Application of Dynamic Programming for the Analysis of Complex Water Resources Systems
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Fit.* IRRIGATION and MULTI-PURPOSE DEVELOPMENT
fit.* The Historic Jaya Ganga — built by King Dbatustna in tbi <>tb century AD to carry the waters of the Kala Wewa to the ancient city tanks of Anuradbapura, 57 miles away, while feeding a number of village tanks in its course. This channel is also famous for the gentle gradient of 6 ins. per mile for the first I7 miles and an average of 1 //. per mile throughout its length. Both tbeKalawewa andtbefiya Garga were restored in 1885 — 18 8 8 by the British, but not to their fullest capacities. New under the Mabaweli Diversion project, the Kill Wewa his been augmented and the Jaya Gingi improved to carry 1000 cusecs of water. The history of our country dates back to the 6th century B.C. When the legendary Vijaya landed in L->nka, he is believed to have found an island occupied by certain tribes who had already developed a rudimentary sys tem of irrigation. Tradition has it that Kuveni was spinning cotton on the bund of a small lake which was presumably part of this ancient system. The development of an ancient civilization which was entirely depen dent on an irrigation system that grew in size and complexity through the years is described in our written history. Many examples are available which demonstrate this systematic development of water and land re sources throughout the so-called dry zone of our country over very long periods of time. The development of a water supply and irrigation system around the city of Anuradhapuia may be taken as an example. -

Environmental Assessment Report Sri Lanka
Environmental Assessment Report Initial Environmental Examination – Provincial Roads Component: Mannar–Vavuniya District Project Number: 42254 May 2010 Sri Lanka: Northern Road Connectivity Project Prepared by [Author(s)] [Firm] [City, Country] Prepared by the Ministry of Local Govern ment and Provincial Councils for th e Asian Development Bank (ADB). Prepared for [Executing Agency] [Implementi ng Agency] The initial environmental examination is a document of the borrower. The views expressed herein do not necessarily represent those of AD B’s Board of Di rectors, Management, or staff, and may be preliminary The views expressed herein are those of the consultant and do not necessarily represent those of ADB’s in nature. members, Board of Directors, Management, or staff, and may be preliminary in nature. LIST OF ABBREVIATIONS ADB - Asian Development Bank BIQ - Basic Information Questionnaire CCD - Coast Conservation Department CEA - Central Environmental Authority CEB - Ceylon Electricity Board CSC - Consultant Supervision Consultant DBST - Double Bituminous Surface Treatment DCS - Department of Census and Statistics DoF - Department of Forestry DoI - Department of Irrigation DoS - Department of Survey DSD - Divisional Secretariat Division DWLC - Department of Wild Life Conservation EA - Executive Agency EMP - Environmental Management Plan EMo - Environmental Monitoring Plan EPL - Environment Protection Liaison ESCM - Environmental Safeguards Compliance Manual GND - Grama Niladhari Division GoSL - Government of Sri Lanka GSMB - Geological -

Integrated Strategic Environmental Assessment of the Northern Province of Sri Lanka Report
