Further Developments in the Electromagnetically Sustained Rhodes Piano
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Tyrone Jackson, Jazz Piano
KENNESAW STATE UNIVERSITY SCHOOL OF MUSIC Tyrone Jackson Faculty Recital "Tribute to The Fender Rhodes in Jazz" Tyrone Jackson, fender rhodes Karla Harris, vocals Patrick Arthur, electric guitar Brandon Boone, upright and electric bass Chris Burroughs, drums Frankie Quinones, percussion Wednesday, October 18, 2017 at 8 pm Dr. Bobbie Bailey & Family Performance Center, Morgan Hall Twenty-eighth Concert of the 2017-18 Concert Season program This concert is a tribute to the iconic instrument, the Fender Rhodes. The Rhodes piano (also known as the Fender Rhodes piano or simply Fender Rhodes or Rhodes) is an electric piano invented by Harold Rhodes, which became particularly popular throughout the 1970s. CBS oversaw mass production of the Rhodes piano in the 1970s, and it was used extensively through the decade, particularly in jazz, pop, and soul music. The Rhodes became a staple in recordings and live performances for renown keyboard artists Herbie Hancock and Chick Corea. A resurgence of the instrument recently has been realized through jazz musicians Nicholas Payton and Christian Scott. "Tribute to The Fender Rhodes in Jazz" The Backwards Step / Nicholas Payton Scenario / Tyrone Jackson Come Together / Lennon-McCartney Cry Me A River / Arthur Hamilton Benin / Tyrone Jackson By Chance / Tyrone Jackson Take 5 / Desmond-Brubeck Sound of Music / Rodgers-Hammerstein Butterfly / Herbie Hancock Song for Bilbao / Pat Methany Lecturer in Jazz Studies and Jazz Piano yrone Jackson – the name is quickly becoming synonymous with the quintessential jazz piano player. His boundless creativity coupled with subtle accompaniments has Tyrone poised for national recognition. TBorn in the New Orleans cradle of jazz, Jackson embodies the spirit of the Crescent City. -

Magpick: an Augmented Guitar Pick for Nuanced Control
Magpick: an Augmented Guitar Pick for Nuanced Control Fabio Morreale Andrea Guidi Andrew McPherson Creative Arts and Industries Centre For Digital Music Centre For Digital Music University of Auckland, Queen Mary University of Queen Mary University of New Zealand London, UK London, UK [email protected] [email protected] [email protected] ABSTRACT This paper introduces the Magpick, an augmented pick for electric guitar that uses electromagnetic induction to sense the motion of the pick with respect to the permanent mag- nets in the guitar pickup. The Magpick provides the gui- tarist with nuanced control of the sound that coexists with traditional plucking-hand technique. The paper presents three ways that the signal from the pick can modulate the guitar sound, followed by a case study of its use in which 11 guitarists tested the Magpick for five days and composed a piece with it. Reflecting on their comments and experi- Figure 1: The Magpick is composed of two parts: a ences, we outline the innovative features of this technology hollow body (black) and a cap (brass). from the point of view of performance practice. In partic- ular, compared to other augmentations, the high tempo- ral resolution, low latency, and large dynamic range of the The challenge is to find ways to sense the movement of Magpick support a highly nuanced control over the sound. the pick with respect to the guitar with high resolution, Our discussion highlights the utility of having the locus of high dynamic range, and low latency, then use the resulting augmentation coincide with the locus of interaction. -

Guitar Resonator GR-Junior II
Guitar Resonator GR-Junior II User Manual Copyright © by Vibesware, all rights reserved. www.vibesware.com Rev. 1.0 Contents 1 Introduction ...............................................................................................1 1.1 How does it work ? ...............................................................................1 1.2 Differences to the EBow and well known Sustainers ............................2 2 Fields of application .................................................................................3 2.1 Feedback playing everywhere / composing / recording ........................3 2.2 On stage ...............................................................................................3 2.3 New ways of playing .............................................................................4 3 Start-Up of the GR-Junior .........................................................................5 4 Playing techniques ...................................................................................5 4.1 Basics ...................................................................................................5 4.2 Harmonics control by positioning the Resonator ...................................6 4.3 Changing harmonics by phase shifting .................................................6 4.4 Some string vibration basics .................................................................6 4.5 Feedback of multiple strings .................................................................9 4.6 Limits of playing, pickup selection, -

