Autonomous Navigation System for High Altitude Balloons
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Potential of Polarization/Raman Lidar to Separate Fine Dust, Coarse Dust
Atmos. Meas. Tech., 10, 3403–3427, 2017 https://doi.org/10.5194/amt-10-3403-2017 © Author(s) 2017. This work is distributed under the Creative Commons Attribution 3.0 License. Potential of polarization/Raman lidar to separate fine dust, coarse dust, maritime, and anthropogenic aerosol profiles Rodanthi-Elisavet Mamouri1,2 and Albert Ansmann3 1Cyprus University of Technology, Dep. of Civil Engineering and Geomatics, Limassol, Cyprus 2The Cyprus Institute, Energy, Environment, and Water Research Center, Nicosia, Cyprus 3Leibniz Institute for Tropospheric Research, Leipzig, Germany Correspondence to: Rodanthi-Elisavet Mamouri ([email protected]) Received: 26 April 2017 – Discussion started: 4 May 2017 Revised: 28 July 2017 – Accepted: 2 August 2017 – Published: 19 September 2017 Abstract. We applied the recently introduced polarization advantages in comparison to 355 and 1064 nm polarization lidar–photometer networking (POLIPHON) technique for lidar approaches and leads to the most robust and accurate the first time to triple-wavelength polarization lidar measure- POLIPHON products. ments at 355, 532, and 1064 nm. The lidar observations were performed at Barbados during the Saharan Aerosol Long- Range Transport and Aerosol-Cloud-Interaction Experiment (SALTRACE) in the summer of 2014. The POLIPHON 1 Introduction method comprises the traditional lidar technique to separate mineral dust and non-dust backscatter contributions and the Polarization lidar is a very powerful remote sensing tool for new, extended approach to separate even the fine and coarse aerosol and cloud research. The technique has been used for dust backscatter fractions. We show that the traditional and a long time to monitor and investigate cirrus cloud systems the advanced method are compatible and lead to a consis- (e.g., Sassen, 1991, 2005; Reichardt et al., 2002, 2008) and tent set of dust and non-dust profiles at simplified, less com- polar stratospheric cloud evolution (see, e.g., Browell et al., plex aerosol layering and mixing conditions as is the case 1990; Achtert and Tesche, 2014). -

GAS DIVISION NEWSLETTER Official Publication of the BFA Gas Division
GAS DIVISION NEWSLETTER Official Publication of the BFA Gas Division Volume 4, Issue 2 Copyright Peter Cuneo & Barbara Fricke, 2003 August 2003 On Saturday morning, we were greeted with a hotel RACE TO KITTY HAWK message saying the morning launch had been cancelled by Ray Bair but a briefing would take place at 7:00 a.m. The entire day was scrubbed due to substantial thunderstorms just west of Dayton in Indiana. As it turned out, the storms dissipated, and the day was pleasant for visiting the As part of the centennial celebration of powered various museums and city historic sites. That evening, flight, RE/MAX sponsored a Balloon Celebration we were treated to a reception at the Air Force Museum which included both hot air and gas flights for the and a briefing that made a Sunday morning launch seem weekend of the Fourth of July. At least that was the possible. Again the threat of severe weather prevented a plan. While about half the field of hot air balloons Saturday night launch. Later that night I found myself finally flew on Sunday morning, the gas flight was clustered in the main briefing room as the hotel staff totally scrubbed. gathered everyone for a tornado “drill”. The intended gas competition was an accuracy flight Sunday morning we were back on the field and once to the monument marking the first flight of the again prepared the equipment for launch. Another Wright brothers in Kitty Hawk, N.C. This is about couple of hours Sunday morning was only slightly better 500 miles from the launch site at Wright Patterson as the local weather allowed launch of some of the hot AFB in Dayton, Ohio. -
We Help Earth Benefit from Space in Summary 2019 Contents