Integrated Strategic Environmental Assessment of the Northern Province of Sri Lanka A multi-agency approach coordinated by Central Environment Authority and Disaster Management Centre, Supported by United Nations Development Programme and United Nations Environment Programme Integrated Strategic Environmental Assessment of the Northern Province of Sri Lanka November 2014 A Multi-agency approach coordinated by the Central Environmental Authority (CEA) of the Ministry of Environment and Renewable Energy and Disaster Management Centre (DMC) of the Ministry of Disaster Management, supported by United Nations Development Programme (UNDP) and United Nations Environment Programme (UNEP) Integrated Strategic Environment Assessment of the Northern Province of Sri Lanka ISBN number: 978-955-9012-55-9 First edition: November 2014 © Editors: Dr. Ananda Mallawatantri Prof. Buddhi Marambe Dr. Connor Skehan Published by: Central Environment Authority 104, Parisara Piyasa, Battaramulla Sri Lanka Disaster Management Centre No 2, Vidya Mawatha, Colombo 7 Sri Lanka Related publication: Map Atlas: ISEA-North ii Message from the Hon. Minister of Environment and Renewable Energy Strategic Environmental Assessment (SEA) is a systematic decision support process, aiming to ensure that due consideration is given to environmental and other sustainability aspects during the development of plans, policies and programmes. SEA is widely used in many countries as an aid to strategic decision making. In May 2006, the Cabinet of Ministers approved a Cabinet of Memorandum -

Water Balance Variability Across Sri Lanka for Assessing Agricultural and Environmental Water Use W.G.M
Agricultural Water Management 58 (2003) 171±192 Water balance variability across Sri Lanka for assessing agricultural and environmental water use W.G.M. Bastiaanssena,*, L. Chandrapalab aInternational Water Management Institute (IWMI), P.O. Box 2075, Colombo, Sri Lanka bDepartment of Meteorology, 383 Bauddaloka Mawatha, Colombo 7, Sri Lanka Abstract This paper describes a new procedure for hydrological data collection and assessment of agricultural and environmental water use using public domain satellite data. The variability of the annual water balance for Sri Lanka is estimated using observed rainfall and remotely sensed actual evaporation rates at a 1 km grid resolution. The Surface Energy Balance Algorithm for Land (SEBAL) has been used to assess the actual evaporation and storage changes in the root zone on a 10- day basis. The water balance was closed with a runoff component and a remainder term. Evaporation and runoff estimates were veri®ed against ground measurements using scintillometry and gauge readings respectively. The annual water balance for each of the 103 river basins of Sri Lanka is presented. The remainder term appeared to be less than 10% of the rainfall, which implies that the water balance is suf®ciently understood for policy and decision making. Access to water balance data is necessary as input into water accounting procedures, which simply describe the water status in hydrological systems (e.g. nation wide, river basin, irrigation scheme). The results show that the irrigation sector uses not more than 7% of the net water in¯ow. The total agricultural water use and the environmental systems usage is 15 and 51%, respectively of the net water in¯ow. -
