the Earth. Contrary to this pull, the rotating motion of satellite around Earth has an associated force (centrifugal) which pushes it away from the Earth. -

A Series Solution for Some Periodic Orbits in the Restricted Three-Body Problem According to the Perturbation Method*
1966028656-225 !'_#.,/I ,i A SERIES SOLUTION FOR SOME PERIODIC ORBITS IN THE RESTRICTED THREE-BODY PROBLEM ACCORDING TO THE PERTURBATION METHOD* q Oil9"b su-s.u.UAXO, bodies in the restric'_ed three-body problem. The expansion is in terms of the mass of the less b massiveA seriesfiniteis body.obtainedThefor initialthose periodicconditionsorbitspredictedsurroundingby thetheseriesmoreformassiveseveral ofperiodicthe two orbitsfinite are compared with those obtained by purely numerical processes. They are in good ttgreement for the case corresponding to the earth-moon system. Also, a simple theory of nearly periodic orbits in the neighborhood of a periodic orbit is developed and numerically verified by ex'tmples. Finally, it is suggested that, if asteroids avoid places where their orbits wouhl be commensurable with the period of Jupiter, then artificial satellites and dust particles may avoid certain areas around the earth as a result of the presence of the moon. INTF:ODUCTION Actually, the present analysis is somewhat par- allel to the analysis that led Hill to his variation A periodic solution may be regarded as a solu- orbit, for both his and the present method ,lcpend tion of the differential equations of motion that upon some series expansions. However, in his satisfies, in addition to the initial conditions, the lunar theory Hill expanded the sohltion in terms condition that after a lapse of one period, P, both of the ratio of the mean motion of tim sun to that coordinates and velocities return to their initial of the moon in tlle rotating coordinate system. values. Thus, the problem of finding a periodic In this prcsent theory for artificial satellites orbit in celestial mechanics resembles the problem orbiting the earth in the earth-moon system the of finding the eigen function for an eigen value in solution is expanded in terms of the mass of the quantum mechanics, since the eigen value is deter- moon. -

2. Orbital Mechanics MAE 342 2016
2/12/20 Orbital Mechanics Space System Design, MAE 342, Princeton University Robert Stengel Conic section orbits Equations of motion Momentum and energy Kepler’s Equation Position and velocity in orbit Copyright 2016 by Robert Stengel. All rights reserved. For educational use only. http://www.princeton.edu/~stengel/MAE342.html 1 1 Orbits 101 Satellites Escape and Capture (Comets, Meteorites) 2 2 1 2/12/20 Two-Body Orbits are Conic Sections 3 3 Classical Orbital Elements Dimension and Time a : Semi-major axis e : Eccentricity t p : Time of perigee passage Orientation Ω :Longitude of the Ascending/Descending Node i : Inclination of the Orbital Plane ω: Argument of Perigee 4 4 2 2/12/20 Orientation of an Elliptical Orbit First Point of Aries 5 5 Orbits 102 (2-Body Problem) • e.g., – Sun and Earth or – Earth and Moon or – Earth and Satellite • Circular orbit: radius and velocity are constant • Low Earth orbit: 17,000 mph = 24,000 ft/s = 7.3 km/s • Super-circular velocities – Earth to Moon: 24,550 mph = 36,000 ft/s = 11.1 km/s – Escape: 25,000 mph = 36,600 ft/s = 11.3 km/s • Near escape velocity, small changes have huge influence on apogee 6 6 3 2/12/20 Newton’s 2nd Law § Particle of fixed mass (also called a point mass) acted upon by a force changes velocity with § acceleration proportional to and in direction of force § Inertial reference frame § Ratio of force to acceleration is the mass of the particle: F = m a d dv(t) ⎣⎡mv(t)⎦⎤ = m = ma(t) = F ⎡ ⎤ dt dt vx (t) ⎡ f ⎤ ⎢ ⎥ x ⎡ ⎤ d ⎢ ⎥ fx f ⎢ ⎥ m ⎢ vy (t) ⎥ = ⎢ y ⎥ F = fy = force vector dt -

Successful Demonstration for Upper Stage Controlled Re-Entry Experiment by H-IIB Launch Vehicle
Mitsubishi Heavy Industries Technical Review Vol. 48 No. 4 (December 2011) 11 Successful Demonstration for Upper Stage Controlled Re-entry Experiment by H-IIB Launch Vehicle KAZUO TAKASE*1 MASANORI TSUBOI*2 SHIGERU MORI*3 KIYOSHI KOBAYASHI*3 The space debris created by launch vehicles after orbital injections can be hazardous. A piece of debris can collide with artificial satellites or cause a casualty when it falls back to earth, which is an ongoing problem among countries that utilize outer space. This paper reports on a Japanese controlled re-entry disposal method that brings the upper stage of a launch vehicle down in a safe ocean area after the mission has been completed. The method was successfully demonstrated on the H-IIB launch vehicle during Flight No. 2, and provides a means of reducing the amount of space debris and the risk of ground casualty. |1. Introduction The H-IIB launch vehicle was jointly developed by the Japan Aerospace Exploration Agency (JAXA) and Mitsubishi Heavy Industries, Ltd., to launch the Kounotori (‘Stork’) H-II Transfer Vehicle (HTV), which carries supply goods to the International Space Station (ISS). The H-IIB launch vehicle has the largest launch capability of the H-IIA launch vehicle family: it can inject a 16.5-ton HTV into a low earth orbit (ISS transfer orbit). Figure 1 shows an overview of the H-IIB launch vehicle. Figure 1 Overview of the H-IIB launch vehicle The changes introduced in the H-IIB launch vehicle are as follows: ・ Enhanced first stage relative to the H-IIA: tank diameter extension, cluster system for two main engines, and four solid rocket boosters (SRB-A) ・ Reinforced upper stage (second stage) relative to the H-IIA to launch the HTV ・ 5S-H fairing (newly developed to launch the HTV) H-IIB Test Flight No.