WE HELP EARTH BENEFIT FROM SPACE IN SUMMARY 2019 CONTENTS About this report 2019 HIGHLIGHTS This is an English summary of Swedish 3 Space Corporation’s (SSC) 2019 Annual and Sustainability Report. CEO STATEMENT The Swedish report, available at our web- 4 site, is the legally binding annual report. THIS IS SSC The report summarizes the 2019 fiscal 6 year and covers performance on issues most important to SSC's ability to deliver SSC GLOBAL PRESENCE value to stakeholders in a changing and complex business environment. This 8 summary serves as our United Nations Global Compact (UNGC) Communi- EVOLVING SPACE LANDSCAPE 9 cations on Progress. Visit: STRATEGIC APPROACH https://www.sscspace.com/about-ssc/finances/reports-archive/ 10 Copyright: Unless otherwise indicated, SSC has the copyright to images in this publication. FOCUS AREAS FOR PROFITABLE SUSTAINABLE GROWTH 12 EMPLOYEES - OUR GREATEST ASSET 14 MEET OUR PEOPLE 15 2019 HIGHLIGHTS 2019 HIGHLIGHTS 2019 was another year of exciting space missions and projects for the space sector as a whole, but also for SSC. The rapid development has allowed us to grow and take new steps to prepare for the future. MASER 14 and inauguration of SubOrbital Express as a service Our MASER 14 sounding rocket reached an altitude of approximately 250 kilometers and spent over six minutes in microgravity. The mission inaugurated SubOrbital Express, a service to enable research into microgravity applications, atmospheric physics or other scientific disciplines. In this microgravity environment, we conducted experiments on fluid drainage, X-ray radio graphy and dust formation. Read more: https://www.suborbitalexpress.com Inauguration of exciting antenna art in Inuvik The two SSC antennas at the Inuvik site are painted by the local artists Anick Jenks and Ron English. -

Highlights in Space 2010
International Astronautical Federation Committee on Space Research International Institute of Space Law 94 bis, Avenue de Suffren c/o CNES 94 bis, Avenue de Suffren UNITED NATIONS 75015 Paris, France 2 place Maurice Quentin 75015 Paris, France Tel: +33 1 45 67 42 60 Fax: +33 1 42 73 21 20 Tel. + 33 1 44 76 75 10 E-mail: : [email protected] E-mail: [email protected] Fax. + 33 1 44 76 74 37 URL: www.iislweb.com OFFICE FOR OUTER SPACE AFFAIRS URL: www.iafastro.com E-mail: [email protected] URL : http://cosparhq.cnes.fr Highlights in Space 2010 Prepared in cooperation with the International Astronautical Federation, the Committee on Space Research and the International Institute of Space Law The United Nations Office for Outer Space Affairs is responsible for promoting international cooperation in the peaceful uses of outer space and assisting developing countries in using space science and technology. United Nations Office for Outer Space Affairs P. O. Box 500, 1400 Vienna, Austria Tel: (+43-1) 26060-4950 Fax: (+43-1) 26060-5830 E-mail: [email protected] URL: www.unoosa.org United Nations publication Printed in Austria USD 15 Sales No. E.11.I.3 ISBN 978-92-1-101236-1 ST/SPACE/57 *1180239* V.11-80239—January 2011—775 UNITED NATIONS OFFICE FOR OUTER SPACE AFFAIRS UNITED NATIONS OFFICE AT VIENNA Highlights in Space 2010 Prepared in cooperation with the International Astronautical Federation, the Committee on Space Research and the International Institute of Space Law Progress in space science, technology and applications, international cooperation and space law UNITED NATIONS New York, 2011 UniTEd NationS PUblication Sales no. -
Beyond the Paths of Heaven the Emergence of Space Power Thought
Beyond the Paths of Heaven The Emergence of Space Power Thought A Comprehensive Anthology of Space-Related Master’s Research Produced by the School of Advanced Airpower Studies Edited by Bruce M. DeBlois, Colonel, USAF Professor of Air and Space Technology Air University Press Maxwell Air Force Base, Alabama September 1999 Library of Congress Cataloging-in-Publication Data Beyond the paths of heaven : the emergence of space power thought : a comprehensive anthology of space-related master’s research / edited by Bruce M. DeBlois. p. cm. Includes bibliographical references and index. 1. Astronautics, Military. 2. Astronautics, Military—United States. 3. Space Warfare. 