USING MICROPHONE ARRAYS to RECONSTRUCT MOVING SOUND SOURCES for AURALIZATION 1 Introduction
USING MICROPHONE ARRAYS TO RECONSTRUCT MOVING SOUND SOURCES FOR AURALIZATION Fanyu Meng, Michael Vorlaender Institute of Technical Acoustics, RWTH Aachen University, Germany {[email protected]) Abstract Microphone arrays are widely used for sound source characterization as well as for moving sound sources. Beamforming is one of the post processing methods to localize sound sources based on microphone array in order to create a color map (the so-called “acoustic camera”). The beamformer response lies on the array pattern, which is influenced by the array shape. Irregular arrays are able to avoid the spatial aliasing which causes grating lobes and degrades array performance to find the spatial positions of sources. With precise characteristics from the beamformer output, the sources can be reconstructed regarding not only spatial distribution but also spectra. Therefore, spectral modeling methods, e.g. spectral modeling synthesis (SMS) can be combined to the previous results to obtain source signals for auralization. In this paper, we design a spiral microphone array to obtain a specific frequency range and resolution. Besides, an unequal-spacing rectangular array is developed as well to compare the performance with the spiral array. Since the second array is separable, Kronecker Array Transform (KAT) can be used to accelerate the beamforming calculation. The beamforming output can be optimized by using deconvolution approach to remove the array response function which is convolved with source signals. With the reconstructed source spectrum generated from the deconvolved beamforming output, the source signal is synthesized separately from tonal and broadband components. Keywords: auralization, synthesizer, microphone arrays, beamforming, SMS PACS no. -

