A Course in .. . APPLIED BIFURCATION THEORY
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Synchronization of Chaotic Systems
Synchronization of chaotic systems Cite as: Chaos 25, 097611 (2015); https://doi.org/10.1063/1.4917383 Submitted: 08 January 2015 . Accepted: 18 March 2015 . Published Online: 16 April 2015 Louis M. Pecora, and Thomas L. Carroll ARTICLES YOU MAY BE INTERESTED IN Nonlinear time-series analysis revisited Chaos: An Interdisciplinary Journal of Nonlinear Science 25, 097610 (2015); https:// doi.org/10.1063/1.4917289 Using machine learning to replicate chaotic attractors and calculate Lyapunov exponents from data Chaos: An Interdisciplinary Journal of Nonlinear Science 27, 121102 (2017); https:// doi.org/10.1063/1.5010300 Attractor reconstruction by machine learning Chaos: An Interdisciplinary Journal of Nonlinear Science 28, 061104 (2018); https:// doi.org/10.1063/1.5039508 Chaos 25, 097611 (2015); https://doi.org/10.1063/1.4917383 25, 097611 © 2015 Author(s). CHAOS 25, 097611 (2015) Synchronization of chaotic systems Louis M. Pecora and Thomas L. Carroll U.S. Naval Research Laboratory, Washington, District of Columbia 20375, USA (Received 8 January 2015; accepted 18 March 2015; published online 16 April 2015) We review some of the history and early work in the area of synchronization in chaotic systems. We start with our own discovery of the phenomenon, but go on to establish the historical timeline of this topic back to the earliest known paper. The topic of synchronization of chaotic systems has always been intriguing, since chaotic systems are known to resist synchronization because of their positive Lyapunov exponents. The convergence of the two systems to identical trajectories is a surprise. We show how people originally thought about this process and how the concept of synchronization changed over the years to a more geometric view using synchronization manifolds. -

Solution Bounds, Stability and Attractors' Estimates of Some Nonlinear Time-Varying Systems
1 Solution Bounds, Stability and Attractors’ Estimates of Some Nonlinear Time-Varying Systems Mark A. Pinsky and Steve Koblik Abstract. Estimation of solution norms and stability for time-dependent nonlinear systems is ubiquitous in numerous applied and control problems. Yet, practically valuable results are rare in this area. This paper develops a novel approach, which bounds the solution norms, derives the corresponding stability criteria, and estimates the trapping/stability regions for a broad class of the corresponding systems. Our inferences rest on deriving a scalar differential inequality for the norms of solutions to the initial systems. Utility of the Lipschitz inequality linearizes the associated auxiliary differential equation and yields both the upper bounds for the norms of solutions and the relevant stability criteria. To refine these inferences, we introduce a nonlinear extension of the Lipschitz inequality, which improves the developed bounds and estimates the stability basins and trapping regions for the corresponding systems. Finally, we conform the theoretical results in representative simulations. Key Words. Comparison principle, Lipschitz condition, stability criteria, trapping/stability regions, solution bounds AMS subject classification. 34A34, 34C11, 34C29, 34C41, 34D08, 34D10, 34D20, 34D45 1. INTRODUCTION. We are going to study a system defined by the equation n (1) xAtxftxFttt , , [0 , ), x , ft ,0 0 where matrix A nn and functions ft:[ , ) nn and F : n are continuous and bounded, and At is also continuously differentiable. It is assumed that the solution, x t, x0 , to the initial value problem, x t0, x 0 x 0 , is uniquely defined for tt0 . Note that the pertained conditions can be found, e.g., in [1] and [2]. -

