RS-422 and RS-485 Applications Ebook
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
AN706: EZSP-UART Host Interfacing Guide
AN706: EZSP-UART Host Interfacing Guide This application note describes how to connect a Host processor to a Network Co-Processor (NCP) using the UART-based Em- KEY POINTS berZNet Serial Protocol (EZSP). It assumes that you already • EZSP-UART protocol overview have a basic understanding of the EZSP-UART Gateway proto- • Physical interfaces col, as well as the signals needed by the UART interface. If not, • Command line options for Host refer to UG101: UART Gateway Protocol Reference Guide be- applications fore continuing. This application note has been updated to Em- • Hardware design considerations • Powering up, power cycling, and rebooting berZNet PRO 6.6 to reflect a minor update to the Silicon Labs • Bootloading Zigbee application framework, though the content of the EZSP- UART interface still applies to earlier versions of the EmberZNet PRO stack. silabs.com | Building a more connected world. Rev. 1.2 AN706: EZSP-UART Host Interfacing Guide Protocol Overview 1. Protocol Overview Silicon Labs designed EZSP as a protocol to allow communications between components running pieces of the EmberZNet PRO wire- less mesh stack, namely a Host processor and an NCP. The Host processor runs the application layer and executes on the POSIX platform such as Mac OS, Linux, or a Windows PC running Cygwin or the new Windows 10 BASH shell. You can also run this on an embedded platform like the Raspberry Pi. This lets you develop and test your application on an easy-to-use platform before porting your solution to a different Host processor with few changes. The NCP runs the EmberZNet PRO stack and physical layer (PHY). -

RS-485: Still the Most Robust Communication Table of Contents
TUTORIAL RS-485: Still the Most Robust Communication Table of Contents Abstract...........................................................................................................................1 RS-485 vs. RS-422..............................................................................................................................2 An In-Depth Look at RS-485...........................................................................................................3 Challenges of the Industrial Environment.....................................................................................5 Protecting Systems from Harsh Environments.........................................................................5 Conclusion......................................................................................................................10 References......................................................................................................................10 Abstract Despite the rise in popularity of wireless networks, wired serial networks continue to provide the most robust, reliable communication, especially in harsh environments. These well-engineered networks provide effective communication in industrial and building automation applications, which require immunity from noise, electrostatic discharge and voltage faults, all resulting in increased uptime. This tutorial reviews the RS-485 protocol and discusses why it is widely used in industrial applications and the common problems it solves. www.maximintegrated.com -
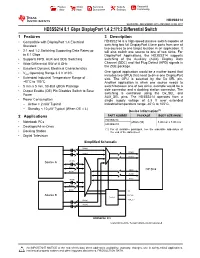
HD3SS214 8.1Gbps Displayport 1.4 2:1/1:2
Product Order Technical Tools & Support & Folder Now Documents Software Community HD3SS214 SLAS907B –DECEMBER 2015–REVISED JUNE 2017 HD3SS214 8.1 Gbps DisplayPort 1.4 2:1/1:2 Differential Switch 1 Features 3 Description HD3SS214 is a high-speed passive switch capable of 1• Compatible with DisplayPort 1.4 Electrical Standard switching two full DisplayPort 4 lane ports from one of two sources to one target location in an application. It • 2:1 and 1:2 Switching Supporting Data Rates up will also switch one source to one of two sinks. For to 8.1 Gbps DisplayPort Applications, the HD3SS214 supports • Supports HPD, AUX and DDC Switching switching of the Auxiliary (AUX), Display Data • Wide Differential BW of 8 GHz Channel (DDC) and Hot Plug Detect (HPD) signals in the ZQE package. • Excellent Dynamic Electrical Characteristics • V Operating Range 3.3 V ±10% One typical application would be a mother board that DD includes two GPUs that need to drive one DisplayPort • Extended Industrial Temperature Range of sink. The GPU is selected by the Dx_SEL pin. -40°C to 105°C Another application is when one source needs to • 5 mm x 5 mm, 50-Ball ųBGA Package switch between one of two sinks, example would be a • Output Enable (OE) Pin Disables Switch to Save side connector and a docking station connector. The Power switching is controlled using the Dx_SEL and AUX_SEL pins. The HD3SS214 operates from a • Power Consumption single supply voltage of 3.3 V over extended – Active < 2 mW Typical industrial temperature range -40°C to 105°C. -

