An Introduction to Dynamical Systems and Chaos G.C
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Complexity” Makes a Difference: Lessons from Critical Systems Thinking and the Covid-19 Pandemic in the UK
systems Article How We Understand “Complexity” Makes a Difference: Lessons from Critical Systems Thinking and the Covid-19 Pandemic in the UK Michael C. Jackson Centre for Systems Studies, University of Hull, Hull HU6 7TS, UK; [email protected]; Tel.: +44-7527-196400 Received: 11 November 2020; Accepted: 4 December 2020; Published: 7 December 2020 Abstract: Many authors have sought to summarize what they regard as the key features of “complexity”. Some concentrate on the complexity they see as existing in the world—on “ontological complexity”. Others highlight “cognitive complexity”—the complexity they see arising from the different interpretations of the world held by observers. Others recognize the added difficulties flowing from the interactions between “ontological” and “cognitive” complexity. Using the example of the Covid-19 pandemic in the UK, and the responses to it, the purpose of this paper is to show that the way we understand complexity makes a huge difference to how we respond to crises of this type. Inadequate conceptualizations of complexity lead to poor responses that can make matters worse. Different understandings of complexity are discussed and related to strategies proposed for combatting the pandemic. It is argued that a “critical systems thinking” approach to complexity provides the most appropriate understanding of the phenomenon and, at the same time, suggests which systems methodologies are best employed by decision makers in preparing for, and responding to, such crises. Keywords: complexity; Covid-19; critical systems thinking; systems methodologies 1. Introduction No one doubts that we are, in today’s world, entangled in complexity. At the global level, economic, social, technological, health and ecological factors have become interconnected in unprecedented ways, and the consequences are immense. -

A Gentle Introduction to Dynamical Systems Theory for Researchers in Speech, Language, and Music
A Gentle Introduction to Dynamical Systems Theory for Researchers in Speech, Language, and Music. Talk given at PoRT workshop, Glasgow, July 2012 Fred Cummins, University College Dublin [1] Dynamical Systems Theory (DST) is the lingua franca of Physics (both Newtonian and modern), Biology, Chemistry, and many other sciences and non-sciences, such as Economics. To employ the tools of DST is to take an explanatory stance with respect to observed phenomena. DST is thus not just another tool in the box. Its use is a different way of doing science. DST is increasingly used in non-computational, non-representational, non-cognitivist approaches to understanding behavior (and perhaps brains). (Embodied, embedded, ecological, enactive theories within cognitive science.) [2] DST originates in the science of mechanics, developed by the (co-)inventor of the calculus: Isaac Newton. This revolutionary science gave us the seductive concept of the mechanism. Mechanics seeks to provide a deterministic account of the relation between the motions of massive bodies and the forces that act upon them. A dynamical system comprises • A state description that indexes the components at time t, and • A dynamic, which is a rule governing state change over time The choice of variables defines the state space. The dynamic associates an instantaneous rate of change with each point in the state space. Any specific instance of a dynamical system will trace out a single trajectory in state space. (This is often, misleadingly, called a solution to the underlying equations.) Description of a specific system therefore also requires specification of the initial conditions. In the domain of mechanics, where we seek to account for the motion of massive bodies, we know which variables to choose (position and velocity). -