Strange Attractors and Classical Stability Theory
Nonlinear Dynamics and Systems Theory, 8 (1) (2008) 49–96 Strange Attractors and Classical Stability Theory G. Leonov ∗ St. Petersburg State University Universitetskaya av., 28, Petrodvorets, 198504 St.Petersburg, Russia Received: November 16, 2006; Revised: December 15, 2007 Abstract: Definitions of global attractor, B-attractor and weak attractor are introduced. Relationships between Lyapunov stability, Poincare stability and Zhukovsky stability are considered. Perron effects are discussed. Stability and instability criteria by the first approximation are obtained. Lyapunov direct method in dimension theory is introduced. For the Lorenz system necessary and sufficient conditions of existence of homoclinic trajectories are obtained. Keywords: Attractor, instability, Lyapunov exponent, stability, Poincar´esection, Hausdorff dimension, Lorenz system, homoclinic bifurcation. Mathematics Subject Classification (2000): 34C28, 34D45, 34D20. 1 Introduction In almost any solid survey or book on chaotic dynamics, one encounters notions from classical stability theory such as Lyapunov exponent and characteristic exponent. But the effect of sign inversion in the characteristic exponent during linearization is seldom mentioned. This effect was discovered by Oscar Perron [1], an outstanding German math- ematician. The present survey sets forth Perron’s results and their further development, see [2]–[4]. It is shown that Perron effects may occur on the boundaries of a flow of solutions that is stable by the first approximation. Inside the flow, stability is completely determined by the negativeness of the characteristic exponents of linearized systems. It is often said that the defining property of strange attractors is the sensitivity of their trajectories with respect to the initial data. But how is this property connected with the classical notions of instability? For continuous systems, it was necessary to remember the almost forgotten notion of Zhukovsky instability. -

Chapter 8 Stability Theory
Chapter 8 Stability theory We discuss properties of solutions of a first order two dimensional system, and stability theory for a special class of linear systems. We denote the independent variable by ‘t’ in place of ‘x’, and x,y denote dependent variables. Let I ⊆ R be an interval, and Ω ⊆ R2 be a domain. Let us consider the system dx = F (t, x, y), dt (8.1) dy = G(t, x, y), dt where the functions are defined on I × Ω, and are locally Lipschitz w.r.t. variable (x, y) ∈ Ω. Definition 8.1 (Autonomous system) A system of ODE having the form (8.1) is called an autonomous system if the functions F (t, x, y) and G(t, x, y) are constant w.r.t. variable t. That is, dx = F (x, y), dt (8.2) dy = G(x, y), dt Definition 8.2 A point (x0, y0) ∈ Ω is said to be a critical point of the autonomous system (8.2) if F (x0, y0) = G(x0, y0) = 0. (8.3) A critical point is also called an equilibrium point, a rest point. Definition 8.3 Let (x(t), y(t)) be a solution of a two-dimensional (planar) autonomous system (8.2). The trace of (x(t), y(t)) as t varies is a curve in the plane. This curve is called trajectory. Remark 8.4 (On solutions of autonomous systems) (i) Two different solutions may represent the same trajectory. For, (1) If (x1(t), y1(t)) defined on an interval J is a solution of the autonomous system (8.2), then the pair of functions (x2(t), y2(t)) defined by (x2(t), y2(t)) := (x1(t − s), y1(t − s)), for t ∈ s + J (8.4) is a solution on interval s + J, for every arbitrary but fixed s ∈ R. -