Displayport to TMDS Level Shifting Re-Driver Check for Samples: SN75DP139
SN75DP139 www.ti.com SLLS977D –APRIL 2009–REVISED JULY 2013 DisplayPort to TMDS Level Shifting Re-driver Check for Samples: SN75DP139 1FEATURES • DisplayPort Physical Layer Input Port to TMDS • Enhanced ESD: 10kV on All Pins Physical Layer Output Port • Enhanced Commercial Temperature Range: • Integrated TMDS Level Shifting Re-driver With 0°C to 85°C Receiver Equalization • 48 Pin 7 × 7 QFN (RGZ) Package • Supports Data Rates up to 3.4Gbps • 40 Pin 5 x 5 QFN (RSB) Package • Achieves HDMI 1.4b Compliance • 3D HDMI Support With TMDS Clock Rates up APPLICATIONS to 340MHz • Personal Computer Market • 4k x 2k Operation (30Hz, 24bpp) – DP/TMDS Dongle • Deep Color Supporting 36bpp – Desktop PC • Integrated I2C Logic Block for DVI/HDMI – Notebook PC Connector Recognition – Docking Station 2 • Integrated Active I C Buffer – Standalone Video Card DESCRIPTION The SN75DP139 is a Dual-Mode DisplayPort input to Transition-Minimized Differential Signaling (TMDS) output. The TMDS output has a built in level shifting re-driver supporting Digital Video Interface (DVI) 1.0 and High Definition Multimedia Interface (HDMI) 1.4b standards. The SN75DP139 is specified up to a maximum data rate of 3.4Gbps, supporting resolutions greater then 1920x1200 or HDTV 12 bit color depth at 1080p (progressive scan). SN75DP139 is compliant with the HDMI 1.4b specifications and supports optional protocol enhancements such as 3D graphics at resolutions demanding a pixel rate up to 340MHz. An integrated Active I2C buffer isolates the capacitive loading of the source system from that of the sink and interconnecting cable. This isolation improves overall signal integrity of the system and allows for considerable design margin within the source system for DVI / HDMI compliance testing. -

Introducing Zigbee Theory and Practice Into Information and Computer Technology Disciplines
AC 2007-1072: INTRODUCING ZIGBEE THEORY AND PRACTICE INTO INFORMATION AND COMPUTER TECHNOLOGY DISCIPLINES Crystal Bateman, Brigham Young University Crystal Bateman is an Undergraduate Student at BYU studying Information Technology. Her academic interests include ubiquitous technologies and usability. She is currently finishing an honors thesis on using mobile ZigBee motes in a home environment, and enjoying life with her husband and two daughters Janell Armstrong, Brigham Young University Janell Armstrong is a Graduate Student in Information Technology at BYU. Her interests are in ZigBee and public key infrastructure. She has three years experience as a Teacher's Assistant. Student memberships include IEEE, IEEE-CS, ACM, SWE, ASEE. C. Richard Helps, Brigham Young University Richard Helps is the Program Chair of the Information Technology program at BYU and has been a faculty member in the School of Technology since 1986. His primary scholarly interests are in embedded and real-time computing and in technology education. He also has interests in human-computer interfacing. He has been involved in ABET accreditation for about 8 years and is a Commissioner of CAC-ABET and a CAC accreditation team chair. He spent ten years in industry designing industrial automation systems and in telecommunications. Professional memberships include IEEE, IEEE-CS, ACM, SIGITE, ASEE. Page 12.982.1 Page © American Society for Engineering Education, 2007 Introducing ZigBee Theory and Practice into Information and Computer Technology Disciplines Abstract As pervasive computing turns from the desktop model to the ubiquitous computing ideal, the development challenges become more complex than simply connecting a peripheral to a PC. A pervasive computing system has potentially hundreds of interconnected devices within a small area. -