Real-Time Physical Model of a Wurlitzer and Rhodes Electric Piano
Proceedings of the 20th International Conference on Digital Audio Effects (DAFx-17), Edinburgh, UK, September 5–9, 2017 REAL-TIME PHYSICAL MODEL OF A WURLITZER AND RHODES ELECTRIC PIANO Florian Pfeifle Systematic Musicology, University of Hamburg Hamburg, DE [email protected] ABSTRACT tation methodology as is published in [21]. This work aims at extending the existing physical models of mentioned publications Two well known examples of electro-acoustical keyboards played in two regards by (1) implementing them on a FPGA for real-time since the 60s to the present day are the Wurlitzer electric piano synthesis and (2) making the physical model more accurate when and the Rhodes piano. They are used in such diverse musical gen- compared to physical measurements as is discussed in more detail res as Jazz, Funk, Fusion or Pop as well as in modern Electronic in section 4 and 5. and Dance music. Due to the popularity of their unique sound and timbre, there exist various hardware and software emulations which are either based on a physical model or consist of a sample 2. RELATED WORK based method for sound generation. In this paper, a real-time phys- ical model implementation of both instruments using field pro- Scientific research regarding acoustic and electro-mechanic prop- grammable gate array (FPGA) hardware is presented. The work erties of both instruments is comparably sparse. Freely available presented herein is an extension of simplified models published user manuals as well as patents surrounding the tone production before. Both implementations consist of a physical model of the of the instruments give an overview of basic physical properties of main acoustic sound production parts as well as a model for the both instrument [5]; [7]; [8]; [13]; [4]. -
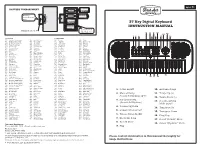
37 Key Digital Keyboard INSTRUCTION MANUAL
ages: 3+ BATTERY COMPARTMENT Battery Compartment Door 37 Key Digital Keyboard INSTRUCTION MANUAL Phillips head screw Insert 4X AA Size Batteries 5 6 7 10 14 13 1 2 4 8 9 11 12 100 SOUNDS 100 RHYTHMS T00 Acoustic Grand Piano T50 Synth Strings 2 R00 Fusion R50 Disco T01 Bright Acoustic Piano T51 Choir Aahs R01 Clup Pop R51 Electro Pop T02 Electric Grand Piano T52 Voice Oohs R02 16 Beat Pop R52 Hip Hop T03 Honky-Tonk Piano T53 Synth Voice R03 8 Beat Pop R53 Rap Pop T04 Rhodes Piano T54 Orchestra Hit R04 8 Beat Soul R54 Techno T05 Chorused Piano T55 Trumpet R05 Pop Rock R55 Trance T06 Harpsichord T56 Trombone R06 60's Soul R56 Funky Disco T07 Clavi T57 Tuba R07 8 Beat Rock R57 Disco Party T08 Celesta T58 Muted Trumpet R08 Funk R58 Disco Samba T09 Glockenspiel T59 French Horn R09 Twist R59 Club Latin T10 Music Box T60 Brass Section R10 British Pop R60 Club Dance T11 Vibraphone T61 Synth Brass 1 R11 Rock Ballad R61 Disco Funk T12 Marimba T62 Synth Brass 2 R12 Limbo Rock R62 Disco Hands T13 Xylophone T63 Soprano Sax R13 Hard Rock R63 Disco Alt T14 Tubular Bells T64 Alto Sax R14 Rock & Roll R64 Saturday Night T15 Dulcimer T65 Tenor Sax R15 Straight Rock R65 Hip Shuffle T16 Drawbar Organ T66 Baritone Sax R16 Jazz Rock R66 Garage T17 Percussive Organ T67 Oboe R17 Schlager Rock R67 UK Pop T18 Rock Organ T68 English Horn R18 Waltz R68 Slow & Easy T19 Church Organ T69 Bassoon R19 Samba R69 Modern Country Pop T20 Reed Organ T70 Clarinet R20 Tango R70 Country Ballad T21 Accordion T71 Piccolo R21 Cha Cha R71 Schlager T22 Harmonica T72 Flute R22 Paso -

Latin American Nimes: Electronic Musical Instruments and Experimental Sound Devices in the Twentieth Century
Latin American NIMEs: Electronic Musical Instruments and Experimental Sound Devices in the Twentieth Century Martín Matus Lerner Desarrollos Tecnológicos Aplicados a las Artes EUdA, Universidad Nacional de Quilmes Buenos Aires, Argentina [email protected] ABSTRACT 2. EARLY EXPERIENCES During the twentieth century several Latin American nations 2.1 The singing arc in Argentina (such as Argentina, Brazil, Chile, Cuba and Mexico) have In 1900 William du Bois Duddell publishes an article in which originated relevant antecedents in the NIME field. Their describes his experiments with “the singing arc”, one of the first innovative authors have interrelated musical composition, electroacoustic musical instruments. Based on the carbon arc lutherie, electronics and computing. This paper provides a lamp (in common use until the appearance of the electric light panoramic view of their original electronic instruments and bulb), the singing or speaking arc produces a high volume buzz experimental sound practices, as well as a perspective of them which can be modulated by means of a variable resistor or a regarding other inventions around the World. microphone [35]. Its functioning principle is present in later technologies such as plasma loudspeakers and microphones. Author Keywords In 1909 German physicist Emil Bose assumes direction of the Latin America, music and technology history, synthesizer, drawn High School of Physics at the Universidad de La Plata. Within sound, luthería electrónica. two years Bose turns this institution into a first-rate Department of Physics (pioneer in South America). On March 29th 1911 CCS Concepts Bose presents the speaking arc at a science event motivated by the purchase of equipment and scientific instruments from the • Applied computing → Sound and music German company Max Kohl. -
How to Effectively Listen and Enjoy a Classical Music Concert
HOW TO EFFECTIVELY LISTEN AND ENJOY A CLASSICAL MUSIC CONCERT 1. INTRODUCTION Hearing live music is one of the most pleasurable experiences available to human beings. The music sounds great, it feels great, and you get to watch the musicians as they create it. No matter what kind of music you love, try listening to it live. This guide focuses on classical music, a tradition that originated before recordings, radio, and the Internet, back when all music was live music. In those days live human beings performed for other live human beings, with everybody together in the same room. When heard in this way, classical music can have a special excitement. Hearing classical music in a concert can leave you feeling refreshed and energized. It can be fun. It can be romantic. It can be spiritual. It can also scare you to death. Classical music concerts can seem like snobby affairs full of foreign terminology and peculiar behavior. It can be hard to understand what’s going on. It can be hard to know how to act. Not to worry. Concerts are no weirder than any other pastime, and the rules of behavior are much simpler and easier to understand than, say, the stock market, football, or system software upgrades. If you haven’t been to a live concert before, or if you’ve been baffled by concerts, this guide will explain the rigmarole so you can relax and enjoy the music. 2. THE LISTENER'S JOB DESCRIPTION Classical music concerts can seem intimidating. It seems like you have to know a lot. -