Role of Nonlinear Dynamics and Chaos in Applied Sciences
v.;.;.:.:.:.;.;.^ ROLE OF NONLINEAR DYNAMICS AND CHAOS IN APPLIED SCIENCES by Quissan V. Lawande and Nirupam Maiti Theoretical Physics Oivisipn 2000 Please be aware that all of the Missing Pages in this document were originally blank pages BARC/2OOO/E/OO3 GOVERNMENT OF INDIA ATOMIC ENERGY COMMISSION ROLE OF NONLINEAR DYNAMICS AND CHAOS IN APPLIED SCIENCES by Quissan V. Lawande and Nirupam Maiti Theoretical Physics Division BHABHA ATOMIC RESEARCH CENTRE MUMBAI, INDIA 2000 BARC/2000/E/003 BIBLIOGRAPHIC DESCRIPTION SHEET FOR TECHNICAL REPORT (as per IS : 9400 - 1980) 01 Security classification: Unclassified • 02 Distribution: External 03 Report status: New 04 Series: BARC External • 05 Report type: Technical Report 06 Report No. : BARC/2000/E/003 07 Part No. or Volume No. : 08 Contract No.: 10 Title and subtitle: Role of nonlinear dynamics and chaos in applied sciences 11 Collation: 111 p., figs., ills. 13 Project No. : 20 Personal authors): Quissan V. Lawande; Nirupam Maiti 21 Affiliation ofauthor(s): Theoretical Physics Division, Bhabha Atomic Research Centre, Mumbai 22 Corporate authoifs): Bhabha Atomic Research Centre, Mumbai - 400 085 23 Originating unit : Theoretical Physics Division, BARC, Mumbai 24 Sponsors) Name: Department of Atomic Energy Type: Government Contd...(ii) -l- 30 Date of submission: January 2000 31 Publication/Issue date: February 2000 40 Publisher/Distributor: Head, Library and Information Services Division, Bhabha Atomic Research Centre, Mumbai 42 Form of distribution: Hard copy 50 Language of text: English 51 Language of summary: English 52 No. of references: 40 refs. 53 Gives data on: Abstract: Nonlinear dynamics manifests itself in a number of phenomena in both laboratory and day to day dealings. -
Robot Dynamics and Control Lecture 8: Basic Lyapunov Stability Theory
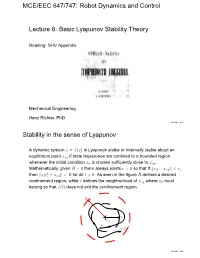
MCE/EEC 647/747: Robot Dynamics and Control Lecture 8: Basic Lyapunov Stability Theory Reading: SHV Appendix Mechanical Engineering Hanz Richter, PhD MCE503 – p.1/17 Stability in the sense of Lyapunov A dynamic system x˙ = f(x) is Lyapunov stable or internally stable about an equilibrium point xeq if state trajectories are confined to a bounded region whenever the initial condition x0 is chosen sufficiently close to xeq. Mathematically, given R> 0 there always exists r > 0 so that if ||x0 − xeq|| <r, then ||x(t) − xeq|| <R for all t> 0. As seen in the figure R defines a desired confinement region, while r defines the neighborhood of xeq where x0 must belong so that x(t) does not exit the confinement region. R r xeq x0 x(t) MCE503 – p.2/17 Stability in the sense of Lyapunov... Note: Lyapunov stability does not require ||x(t)|| to converge to ||xeq||. The stronger definition of asymptotic stability requires that ||x(t)|| → ||xeq|| as t →∞. Input-Output stability (BIBO) does not imply Lyapunov stability. The system can be BIBO stable but have unbounded states that do not cause the output to be unbounded (for example take x1(t) →∞, with y = Cx = [01]x). The definition is difficult to use to test the stability of a given system. Instead, we use Lyapunov’s stability theorem, also called Lyapunov’s direct method. This theorem is only a sufficient condition, however. When the test fails, the results are inconclusive. It’s still the best tool available to evaluate and ensure the stability of nonlinear systems. -

Analysis of ODE Models
Analysis of ODE Models P. Howard Fall 2009 Contents 1 Overview 1 2 Stability 2 2.1 ThePhasePlane ................................. 5 2.2 Linearization ................................... 10 2.3 LinearizationandtheJacobianMatrix . ...... 15 2.4 BriefReviewofLinearAlgebra . ... 20 2.5 Solving Linear First-Order Systems . ...... 23 2.6 StabilityandEigenvalues . ... 28 2.7 LinearStabilitywithMATLAB . .. 35 2.8 Application to Maximum Sustainable Yield . ....... 37 2.9 Nonlinear Stability Theorems . .... 38 2.10 Solving ODE Systems with matrix exponentiation . ......... 40 2.11 Taylor’s Formula for Functions of Multiple Variables . ............ 44 2.12 ProofofPart1ofPoincare–Perron . ..... 45 3 Uniqueness Theory 47 4 Existence Theory 50 1 Overview In these notes we consider the three main aspects of ODE analysis: (1) existence theory, (2) uniqueness theory, and (3) stability theory. In our study of existence theory we ask the most basic question: are the ODE we write down guaranteed to have solutions? Since in practice we solve most ODE numerically, it’s possible that if there is no theoretical solution the numerical values given will have no genuine relation with the physical system we want to analyze. In our study of uniqueness theory we assume a solution exists and ask if it is the only possible solution. If we are solving an ODE numerically we will only get one solution, and if solutions are not unique it may not be the physically interesting solution. While it’s standard in advanced ODE courses to study existence and uniqueness first and stability 1 later, we will start with stability in these note, because it’s the one most directly linked with the modeling process. -