8130 Remote Terminal Unit
8130 Remote Terminal Unit Collect and transmit data from multiple storage tanks to a central system or host using a single tank gauge interface for inventory, alarm and control. Highlights •Easily expandable through the use of plug‐in interface modules ‐ reduces cost by integrating all analog, digital and serial data inputs and outputs •Multiple host ports ‐ adapts to your needs and redundancy requirements • Supports multiple tank gauge protocols ‐ connect your existing equipment at less cost • Digital and analog I/O connectivity ‐ allows simple tank farm alarm integration •Fully compatible with FuelsManager ‐ tank inventory management made easy • 8130 RTU and gauge configuration data can be exported to other applications, such as Microsoft Excel® or Access® ‐ document all tank gauge equipment Host Communication •Remote configuration of your tank gauges ‐ means less on‐tank The 8130 RTU connects to most types of sensors or actuators on activities, resulting in less personnel risk your site, and to PLCs and DCS computers. It combines with FuelsManager software to provide an extremely cost efficient and FuelsManager® reliable tank inventory system. It also provides fully redundant host ports and is compatible with a variety of other host systems through the industry standard MODBUS™ protocol. Configuration and Programming Remote programming can be accomplished from the host or locally Network using a PC with the Windows‐based configuration program Communications Field ViewRTU. This tool simplifies configuration and diagnostics, Instruments -
I-Modem Command Reference
U.S. Robotics I-modem Command Reference U.S. Robotics I-modem Command Reference page i U.S. Robotics I-modem Command Reference The material contained in this manual is for information purposes only and is subject to change without notice. No part of this document may be reproduced, transmitted, transcribed, or stored in a retrieval system in any form or by any means, mechanical, magnetic, electronic, optical, chemical, or otherwise without the written permission of U.S. Robotics. U.S. Robotics and the U.S. Robotics logo are registered trademarks of U.S. Robotics. Courier, V.Everything, and I-modem are tradmarks of U.S. Robotics. Microsoft and Win- dows NT are registered trademarks of Microsoft Corporation. V.Fast Class and V.FC are trademarks of Rockwell International. MNP is a registered trademark of Microcom Sys- tems, Inc. Any trademarks, trade names, service marks, or service names owned or registered by any other company and used in this manual are the property of their respective companies. U.S. Robotics assumes no responsibility for errors or omissions in this manual. Nor does U.S. Robotics make any commitment to update the information contained herein. ©1997 U.S. Robotics Corp. 8100 N. McCormick Blvd. Skokie, IL 60076-2999 USA page ii U.S. Robotics I-modem Command Reference Table of Contents Chapter 1 Using the AT Command Set 1-1 General Rules for Using AT Commands 1-1 Basic AT Commands 1-2 S-registers 1-3 Chapter 2 Modes of Operation 2-1 Command and Online Modes 2-1 Controlling Local Echo 2-3 Data and Fax Modes 2-5 Chapter 3 Dialing, Answering, and Hanging Up 3-1 Making International Calls 3-7 Call Detection 3-9 page iii U.S. -
13 Embedded Communication Protocols
13 Embedded Communication Protocols Distributed Embedded Systems Philip Koopman October 12, 2015 © Copyright 2000-2015, Philip Koopman Where Are We Now? Where we’ve been: •Design • Distributed system intro • Reviews & process • Testing Where we’re going today: • Intro to embedded networking – If you want to be distributed, you need to have a network! Where we’re going next: • CAN (a representative current network protocol) • Scheduling •… 2 Preview “Serial Bus” = “Embedded Network” = “Multiplexed Wire” ~= “Muxing” = “Bus” Getting Bits onto the wire • Physical interface • Bit encoding Classes of protocols • General operation • Tradeoffs (there is no one “best” protocol) • Wired vs. wireless “High Speed Bus” 3 Linear Network Topology BUS • Good fit to long skinny systems – elevators, assembly lines, etc... • Flexible - many protocol options • Break in the cable splits the bus • May be a poor choice for fiber optics due to problems with splitting/merging • Was prevalent for early desktop systems • Is used for most embedded control networks 4 Star Network Topologies Star • Can emulate bus functions – Easy to detect and isolate failures – Broken wire only affects one node – Good for fiber optics – Requires more wiring; common for Star current desktop systems • Broken hub is catastrophic • Gives a centralized location if needed – Can be good for isolating nodes that generate too much traffic Star topologies increasing in popularity • Bus topology has startup problems in some fault scenarios • Safety critical control networks moving -

Survey of Important Issues in UAV Communications Networks
1 Survey of Important Issues in UAV Communication Networks Lav Gupta*, Senior Member IEEE, Raj Jain, Fellow, IEEE, and Gabor Vaszkun technology that can be harnessed for military, public and civil Abstract—Unmanned Aerial Vehicles (UAVs) have enormous applications. Military use of UAVs is more than 25 years old potential in the public and civil domains. These are particularly primarily consisting of border surveillance, reconnaissance and useful in applications where human lives would otherwise be strike. Public use is by the public agencies such as police, endangered. Multi-UAV systems can collaboratively complete missions more efficiently and economically as compared to single public safety and transportation management. UAVs can UAV systems. However, there are many issues to be resolved provide timely disaster warnings and assist in speeding up before effective use of UAVs can be made to provide stable and rescue and recovery operations when the public communication reliable context-specific networks. Much of the work carried out in network gets crippled. They can carry medical supplies to areas the areas of Mobile Ad Hoc Networks (MANETs), and Vehicular rendered inaccessible. In situations like poisonous gas Ad Hoc Networks (VANETs) does not address the unique infiltration, wildfires and wild animal tracking UAVs could be characteristics of the UAV networks. UAV networks may vary from slow dynamic to dynamic; have intermittent links and fluid used to quickly envelope a large area without risking the safety topology. While it is believed that ad hoc mesh network would be of the personnel involved. most suitable for UAV networks yet the architecture of multi-UAV UAVs come networks has been an understudied area. -