4. Air University (U.S.). Air Command and Staff College. School of Advanced Airpower Studies- -Dissertations. I. Deblois, Bruce M., 1957- UG1520.B48 1999 99-35729 358’ .8—dc21 CIP ISBN 1-58566-067-1 Disclaimer Opinions, conclusions, and recommendations expressed or implied within are solely those of the authors and do not necessarily represent the views of Air University, the United States Air Force, the Department of Defense, or any other US government agency. Cleared for public release: distribution unlimited. ii Contents Chapter Page DISCLAIMER . ii OVERVIEW . ix PART I Space Organization, Doctrine, and Architecture 1 An Aerospace Strategy for an Aerospace Nation . 3 Stephen E. Wright 2 After the Gulf War: Balancing Space Power’s Development . 63 Frank Gallegos 3 Blueprints for the Future: Comparing National Security Space Architectures . 103 Christian C. Daehnick PART II Sanctuary/Survivability Perspectives 4 Safe Heavens: Military Strategy and Space Sanctuary . 185 David W. Ziegler PART III Space Control Perspectives 5 Counterspace Operations for Information Dominance . -

Espinsights the Global Space Activity Monitor
ESPInsights The Global Space Activity Monitor Issue 2 May–June 2019 CONTENTS FOCUS ..................................................................................................................... 1 European industrial leadership at stake ............................................................................ 1 SPACE POLICY AND PROGRAMMES .................................................................................... 2 EUROPE ................................................................................................................. 2 9th EU-ESA Space Council .......................................................................................... 2 Europe’s Martian ambitions take shape ......................................................................... 2 ESA’s advancements on Planetary Defence Systems ........................................................... 2 ESA prepares for rescuing Humans on Moon .................................................................... 3 ESA’s private partnerships ......................................................................................... 3 ESA’s international cooperation with Japan .................................................................... 3 New EU Parliament, new EU European Space Policy? ......................................................... 3 France reflects on its competitiveness and defence posture in space ...................................... 3 Germany joins consortium to support a European reusable rocket......................................... -
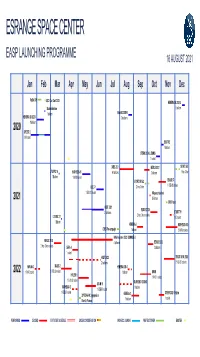
Esrange Launching Programme
ESRANGE SPACE CENTER EASP LAUNCHING PROGRAMME 16 AUGUST 2021 Jan Feb Mar Apr May Jun Jul Aug Sep Oct Nov Dec Rx/Bx TW SSC Cust Conf 2020 HEMERA SB 2020-2 Student balloon 1 balloon 1 balloon Mini-BOOSTER HEMERA SB 2020-1 3 balloons 2020 1 balloons SPIDER 2 1 IM rocket EOSTRE 1 balloon STERN 2020-2 LEONIS 1 rocket CNES 2021 BEXUS 30/31 STORT SF3 LTU IWC 16 MAPHEUS-11 4 balloons 2 balloons 1 Imp. Orion 1 Balloon 1 IM/IM rocket STORT SF1&2 TEXUS 57 BOLT-1 2Imp. Orion 1 VSB-30 rocket 1 S-31/IO rocket NO parachute test 2021 3-6 drops BROR test HADT 2021 REXUS 27/28 2 balloons STORT TF1 2 Imp. Orion rockets LTU IWC 17 1 IO rocket 1 Balloon HEMERA-2 MAPHEUS-9/10 CNES Pre-campaign 1 balloon 2 IM/IM rockets NASA summer 2022 / SUNRISE-3 REXUS 29/30 4 balloons BEXUS 32/33 2 Imp. Orion rockets SERA 4 2 balloons 1 rocket HADT 2022 TEXUS 58/59 (ESA) 2 balloons 2 VSB-30 rockets MIRIAM-2 MAIUS 2 HEMERA LSB-1 2022 1 IM/IO rocket 1 VSB-30 rocket 1 balloon BROR HIFLIER 1 1 IM/IO rocket 1 S-31/IO rocket S1X-M15 DLR ESBO STUDIO MAPHEUS-12 1 VSB-30 rocket 1 balloon 1 VSB-30 rocket STERN 2022-1 HyEnd 25th ESA-PAC symposium HEMERA-3 1 rocket Biarritz, France 1 balloon PERFORMED DECIDED TENTATIVE SCHEDULE UNDER CONSIDERATION NON-ESC LAUNCH PRE-TEST/OTHER EASTER ESRANGE SPACE CENTER EASP LAUNCHING PROGRAMME 16 AUGUST 2021 Jan Feb Mar Apr May Jun Jul Aug Sep Oct Nov Dec Rx/Bx TW 26th ESA-PAC symposium HEMERA2-1 BEXUS 34/35 Switzerland 1 balloon 2 balloons REXUS 31/32 2 Imp. -