Math Morphing Proximate and Evolutionary Mechanisms
Curriculum Units by Fellows of the Yale-New Haven Teachers Institute 2009 Volume V: Evolutionary Medicine Math Morphing Proximate and Evolutionary Mechanisms Curriculum Unit 09.05.09 by Kenneth William Spinka Introduction Background Essential Questions Lesson Plans Website Student Resources Glossary Of Terms Bibliography Appendix Introduction An important theoretical development was Nikolaas Tinbergen's distinction made originally in ethology between evolutionary and proximate mechanisms; Randolph M. Nesse and George C. Williams summarize its relevance to medicine: All biological traits need two kinds of explanation: proximate and evolutionary. The proximate explanation for a disease describes what is wrong in the bodily mechanism of individuals affected Curriculum Unit 09.05.09 1 of 27 by it. An evolutionary explanation is completely different. Instead of explaining why people are different, it explains why we are all the same in ways that leave us vulnerable to disease. Why do we all have wisdom teeth, an appendix, and cells that if triggered can rampantly multiply out of control? [1] A fractal is generally "a rough or fragmented geometric shape that can be split into parts, each of which is (at least approximately) a reduced-size copy of the whole," a property called self-similarity. The term was coined by Beno?t Mandelbrot in 1975 and was derived from the Latin fractus meaning "broken" or "fractured." A mathematical fractal is based on an equation that undergoes iteration, a form of feedback based on recursion. http://www.kwsi.com/ynhti2009/image01.html A fractal often has the following features: 1. It has a fine structure at arbitrarily small scales. -

Combinatorial and Analytical Problems for Fractals and Their Graph Approximations
UPPSALA DISSERTATIONS IN MATHEMATICS 112 Combinatorial and analytical problems for fractals and their graph approximations Konstantinos Tsougkas Department of Mathematics Uppsala University UPPSALA 2019 Dissertation presented at Uppsala University to be publicly examined in Polhemsalen, Ångströmlaboratoriet, Lägerhyddsvägen 1, Uppsala, Friday, 15 February 2019 at 13:15 for the degree of Doctor of Philosophy. The examination will be conducted in English. Faculty examiner: Professor Ben Hambly (Mathematical Institute, University of Oxford). Abstract Tsougkas, K. 2019. Combinatorial and analytical problems for fractals and their graph approximations. Uppsala Dissertations in Mathematics 112. 37 pp. Uppsala: Department of Mathematics. ISBN 978-91-506-2739-8. The recent field of analysis on fractals has been studied under a probabilistic and analytic point of view. In this present work, we will focus on the analytic part developed by Kigami. The fractals we will be studying are finitely ramified self-similar sets, with emphasis on the post-critically finite ones. A prototype of the theory is the Sierpinski gasket. We can approximate the finitely ramified self-similar sets via a sequence of approximating graphs which allows us to use notions from discrete mathematics such as the combinatorial and probabilistic graph Laplacian on finite graphs. Through that approach or via Dirichlet forms, we can define the Laplace operator on the continuous fractal object itself via either a weak definition or as a renormalized limit of the discrete graph Laplacians on the graphs. The aim of this present work is to study the graphs approximating the fractal and determine connections between the Laplace operator on the discrete graphs and the continuous object, the fractal itself. -