S5.3 Series - 12 Channel Wireless System
The Worlds Finest Wireles Systems Wireless Catalog S5.3 Series - 12 Channel Wireless System The S5.3 Series is widely used by semi professional and professionals in theater, concerts and broadcasting thanks to it’s easy to use and reliable performance. Enabling up to 12 simultaneous channels to run at once, the S5.3 Series boasts an exceptional performance/cost ratio for venues of any size. 12 Channels Up to 12 channels can run simultaneously UHF Dual Conversion Receiver Fully synthesized UHF dual conversion receiver Long Battery Life A single AA battery gives up to 10 hours of quality performance with a range of up to 100 meters S5.3 Series 12 Channel Wireless System S5.3-RX Receiver True diversity operation Power Consumption 300 mA (13V DC) Space Diversity (true diversity) Up to 640 selectable frequencies Diversity System Audio Output Line: -22dB / Mic: 62dB USB based computer monitoring Antenna Phantom 9V DC, 30 mA (max) Frequency scan function Power Integral tone grip/noise and signal Receiving Sensitivity 0 bD V or less(12dB SINAD) strength mute circuit for protection Squelch Sensitivity 6-36dB μV variable against external interference S/N Ratio Over 110dB (A-weighted) Simple programming of transmitter with Harmonic Distortion Under 1% (typical) built-in Infra-red data link Frequency Response 50Hz-20kHz, +3dB Dimensions 210(W) x 46(H) x 210(D) mm (8.3” x 1.8” x Clear and intuitive LCD displays 8.3”) excluding antenna Professional metal enclosure Weight 1.3kg (2.87lbs) S5.3 Series Kits Dynamic Handheld Mic Set Lavaliere Microphone Set S5.3-HD=S5.3-RX+S5.3-HDX S5.3-L=S5.3-RX+S5.3-BTX+Lavaliere Mic Condenser Handheld Mic Set S5.3-HC=S5.3-RX+S5.3-HCX S5.3 Series S5.3-HDX (Dynamic) 12 Channel Wireless System S5.3-HCX (Condenser) Handheld Transmitter Simple programming of transmitter with built-in infra-red data link Frequency and Power lock facility Single AA transmitter battery life of approx 10 hours. -