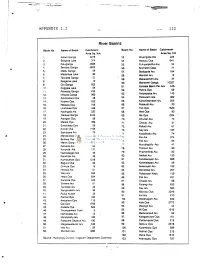
River Basins
APPENDIX I.I 122 River Basins Basin No Name of Basin Catchment Basin No. Name of Basin Catchment Area Sq. Km. Area Sq. Km 1. Kelani Ganga 2278 53. Miyangolla Ela 225 2. Bolgoda Lake 374 54. Maduru Oya 1541 3. Kaluganga 2688 55. Pulliyanpotha Aru 52 4. Bemota Ganga 6622 56. Kirimechi Odai 77 5. Madu Ganga 59 57. Bodigoda Aru 164 6. Madampe Lake 90 58. Mandan Aru 13 7. Telwatte Ganga 51 59. Makarachchi Aru 37 8. Ratgama Lake 10 60. Mahaweli Ganga 10327 9. Gin Ganga 922 61. Kantalai Basin Per Ara 445- 10. Koggala Lake 64 62. Panna Oya 69 11. Polwatta Ganga 233 12. Nilwala Ganga 960 63. Palampotta Aru 143 13. Sinimodara Oya 38 64. Pankulam Ara 382 14. Kirama Oya 223 65. Kanchikamban Aru 205 15. Rekawa Oya 755 66. Palakutti A/u 20 16. Uruhokke Oya 348 67. Yan Oya 1520 17. Kachigala Ara 220 68. Mee Oya 90 18. Walawe Ganga 2442 69. Ma Oya 1024 19. Karagan Oya 58 70. Churian A/u 74 20. Malala Oya 399 71. Chavar Aru 31 21. Embilikala Oya 59 72. Palladi Aru 61 22. Kirindi Oya 1165 73. Nay Ara 187 23. Bambawe Ara 79 74. Kodalikallu Aru 74 24. Mahasilawa Oya 13 75. Per Ara 374 25. Butawa Oya 38 76. Pali Aru 84 26. Menik Ganga 1272 27. Katupila Aru 86 77. Muruthapilly Aru 41 28. Kuranda Ara 131 78. Thoravi! Aru 90 29. Namadagas Ara 46 79. Piramenthal Aru 82 30. Karambe Ara 46 80. Nethali Aru 120 31. -

Democratic Socialist Republic of Sri Lanka the Project for Development
MINISTRY OF ECONOMIC DEVELOPMENT DEMOCRATIC SOCIALIST REPUBLIC OF SRI LANKA Democratic Socialist Republic of Sri Lanka The Project for Development Planning for the Urgent Rehabilitation of the Resettlement Community in Mannar District FINAL REPORT MAY 2012 Japan International Cooperation Agency M&Y Consultants Co., Ltd. Nippon Koei Co., Ltd. EID JR 12 – 116 6 C:??G: , + 9 982 4,63, 6 0 Wbggnb , / 40106/ 5 1 + 6FGI@?GE 7GFKAE=? ,G?; DBEBGH<A<AB 3 Xjljnodidij -FG>?G <?IL??E 7GFKAE=? Zsllbjrrjts FLEE:BKBML -FG>?G <?IL??E /AHIGA=I Zbllbtj 5;AE 8F;> 4F=;C 8F;> Zbnnbq M:MLGBO: F:GG:J \mbnrbj 1830 60 abtsnjvb 4+55+7 KJBG<HF:E>> `qjndomblff Qnsqbeibpsqb :GLJ:=A:ILJ: 2 5 ILKK:E:F IHEHGG:JLN: . 2 ]srrblbm + 5 ;:KKB<:EH: Rbrrjdblob 6 DLJLG>@:E: - F:K:E> / + Xsqsnfhblb Zbrblf 5 D:G=O Qmpbqb Xfhbllb Xbnev @:FI:A: :FI:J: D>@:EE> Ubmpbni GLN:J: ;:=LEE: >EBO: Rbesllb 5 S\Y\ZR\ + [subqb / <HEHF;H Tljvb Zonbqbhblb - FHG:J:@:E: ^brnbpsqb 6 5 Xblsrbqb J:KG:ILJ: D:ELK:J: + 2 . 5 2 A:F;:GKHK: @:EE> F:K:J: Vbmcbnrorb Ubllf {|{}{~{*{ +{BD Zbrbqb QNMPO Qqfb Zbp og rif [oqrifqn ]qotjndf jn _qj Ybnkb 5x: .FEHJCI;EIH .Fzy 4I>z l 0<C<@A8;8;< -<DEC<8E 5;:=7?BF99< 6:>>7@=F>7? 47>< +CF 1F@97?B<99< 5<=7>< 57>7<?7@@7C 4<:C 1F>7<EE<GF -<DEC<8E 57>7<?7@@7C />FBB7A==797G7< 0FCF@E;7@=F>7? Qh```^g^ZX` 07@@799< 07C<D7> 4:D7>7< 57I><7@=F9<I<CFBBF +EE<?A997< 0A?BFEF==< 279F==F97 .CF==<>7?B<99< 3>7<EEA9FH7< 5A997G:>< 0AI<E=F>7? 17><G79< 6<97EE7>E<GF 57C7==FF@9F SX``XaXZh QXbbXe 57>GFB79F 4:C<I7?79F 0F>7? SXddXacZZX^ 4:C<I7?79F U]^eh_[g]^jXeXa QXbgcgX LZXadXb QXbgX^ UX``XZ^ PXi^`XbiXZZXg]X`ih -

List of Rivers of Sri Lanka