A Cell Dynamical System Model for Simulation of Continuum Dynamics of Turbulent Fluid Flows A
A Cell Dynamical System Model for Simulation of Continuum Dynamics of Turbulent Fluid Flows A. M. Selvam and S. Fadnavis Email: [email protected] Website: http://www.geocities.com/amselvam Trends in Continuum Physics, TRECOP ’98; Proceedings of the International Symposium on Trends in Continuum Physics, Poznan, Poland, August 17-20, 1998. Edited by Bogdan T. Maruszewski, Wolfgang Muschik, and Andrzej Radowicz. Singapore, World Scientific, 1999, 334(12). 1. INTRODUCTION Atmospheric flows exhibit long-range spatiotemporal correlations manifested as the fractal geometry to the global cloud cover pattern concomitant with inverse power-law form for power spectra of temporal fluctuations of all scales ranging from turbulence (millimeters-seconds) to climate (thousands of kilometers-years) (Tessier et. al., 1996) Long-range spatiotemporal correlations are ubiquitous to dynamical systems in nature and are identified as signatures of self-organized criticality (Bak et. al., 1988) Standard models for turbulent fluid flows in meteorological theory cannot explain satisfactorily the observed multifractal (space-time) structures in atmospheric flows. Numerical models for simulation and prediction of atmospheric flows are subject to deterministic chaos and give unrealistic solutions. Deterministic chaos is a direct consequence of round-off error growth in iterative computations. Round-off error of finite precision computations doubles on an average at each step of iterative computations (Mary Selvam, 1993). Round- off error will propagate to the mainstream computation and give unrealistic solutions in numerical weather prediction (NWP) and climate models which incorporate thousands of iterative computations in long-term numerical integration schemes. A recently developed non-deterministic cell dynamical system model for atmospheric flows (Mary Selvam, 1990; Mary Selvam et. -

Solution Bounds, Stability and Attractors' Estimates of Some Nonlinear Time-Varying Systems
1 Solution Bounds, Stability and Attractors’ Estimates of Some Nonlinear Time-Varying Systems Mark A. Pinsky and Steve Koblik Abstract. Estimation of solution norms and stability for time-dependent nonlinear systems is ubiquitous in numerous applied and control problems. Yet, practically valuable results are rare in this area. This paper develops a novel approach, which bounds the solution norms, derives the corresponding stability criteria, and estimates the trapping/stability regions for a broad class of the corresponding systems. Our inferences rest on deriving a scalar differential inequality for the norms of solutions to the initial systems. Utility of the Lipschitz inequality linearizes the associated auxiliary differential equation and yields both the upper bounds for the norms of solutions and the relevant stability criteria. To refine these inferences, we introduce a nonlinear extension of the Lipschitz inequality, which improves the developed bounds and estimates the stability basins and trapping regions for the corresponding systems. Finally, we conform the theoretical results in representative simulations. Key Words. Comparison principle, Lipschitz condition, stability criteria, trapping/stability regions, solution bounds AMS subject classification. 34A34, 34C11, 34C29, 34C41, 34D08, 34D10, 34D20, 34D45 1. INTRODUCTION. We are going to study a system defined by the equation n (1) xAtxftxFttt , , [0 , ), x , ft ,0 0 where matrix A nn and functions ft:[ , ) nn and F : n are continuous and bounded, and At is also continuously differentiable. It is assumed that the solution, x t, x0 , to the initial value problem, x t0, x 0 x 0 , is uniquely defined for tt0 . Note that the pertained conditions can be found, e.g., in [1] and [2]. -

Strange Attractors and Classical Stability Theory
Nonlinear Dynamics and Systems Theory, 8 (1) (2008) 49–96 Strange Attractors and Classical Stability Theory G. Leonov ∗ St. Petersburg State University Universitetskaya av., 28, Petrodvorets, 198504 St.Petersburg, Russia Received: November 16, 2006; Revised: December 15, 2007 Abstract: Definitions of global attractor, B-attractor and weak attractor are introduced. Relationships between Lyapunov stability, Poincare stability and Zhukovsky stability are considered. Perron effects are discussed. Stability and instability criteria by the first approximation are obtained. Lyapunov direct method in dimension theory is introduced. For the Lorenz system necessary and sufficient conditions of existence of homoclinic trajectories are obtained. Keywords: Attractor, instability, Lyapunov exponent, stability, Poincar´esection, Hausdorff dimension, Lorenz system, homoclinic bifurcation. Mathematics Subject Classification (2000): 34C28, 34D45, 34D20. 1 Introduction In almost any solid survey or book on chaotic dynamics, one encounters notions from classical stability theory such as Lyapunov exponent and characteristic exponent. But the effect of sign inversion in the characteristic exponent during linearization is seldom mentioned. This effect was discovered by Oscar Perron [1], an outstanding German math- ematician. The present survey sets forth Perron’s results and their further development, see [2]–[4]. It is shown that Perron effects may occur on the boundaries of a flow of solutions that is stable by the first approximation. Inside the flow, stability is completely determined by the negativeness of the characteristic exponents of linearized systems. It is often said that the defining property of strange attractors is the sensitivity of their trajectories with respect to the initial data. But how is this property connected with the classical notions of instability? For continuous systems, it was necessary to remember the almost forgotten notion of Zhukovsky instability. -