Passive Simulation of the Nonlinear Port-Hamiltonian Modeling of a Rhodes Piano Antoine Falaize, Thomas Hélie
Passive simulation of the nonlinear port-Hamiltonian modeling of a Rhodes Piano Antoine Falaize, Thomas Hélie To cite this version: Antoine Falaize, Thomas Hélie. Passive simulation of the nonlinear port-Hamiltonian modeling of a Rhodes Piano. 2016. hal-01390534 HAL Id: hal-01390534 https://hal.archives-ouvertes.fr/hal-01390534 Preprint submitted on 2 Nov 2016 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Passive simulation of the nonlinear port-Hamiltonian modeling of a Rhodes Piano Antoine Falaize1,∗, Thomas H´elie1,∗ Project-Team S3 (Sound Signals and Systems) and Analysis/Synthesis team, Laboratory of Sciences and Technologies of Music and Sound (UMR 9912), IRCAM-CNRS-UPMC, 1 place Igor Stravinsky, F-75004 Paris Abstract This paper deals with the time-domain simulation of an electro-mechanical pi- ano: the Fender Rhodes. A simplified description of this multi-physical system is considered. It is composed of a hammer (nonlinear mechanical component), a cantilever beam (linear damped vibrating component) and a pickup (nonlinear magneto-electronic transducer). The approach is to propose a power-balanced formulation of the complete system, from which a guaranteed-passive simulation is derived to generate physically-based realistic sound synthesis. -

Microkorg Owner's Manual
E 2 ii Precautions Data handling Location THE FCC REGULATION WARNING (for U.S.A.) Unexpected malfunctions can result in the loss of memory Using the unit in the following locations can result in a This equipment has been tested and found to comply with the contents. Please be sure to save important data on an external malfunction. limits for a Class B digital device, pursuant to Part 15 of the data filer (storage device). Korg cannot accept any responsibility • In direct sunlight FCC Rules. These limits are designed to provide reasonable for any loss or damage which you may incur as a result of data • Locations of extreme temperature or humidity protection against harmful interference in a residential loss. • Excessively dusty or dirty locations installation. This equipment generates, uses, and can radiate • Locations of excessive vibration radio frequency energy and, if not installed and used in • Close to magnetic fields accordance with the instructions, may cause harmful interference to radio communications. However, there is no Printing conventions in this manual Power supply guarantee that interference will not occur in a particular Please connect the designated AC adapter to an AC outlet of installation. If this equipment does cause harmful interference Knobs and keys printed in BOLD TYPE. the correct voltage. Do not connect it to an AC outlet of to radio or television reception, which can be determined by Knobs and keys on the panel of the microKORG are printed in voltage other than that for which your unit is intended. turning the equipment off and on, the user is encouraged to BOLD TYPE. -

Optical Turntable As an Interface for Musical Performance
Optical Turntable as an Interface for Musical Performance Nikita Pashenkov A.B. Architecture & Urban Planning Princeton University, June 1998 Submitted to the Program in Media Arts and Sciences, School of Architecture and Planning, in partial fulfillment of the requirements for the degree of Master of Science in Media Arts and Sciences at the Massachusetts Institute of Technology June 2002 @ Massachusetts Institute of Technology All rights reserved MASSACHUSETTS INSTITUTE OF TECHNOLOGY JUN 2 7 2002 LIBRARIES ROTCH I|I Author: Nikita Pashenkov Program in Media Arts and Sciences May 24, 2002 Certified by: John Maeda Associate Professor of Design and Computation Thesis Supervisor Accepted by: Dr. Andew B. Lippman Chair, Departmental Committee on Graduate Studies Program | w | in Media Arts and Sciences Optical Turntable as an Interface for Musical Performance Nikita Pashenkov Submitted to the Program in Media Arts and Sciences, School of Architecture and Planning, on May 24, 2002, in partial fulfillment of the requirements for the degree of Master of Science in Media Arts and Sciences Abstract This thesis proposes a model of creative activity on the computer incorporating the elements of programming, graphics, sound generation, and physical interaction. An interface for manipulating these elements is suggested, based on the concept of a disk-jockey turntable as a performance instrument. A system is developed around this idea, enabling optical pickup of visual informa- tion from physical media as input to processes on the computer. Software architecture(s) are discussed and examples are implemented, illustrating the potential uses of the interface for the purpose of creative expression in the virtual domain.