Japan's Technical Prowess International Cooperation
Japan Aerospace Exploration Agency April 2016 No. 10 Special Features Japan’s Technical Prowess Technical excellence and team spirit are manifested in such activities as the space station capture of the HTV5 spacecraft, development of the H3 Launch Vehicle, and reduction of sonic boom in supersonic transport International Cooperation JAXA plays a central role in international society and contributes through diverse joint programs, including planetary exploration, and the utilization of Earth observation satellites in the environmental and disaster management fields Japan’s Technical Prowess Contents No. 10 Japan Aerospace Exploration Agency Special Feature 1: Japan’s Technical Prowess 1−3 Welcome to JAXA TODAY Activities of “Team Japan” Connecting the Earth and Space The Japan Aerospace Exploration Agency (JAXA) is positioned as We review some of the activities of “Team the pivotal organization supporting the Japanese government’s Japan,” including the successful capture of H-II Transfer Vehicle 5 (HTV5), which brought overall space development and utilization program with world- together JAXA, NASA and the International Space Station (ISS). leading technology. JAXA undertakes a full spectrum of activities, from basic research through development and utilization. 4–7 In 2013, to coincide with the 10th anniversary of its estab- 2020: The H3 Launch Vehicle Vision JAXA is currently pursuing the development lishment, JAXA defined its management philosophy as “utilizing of the H3 Launch Vehicle, which is expected space and the sky to achieve a safe and affluent society” and to become the backbone of Japan’s space development program and build strong adopted the new corporate slogan “Explore to Realize.” Under- international competitiveness. -

1.Testbed Esrange for Advanced Space Technology Testing
Olle Persson Verksamhetsledare LTU Luleå tekninska universitet satsar på rymdutbildning och forskning 1. “Rymden är ett framtidsområde, där Sverige har möjlighet att ta en europeisk tätposition” 2. 2 nya forsknimsområden inom rymd 3. Nya laboratorier 4. Universitetsövergripande projektledare Rymd: ”Det strategiska arbetet ska stimulera klustring inom och ökad positionering och synliggörande av områdena.” 1. Ståndpunkts-PM. 2. Nationellt samverkansprogram. 3. Expandera rymdforskningen och nya rymdutbildningar. 4. Kommande rymdforskarskola, centrumbildning, RIT, Almedalen Institutet för rymdfysik Syfte IRF är en myndighet under Utbildningsdepartementet och bedriver grundforskning och forskarutbildning i rymdfysik, rymdteknik och atmosfärfysik. IRF gör även tillämpad forskning i signalanalys, sensorteknik och satellitteknik. Mätningar görs med satelliter, ballonger och markbaserade instrument (t ex radar och optiska instrument). www.irf.se Institutet för rymdfysik Framtida projekt • EISCAT 3D • ALIS 4D • BepiColombo (2018) - en ESA/JAXA-mission till Merkurius • Chang’e 4 (2018) – en kinesisk mission till Månen • Solar Orbiter (2019) – en ESA-mission för att studera Solen • MIST (2020) – KTH:s studentsatellit • JUICE (2022) - en ESA-mission till Jupiters isiga månar • SpaceLab • Rymdväder www.irf.se SPACE LAB Detailed technical specifications . Atmospheric chambers . Mechanical testing in a semi-clean environment . Radiation TID . Calibration beam facility . Solar simulator 6 SPACE LAB 7 EISCAT Scientific Association • European Incoherent Geospace Environment SCATter • Associates: China, Finland, Japan, Norway, Sweden, U.K. • Affiliates: France, S. Korea, Ukraine • Founded in 1975, first operations 1981, first Svalbard operations 1996 • "The aim of the Association is to provide access to radar, and other, high- latitude facilities of the highest technical standard for non-military scientific purposes". • Locations: Tromsø (NO), Sodankylä (FI), Kiruna (SE), Longyearbyen Credit: J. -

Paper Takes Flight Teacher Materials