Sl. No Name Length Source Drainage Location of mouth (Mahaweli River 335 km (208 mi) Kotmale Trincomalee 08°27′34″N 81°13′46″E / 8.45944°N 81.22944°E / 8.45944; 81.22944 (Mahaweli River 1 (Malvathu River 164 km (102 mi) Dambulla Vankalai 08°48′08″N 79°55′40″E / 8.80222°N 79.92778°E / 8.80222; 79.92778 (Malvathu River 2 (Kala Oya 148 km (92 mi) Dambulla Wilpattu 08°17′41″N 79°50′23″E / 8.29472°N 79.83972°E / 8.29472; 79.83972 (Kala Oya 3 (Kelani River 145 km (90 mi) Horton Plains Colombo 06°58′44″N 79°52′12″E / 6.97889°N 79.87000°E / 6.97889; 79.87000 (Kelani River 4 (Yan Oya 142 km (88 mi) Ritigala Pulmoddai 08°55′04″N 81°00′58″E / 8.91778°N 81.01611°E / 8.91778; 81.01611 (Yan Oya 5 (Deduru Oya 142 km (88 mi) Kurunegala Chilaw 07°36′50″N 79°48′12″E / 7.61389°N 79.80333°E / 7.61389; 79.80333 (Deduru Oya 6 (Walawe River 138 km (86 mi) Balangoda Ambalantota 06°06′19″N 81°00′57″E / 6.10528°N 81.01583°E / 6.10528; 81.01583 (Walawe River 7 (Maduru Oya 135 km (84 mi) Maduru Oya Kalkudah 07°56′24″N 81°33′05″E / 7.94000°N 81.55139°E / 7.94000; 81.55139 (Maduru Oya 8 (Maha Oya 134 km (83 mi) Hakurugammana Negombo 07°16′21″N 79°50′34″E / 7.27250°N 79.84278°E / 7.27250; 79.84278 (Maha Oya 9 (Kalu Ganga 129 km (80 mi) Adam's Peak Kalutara 06°34′10″N 79°57′44″E / 6.56944°N 79.96222°E / 6.56944; 79.96222 (Kalu Ganga 10 (Kirindi Oya 117 km (73 mi) Bandarawela Bundala 06°11′39″N 81°17′34″E / 6.19417°N 81.29278°E / 6.19417; 81.29278 (Kirindi Oya 11 (Kumbukkan Oya 116 km (72 mi) Dombagahawela Arugam Bay 06°48′36″N -

NATURAL RESOURCES of SRI LANKA Conditions and Trends
822 LK91 NATURAL RESOURCES OF SRI LANKA Conditions and Trends A REPORT PREPARED FOR THE NATURAL RESOURCES, ENERGY AND SCIENCE AUTHO Sponsored by the United States Agency for International Development NATURAL RESOURCES OF SRI LANKA Conditions and Trends LIBRARY : . INTERNATIONAL REFERENCE CENTRE FOR COMMUNITY WATER SUPPLY AND SANITATION (IRQ LIBRARY, INTERNATIONAL h'L'FERi "NO1£ CEiJRE FOR Ct)MV.u•;•!!rY WATEri SUPPLY AND SALTATION .(IRC) P.O. Box 93H)0. 2509 AD The hi,: Tel. (070) 814911 ext 141/142 RN: lM O^U LO: O jj , i/q i A REPORT PREPARED FOR THE NATURAL RESOURCES, ENERGY AND SCIENCE AUTHORITY OF SRI LANKA. 1991 Editorial Committee Other Contributors Prof. B.A. Abeywickrama Prof.P. Abeygunawardenc Mr. Malcolm F. Baldwin Dr. A.T.P.L. Abeykoon Mr. Malcolm A.B. Jansen Prof. P, Ashton Prof. CM. Madduma Bandara Mr. (J.B.A. Fernando Mr. L.C.A. de S. Wijesinghc Mr. P. Illangovan Major Contributors Dr. R.C. Kumarasuriya Prof. B.A. Abcywickrama Mr. V. Nandakumar Dr. B.K. Basnayake Dr.R.H. Wickramasinghe Ms. N.D. de Zoysa Dr. Kristin Wulfsberg Mr. S. Dimantha Prof. C.B. Dissanayake Prof. H.P.M. Gunasena Editor Mr. Malcolm F. Baldwin Mr. Malcolm A.B, Jansen Copy Editor Ms Pamela Fabian Mr. R.B.M. Koralc Word - Prof. CM. Madduma Bandara Processing Ms Pushpa Iranganie Ms Beryl Mcldcr Mr. K.A.L. Premaratne Cartography Mr. Milton Liyanage Ms D.H. Sadacharan Photography Studio Times, Ltd. Dr. L.R. Sally Mr. Dharmin Samarajeewa Dr. M.U.A. Tcnnekoon Mr. Dominic Sansoni Mr. -

Feasibility Study GREEN CLIMATE FUND FUNDING PROPOSAL I