Chapter 8 Stability Theory
Chapter 8 Stability theory We discuss properties of solutions of a first order two dimensional system, and stability theory for a special class of linear systems. We denote the independent variable by ‘t’ in place of ‘x’, and x,y denote dependent variables. Let I ⊆ R be an interval, and Ω ⊆ R2 be a domain. Let us consider the system dx = F (t, x, y), dt (8.1) dy = G(t, x, y), dt where the functions are defined on I × Ω, and are locally Lipschitz w.r.t. variable (x, y) ∈ Ω. Definition 8.1 (Autonomous system) A system of ODE having the form (8.1) is called an autonomous system if the functions F (t, x, y) and G(t, x, y) are constant w.r.t. variable t. That is, dx = F (x, y), dt (8.2) dy = G(x, y), dt Definition 8.2 A point (x0, y0) ∈ Ω is said to be a critical point of the autonomous system (8.2) if F (x0, y0) = G(x0, y0) = 0. (8.3) A critical point is also called an equilibrium point, a rest point. Definition 8.3 Let (x(t), y(t)) be a solution of a two-dimensional (planar) autonomous system (8.2). The trace of (x(t), y(t)) as t varies is a curve in the plane. This curve is called trajectory. Remark 8.4 (On solutions of autonomous systems) (i) Two different solutions may represent the same trajectory. For, (1) If (x1(t), y1(t)) defined on an interval J is a solution of the autonomous system (8.2), then the pair of functions (x2(t), y2(t)) defined by (x2(t), y2(t)) := (x1(t − s), y1(t − s)), for t ∈ s + J (8.4) is a solution on interval s + J, for every arbitrary but fixed s ∈ R. -

Thermodynamic Properties of Coupled Map Lattices 1 Introduction
Thermodynamic properties of coupled map lattices J´erˆome Losson and Michael C. Mackey Abstract This chapter presents an overview of the literature which deals with appli- cations of models framed as coupled map lattices (CML’s), and some recent results on the spectral properties of the transfer operators induced by various deterministic and stochastic CML’s. These operators (one of which is the well- known Perron-Frobenius operator) govern the temporal evolution of ensemble statistics. As such, they lie at the heart of any thermodynamic description of CML’s, and they provide some interesting insight into the origins of nontrivial collective behavior in these models. 1 Introduction This chapter describes the statistical properties of networks of chaotic, interacting el- ements, whose evolution in time is discrete. Such systems can be profitably modeled by networks of coupled iterative maps, usually referred to as coupled map lattices (CML’s for short). The description of CML’s has been the subject of intense scrutiny in the past decade, and most (though by no means all) investigations have been pri- marily numerical rather than analytical. Investigators have often been concerned with the statistical properties of CML’s, because a deterministic description of the motion of all the individual elements of the lattice is either out of reach or uninteresting, un- less the behavior can somehow be described with a few degrees of freedom. However there is still no consistent framework, analogous to equilibrium statistical mechanics, within which one can describe the probabilistic properties of CML’s possessing a large but finite number of elements. -