Remote Terminal Unit ENCS-3M
Remote terminal unit ENCS-3m Manual ENCS.403500.001. Rev 3.2016 Table of contents Table of contents Introduction .................................................................................................. 3 Glossary .................................................................................................... 4 1 General information .......................................................................... 5 2 Design, dimension, naming convention ..................................................... 6 3 Features ......................................................................................... 8 3.1 Device poll and sync time ............................................................. 8 3.2 Telecontrol .............................................................................. 8 3.3 Spontaneous transmission ............................................................. 8 3.4 Cyclic transmission ..................................................................... 8 3.5 Background scan ........................................................................ 8 3.6 IEC 60870-5-101–2006 and IEC 60870-5-104-2004 support ........................ 8 3.7 GOOSE (IEC 61850 8-1) ................................................................. 9 3.8 Configuration ............................................................................ 9 4 Specification .................................................................................. 10 4.1 Interfaces ............................................................................. -

PCI20EX PCI Express (Pcie)
PCI20EX PCI Express (PCIe) Bus ARCNET® Network Interface Modules INSTALLATION GUIDE INTRODUCTION The PCI20EX series of ARCNET network interface modules (NIMs) links PCI Express (PCIe) bus compatible computers with the ARCNET local area network (LAN). Since most PC motherboards have migrated from the legacy PCI and PCI-X Bus, a PCI Express style NIM is required. The PCI20EX series is compliant to the PCI Express Card Electromechanical Specification Revision 2.0 and both standard height and low-profile brackets are provided. The PCI Express interface allows for jumperless configuration and Plug and Play operation. The module operates with either an NDIS driver or a null stack driver in a Windows® environment. The PCI20EX incorporates the COM20022 ARCNET controller chip with enhanced features over the earlier generation ARCNET chips. New features include command chaining, sequential access to internal RAM, duplicate node ID detection and variable data rates up to 10 Mbps. Bus contention problems are minimized since the module’s interrupt and I/O base address are assigned through Plug and Play. The PCI20EX exploits the new features of the COM20022 which includes 10 Mbps communications utilizing the various EIA-485 transceiver options. Each PCI20EX module has two LEDs on the board for monitoring network operation and bus access to the module. It is equipped with an 8 position, general purpose DIP switch typically used to assign the ARCNET node address. Ultimately, the node address is configured via software so the DIP switch can also indicate user-defined functions such as data rate, cable interface, or master/slave status of the system. -

Datasheet for Onenand Power Ramp and Stabilization Times and for Onenand Boot Copy Times
TMS320DM365 www.ti.com SPRS457E–MARCH 2009–REVISED JUNE 2011 TMS320DM365 Digital Media System-on-Chip (DMSoC) Check for Samples: TMS320DM365 1 TMS320DM365 Digital Media System-on-Chip (DMSoC) 1.1 Features 12 • Highlights – Support for 32-Bit and 16-Bit – High-Performance Digital Media (Thumb® Mode) Instruction Sets System-on-Chip (DMSoC) – DSP Instruction Extensions and Single Cycle – Up to 300-MHz ARM926EJ-S Clock Rate MAC – Two Video Image Co-processors – ARM® Jazelle® Technology (HDVICP, MJCP) Engines – Embedded ICE-RT Logic for Real-Time – Supports a Range of Encode, Decode, and Debug Video Quality Operations • ARM9 Memory Architecture – Video Processing Subsystem – 16K-Byte Instruction Cache • HW Face Detect Engine – 8K-Byte Data Cache • Resize Engine from 1/16x to 8x – 32K-Byte RAM • 16-Bit Parallel AFE (Analog Front-End) – 16K-Byte ROM Interface Up to 120 MHz – Little Endian • 4:2:2 (8-/16-bit) Interface • Two Video Image Co-processors • 8-/16-bit YCC and Up to 24-Bit RGB888 (HDVICP, MJCP) Engines Digital Output – Support a Range of Encode and Decode • 3 DACs for HD Analog Video Output Operations, up to D1 on 216-MHz device and • Hardware On-Screen Display (OSD) up to 720p on the 270- and 300-MHz parts – Capable of 720p 30fps H.264 video – H.264, MPEG4, MPEG2, MJPEG, JPEG, processing WMV9/VC1 Note: 216-MHz is only capable of D1 • Video Processing Subsystem processing – Front End Provides: – Peripherals include EMAC, USB 2.0 OTG, • HW Face Detect Engine DDR2/NAND, 5 SPIs, 2 UARTs, 2 • Hardware IPIPE for Real-Time Image MMC/SD/SDIO,