Annex II – Feasibility Study GREEN CLIMATE FUND FUNDING PROPOSAL I Feasibility Study i Annex II – Feasibility Study GREEN CLIMATE FUND FUNDING PROPOSAL I Technical Feasibility Report Strengthening the resilience of smallholder farmers in the Dry Zone to climate variability and extreme events through an integrated approach to water management ii Annex II – Feasibility Study GREEN CLIMATE FUND FUNDING PROPOSAL I Forward Sri Lanka is a country highly vulnerable to climate change. As with many countries around the world, the country has experienced the impact of rising temperatures and erratic rainfall patterns associated with prolonged droughts and floods, respectively. In response to this situation, Sri Lanka has played an active role in climate change adaptation activities, both locally and globally. The Framework Convention on Climate Change was ratified by Sri Lanka in 1993, and action was taken to ratify Kyoto Protocol and establish a Climate Change Secretariat. Other actions include formulation of national policies, strategic plans and strategies including a National Adaptation Plan (NAP) for Climate Change Impacts in 2015. Intended Nationally Determined Contributions (INDCs) of Sri Lanka were developed in 2015. Over the last few years, Sri Lanka has received a limited amount of adaptation finance from existing global vertical funds including the Special Climate Change Fund and Adaptation Fund. A large proportion of Sri Lankans are dependent on livelihoods connected to agriculture. Substantial investments in irrigation and agriculture, especially in the Dry Zone, have made the country self-sufficient in rice. However, the Dry Zone extending over 60% of the land, is heavily impacted by climate change. The loss of production from climate-related hazards affects mostly farmers with small land holdings, and undermines domestic food security as well as livelihood opportunities. -

Sri Lanka: DRY ZONE URBAN WATER and SANITATION PROJECT - for Vavuniya Per Aru Reservoir
Environment Impact Assessment Report Project Number: 37381-013 November 2012 Sri Lanka: DRY ZONE URBAN WATER AND SANITATION PROJECT - for Vavuniya Per Aru Reservoir Prepared by Project Management Unit for Dry Zone Urban Water and Sanitation Project, Colombo, Sri Lanka. For Water Supply and Drainage Board Ministry of Water Supply and Drainage, Sri Lanka. This report has been submitted to ADB by the Ministry of Water Supply and Drainage and is made publicly available in accordance with ADB’s public communications policy (20011). It does not necessarily reflect the views of ADB. THE DEMOCRATIC SOCIALIST REPUBLIC OF SRI LANKA MINISTRY OF WATER SUPPLY AND DRAINAGE NATIONAL WATER SUPPLY AND DRAINAGE BOARD ENVIRONMENTAL IMPACT ASSESSMENT ON THE PROPOSED SURFACE WATER EXTRACTION FROM A RESERVOIR ACROSS PER ARU VAVUNIYA DISTRICT November 2012 National Water Supply and Drainage Board EIA Study of the Per Aru Reservoir ABBREVIATIONS ADB = Asian Development Bank APs = Affected People BCR = Benefit Cost Ratio BOD = Biological Oxygen Demand BOP = Blocking out Plans CBO = Community Based Organization COD = Chemical Oxygen Demand DCSMS = Design, Construction, Supervision and Management Support DFC = Department of Forest Conservation DFO = Divisional Forest Officer DOA = Department of Agriculture DS = Divisional Secretary DWC = Department of Wildlife Conservation DZ = Dry Zone EC = Electrical Conductivity EMU = Environmental Management Unit FD = Forest Department FOs = Farmer Organizations FR = Forest Reserve FSL = Full Supply Level GA = Government Agent -

An Overall Assessment of the Agricultural Marketing Systems in Northern Province of Sri Lanka