Stability Theory for Ordinary Differential Equations 1. Introduction and Preliminaries
JOURNAL OF THE CHUNGCHEONG MATHEMATICAL SOCIETY Volume 1, June 1988 Stability Theory for Ordinary Differential Equations Sung Kyu Choi, Keon-Hee Lee and Hi Jun Oh ABSTRACT. For a given autonomous system xf = /(a?), we obtain some properties on the location of positive limit sets and investigate some stability concepts which are based upon the existence of Liapunov functions. 1. Introduction and Preliminaries The classical theorem of Liapunov on stability of the origin 鉛 = 0 for a given autonomous system xf = makes use of an auxiliary function V(.x) which has to be positive definite. Also, the time deriva tive V'(⑦) of this function, as computed along the solution, has to be negative definite. It is our aim to investigate some stability concepts of solutions for a given autonomous system which are based upon the existence of suitable Liapunov functions. Let U C Rn be an open subset containing 0 G Rn. Consider the autonomous system x' = /(⑦), where xf is the time derivative of the function :r(t), defined by the continuous function f : U — Rn. When / is C1, to every point t()in R and Xq in 17, there corresponds the unique solution xq) of xf = f(x) such that ^(to) = ⑦⑴ For such a solution, let us denote I(xq) = (aq) the interval where it is defined (a, ⑵ may be infinity). Let f : (a, &) -나 R be a continuous function. Then f is decreasing on (a, b) if and only if the upper right-sided Dini derivative D+f(t) = lim sup f〔t + h(-f(t) < o 九 一>o+ h Received by the editors on March 25, 1988. -

An Overview of Bifurcation Theory
Appendix A An Overview of Bifurcation Theory A.I Introduction In this appendix we want to provide a brief introduction and discussion of the con cepts of dynamical systems and bifurcation theory which has been used in the pre ceding sections . We refer the reader interested in a more thorough discussion of the mathematical results of dynamical systems and bifurcation theory to the books of Wiggins (1990) and Kuznetsov (1995). A discussion intended to more econom ically motivated problems of dynamical systems and chaos can be found in Medio (1992) or Day (1994). It is noteworthy here that chaos is only possible in the non autonomous case; that is, the dynamical system depends explicity on time; but not for the autonomous case where time does not enter directly in the dynamical sys tem (cf. Wiggins (1990». Since both models we have considered in the preceding sections are autonomous they cannot reveal any chaos . However, as the reader has seen, the dynamical systems we have derived reveal some bifurcations. Roughly spoken, bifurcation theory describes the way in which dynamical sys tem changes due to a small perturbation of the system-parameters. A qualitative change in the phase space of the dynamical system occurs at a bifurcation point, that means that the system is structural unstable against a small perturbation in the parameter space and the dynamic structure of the system has changed due to this slight variation in the parameter space. We can distinguish bifurcations into local, global and local/global types, where only the pure types are interesting here. Local bifurcations such as Andronov-Hopfor Fold bifurcations can be detected in a small 182 An Overview of Bifurcation Theory neighborhood ofa single fixed point or stationary point. -

Theoretical-Heuristic Derivation Sommerfeld's Fine Structure
Theoretical-heuristic derivation Sommerfeld’s fine structure constant by Feigenbaum’s constant (delta): perodic logistic maps of double bifurcation Angel Garcés Doz [email protected] Abstract In an article recently published in Vixra: http://vixra.org/abs/1704.0365. Its author (Mario Hieb) conjectured the possible relationship of Feigen- baum’s constant delta with the fine-structure constant of electromag- netism (Sommerfeld’s Fine-Structure Constant). In this article it demon- strated, that indeed, there is an unequivocal physical-mathematical rela- tionship. The logistic map of double bifurcation is a physical image of the random process of the creation-annihilation of virtual pairs lepton- antilepton with electric charge; Using virtual photons. The probability of emission or absorption of a photon by an electron is precisely the fine structure constant for zero momentum, that is to say: Sommerfeld’s Fine- Structure Constant. This probability is coded as the surface of a sphere, or equivalently: four times the surface of a circle. The original, conjectured calculation of Mario Hieb is corrected or improved by the contribution of the entropies of the virtual pairs of leptons with electric charge: muon, tau and electron. Including a correction factor due to the contributions of virtual bosons W and Z; And its decay in electrically charged leptons and quarks. Introduction The main geometric-mathematical characteristics of the logistic map of double universal bifurcation, which determines the two Feigenbaum’s constants; they are: 1) The first Feigenbaum constant is the limiting ratio of each bifurcation interval to the next between every period doubling, of a one-parameter map.