Writing the History of Dynamical Systems and Chaos
Historia Mathematica 29 (2002), 273–339 doi:10.1006/hmat.2002.2351 Writing the History of Dynamical Systems and Chaos: View metadata, citation and similar papersLongue at core.ac.uk Dur´ee and Revolution, Disciplines and Cultures1 brought to you by CORE provided by Elsevier - Publisher Connector David Aubin Max-Planck Institut fur¨ Wissenschaftsgeschichte, Berlin, Germany E-mail: [email protected] and Amy Dahan Dalmedico Centre national de la recherche scientifique and Centre Alexandre-Koyre,´ Paris, France E-mail: [email protected] Between the late 1960s and the beginning of the 1980s, the wide recognition that simple dynamical laws could give rise to complex behaviors was sometimes hailed as a true scientific revolution impacting several disciplines, for which a striking label was coined—“chaos.” Mathematicians quickly pointed out that the purported revolution was relying on the abstract theory of dynamical systems founded in the late 19th century by Henri Poincar´e who had already reached a similar conclusion. In this paper, we flesh out the historiographical tensions arising from these confrontations: longue-duree´ history and revolution; abstract mathematics and the use of mathematical techniques in various other domains. After reviewing the historiography of dynamical systems theory from Poincar´e to the 1960s, we highlight the pioneering work of a few individuals (Steve Smale, Edward Lorenz, David Ruelle). We then go on to discuss the nature of the chaos phenomenon, which, we argue, was a conceptual reconfiguration as -

Role of Nonlinear Dynamics and Chaos in Applied Sciences
v.;.;.:.:.:.;.;.^ ROLE OF NONLINEAR DYNAMICS AND CHAOS IN APPLIED SCIENCES by Quissan V. Lawande and Nirupam Maiti Theoretical Physics Oivisipn 2000 Please be aware that all of the Missing Pages in this document were originally blank pages BARC/2OOO/E/OO3 GOVERNMENT OF INDIA ATOMIC ENERGY COMMISSION ROLE OF NONLINEAR DYNAMICS AND CHAOS IN APPLIED SCIENCES by Quissan V. Lawande and Nirupam Maiti Theoretical Physics Division BHABHA ATOMIC RESEARCH CENTRE MUMBAI, INDIA 2000 BARC/2000/E/003 BIBLIOGRAPHIC DESCRIPTION SHEET FOR TECHNICAL REPORT (as per IS : 9400 - 1980) 01 Security classification: Unclassified • 02 Distribution: External 03 Report status: New 04 Series: BARC External • 05 Report type: Technical Report 06 Report No. : BARC/2000/E/003 07 Part No. or Volume No. : 08 Contract No.: 10 Title and subtitle: Role of nonlinear dynamics and chaos in applied sciences 11 Collation: 111 p., figs., ills. 13 Project No. : 20 Personal authors): Quissan V. Lawande; Nirupam Maiti 21 Affiliation ofauthor(s): Theoretical Physics Division, Bhabha Atomic Research Centre, Mumbai 22 Corporate authoifs): Bhabha Atomic Research Centre, Mumbai - 400 085 23 Originating unit : Theoretical Physics Division, BARC, Mumbai 24 Sponsors) Name: Department of Atomic Energy Type: Government Contd...(ii) -l- 30 Date of submission: January 2000 31 Publication/Issue date: February 2000 40 Publisher/Distributor: Head, Library and Information Services Division, Bhabha Atomic Research Centre, Mumbai 42 Form of distribution: Hard copy 50 Language of text: English 51 Language of summary: English 52 No. of references: 40 refs. 53 Gives data on: Abstract: Nonlinear dynamics manifests itself in a number of phenomena in both laboratory and day to day dealings. -

A Simple Scalar Coupled Map Lattice Model for Excitable Media
This is a repository copy of A simple scalar coupled map lattice model for excitable media. White Rose Research Online URL for this paper: http://eprints.whiterose.ac.uk/74667/ Monograph: Guo, Y., Zhao, Y., Coca, D. et al. (1 more author) (2010) A simple scalar coupled map lattice model for excitable media. Research Report. ACSE Research Report no. 1016 . Automatic Control and Systems Engineering, University of Sheffield Reuse Unless indicated otherwise, fulltext items are protected by copyright with all rights reserved. The copyright exception in section 29 of the Copyright, Designs and Patents Act 1988 allows the making of a single copy solely for the purpose of non-commercial research or private study within the limits of fair dealing. The publisher or other rights-holder may allow further reproduction and re-use of this version - refer to the White Rose Research Online record for this item. Where records identify the publisher as the copyright holder, users can verify any specific terms of use on the publisher’s website. Takedown If you consider content in White Rose Research Online to be in breach of UK law, please notify us by emailing [email protected] including the URL of the record and the reason for the withdrawal request. [email protected] https://eprints.whiterose.ac.uk/ A Simple Scalar Coupled Map Lattice Model for Excitable Media Yuzhu Guo, Yifan Zhao, Daniel Coca, and S. A. Billings Research Report No. 1016 Department of Automatic Control and Systems Engineering The University of Sheffield Mappin Street, Sheffield, S1 3JD, UK 8 September 2010 A Simple Scalar Coupled Map Lattice Model for Excitable Media Yuzhu Guo, Yifan Zhao, Daniel Coca, and S.A. -