An Overall Assessment of the Agricultural Marketing Systems in Northern Province of Sri Lanka T.A. Dharmaratne Research Report No: 169 June 2014 Hector Kobbekaduwa Agrarian Research and Training Institute 114, Wijerama Mawatha Colombo 7 Sri Lanka I First Published: June 2014 © 2014, Hector Kobbekaduwa Agrarian Research and Training Institute Coverpage Designed by: Udeni Karunaratne Final typesetting and lay-out by: Dilanthi Hewavitharana ISBN: 978-955-612-169-8 II FOREWORD One of the major challenges that need to be taken into consideration in terms of agricultural development in the Northern Province is “reconstruction of the suitable agricultural marketing systems. For restoration of the agricultural marketing systems, the policy makers do not have adequate proper information about the agricultural marketing systems as well as obstacles facing the market forces in the province. Therefore, they cannot identify the essential government complimentary role in promoting agricultural markets in the region. A survey on agricultural marketing systems helpful in identify the current agricultural marketing systems and weaknesses of the existing market structures of the province. In that senses, the overall objective of the survey is to undertake a market study aimed at generating information that would enable the authorities to gain understanding of the existing agricultural marketing systems, institutional arrangements and their management and operating procedures, covering the major players in respect of production and marketing of major agricultural commodities and to propose strategies to improve the efficiency of the marketing mechanisms in the north region of Sri Lanka. This study has made an effort to investigate agricultural marketing system in the Northern Province. -

World Bank Document
INTEGRATED SAFEGUARDS DATASHEET APPRAISAL STAGE I. Basic Information Date prepared/updated: 11/22/2009 Report No.: AC4740 Public Disclosure Authorized 1. Basic Project Data Country: Sri Lanka Project ID: P118870 Project Name: Sri Lanka: Emergency Northern Recovery Project Task Team Leader: Nihal Fernando Estimated Appraisal Date: November 25, Estimated Board Date: December 17, 2009 2009 Managing Unit: SASDA Lending Instrument: Emergency Recovery Loan Sector: Irrigation and drainage (60%);Water supply (15%);Roads and highways (15%);General agriculture, fishing and forestry sector (10%) Theme: Conflict prevention and post-conflict reconstruction (100%) IBRD Amount (US$m.): 0.00 Public Disclosure Authorized IDA Amount (US$m.): 65.00 GEF Amount (US$m.): 0.00 PCF Amount (US$m.): 0.00 Other financing amounts by source: BORROWER/RECIPIENT 0.00 0.00 Environmental Category: B - Partial Assessment Simplified Processing Simple [] Repeater [] Is this project processed under OP 8.50 (Emergency Recovery) Yes [X] No [ ] or OP 8.00 (Rapid Response to Crises and Emergencies) Public Disclosure Authorized 2. Project Objectives The Project Development Objective (PDO) is #to support the Government of Sri Lanka#s efforts to rapidly resettle the IDPs in the Northern Province#. It will be achieved through: (A) Emergency Assistance to IDPs; (B) a Work-fare Program; (C) Rehabilitation and Reconstruction of Essential Public and Economic Infrastructure; and (D) Project Management Support. 3. Project Description Component A: (Emergency Assistance to IDPs) would be