Annotated List of References Tobias Keip, I7801986 Presentation Method: Poster
Personal Inquiry – Annotated list of references Tobias Keip, i7801986 Presentation Method: Poster Poster Section 1: What is Chaos? In this section I am introducing the topic. I am describing different types of chaos and how individual perception affects our sense for chaos or chaotic systems. I am also going to define the terminology. I support my ideas with a lot of examples, like chaos in our daily life, then I am going to do a transition to simple mathematical chaotic systems. Larry Bradley. (2010). Chaos and Fractals. Available: www.stsci.edu/~lbradley/seminar/. Last accessed 13 May 2010. This website delivered me with a very good introduction into the topic as there are a lot of books and interesting web-pages in the “References”-Sektion. Gleick, James. Chaos: Making a New Science. Penguin Books, 1987. The book gave me a very general introduction into the topic. Harald Lesch. (2003-2007). alpha-Centauri . Available: www.br-online.de/br- alpha/alpha-centauri/alpha-centauri-harald-lesch-videothek-ID1207836664586.xml. Last accessed 13. May 2010. A web-page with German video-documentations delivered a lot of vivid examples about chaos for my poster. Poster Section 2: Laplace's Demon and the Butterfly Effect In this part I describe the idea of the so called Laplace's Demon and the theory of cause-and-effect chains. I work with a lot of examples, especially the famous weather forecast example. Also too I introduce the mathematical concept of a dynamic system. Jeremy S. Heyl (August 11, 2008). The Double Pendulum Fractal. British Columbia, Canada. -
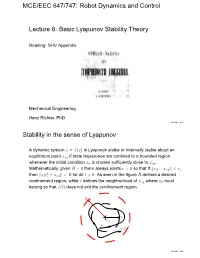
Robot Dynamics and Control Lecture 8: Basic Lyapunov Stability Theory
MCE/EEC 647/747: Robot Dynamics and Control Lecture 8: Basic Lyapunov Stability Theory Reading: SHV Appendix Mechanical Engineering Hanz Richter, PhD MCE503 – p.1/17 Stability in the sense of Lyapunov A dynamic system x˙ = f(x) is Lyapunov stable or internally stable about an equilibrium point xeq if state trajectories are confined to a bounded region whenever the initial condition x0 is chosen sufficiently close to xeq. Mathematically, given R> 0 there always exists r > 0 so that if ||x0 − xeq|| <r, then ||x(t) − xeq|| <R for all t> 0. As seen in the figure R defines a desired confinement region, while r defines the neighborhood of xeq where x0 must belong so that x(t) does not exit the confinement region. R r xeq x0 x(t) MCE503 – p.2/17 Stability in the sense of Lyapunov... Note: Lyapunov stability does not require ||x(t)|| to converge to ||xeq||. The stronger definition of asymptotic stability requires that ||x(t)|| → ||xeq|| as t →∞. Input-Output stability (BIBO) does not imply Lyapunov stability. The system can be BIBO stable but have unbounded states that do not cause the output to be unbounded (for example take x1(t) →∞, with y = Cx = [01]x). The definition is difficult to use to test the stability of a given system. Instead, we use Lyapunov’s stability theorem, also called Lyapunov’s direct method. This theorem is only a sufficient condition, however. When the test fails, the results are inconclusive. It’s still the best tool available to evaluate and ensure the stability of nonlinear systems.