Paper Takes Flight Teacher Materials Contents: LESSON PLAN .............................................................................................................................. 1 Summary: .................................................................................................................................... 1 Objectives:................................................................................................................................... 1 Materials:..................................................................................................................................... 1 Safety Instructions:...................................................................................................................... 1 Background: ................................................................................................................................ 1 Procedure:.................................................................................................................................... 2 Discussion ................................................................................................................................... 2 Assessment/Evaluation:............................................................................................................... 3 Extensions: .................................................................................................................................. 3 Math Integration......................................................................................................................... -

Norway in Space
50 years Norway as a space nation 50 years as a space nation Contents Norway in space 4 Young rocket scientists on Andøya 36 First blast off 6 Leading the world in satellite communications 37 Our unknown multi-talent 10 Vital satellite navigation 42 The European road to space 13 Norway's eye in space 46 The space industry: innovative and traditional 16 At the top of the world 50 Earth watchers 20 To Mars from Svalbard 54 A place in the sun 27 Working in the space industry 58 The Norwegian northern lights pioneers 32 Europe's new time machine 60 Lasers in the night 34 CoveR PHoto: KolBJØRN DAHLE 50 years P H We are entitled to get excited now that we're celebrating oto Norway's 50th anniversary as a space nation We are : TRU entitled to be proud of the fact that the first rocket has been de E as a space nation N followed by more than a thousand others We are entitled G to be pleased with the sound scientific, commercial and societal expertise we have built up in space technology over the course of these 50 years Things have turned out very differently from what we envisaged when Ferdinand was launched in the 1960s We were very optimistic about space travel then, and many people believed that it was only a question of a few decades before we made it to Mars We envisaged a permanent set- tlement on the moon and that hotel breaks orbiting the Earth would soon become a holiday option There has been incredible development, but in a com- pletely different direction than into space What has actu- ally happened is that space technology has become -

Atmospheric Planetary Probes And
SPECIAL ISSUE PAPER 1 Atmospheric planetary probes and balloons in the solar system A Coustenis1∗, D Atkinson2, T Balint3, P Beauchamp3, S Atreya4, J-P Lebreton5, J Lunine6, D Matson3,CErd5,KReh3, T R Spilker3, J Elliott3, J Hall3, and N Strange3 1LESIA, Observatoire de Paris-Meudon, Meudon Cedex, France 2Department Electrical & Computer Engineering, University of Idaho, Moscow, ID, USA 3Jet Propulsion Laboratory, California Institute of Technology, Pasadena, CA, USA 4University of Michigan, Ann Arbor, MI, USA 5ESA/ESTEC, AG Noordwijk, The Netherlands 6Dipartment di Fisica, University degli Studi di Roma, Rome, Italy The manuscript was received on 28 January 2010 and was accepted after revision for publication on 5 November 2010. DOI: 10.1177/09544100JAERO802 Abstract: A primary motivation for in situ probe and balloon missions in the solar system is to progressively constrain models of its origin and evolution. Specifically, understanding the origin and evolution of multiple planetary atmospheres within our solar system would provide a basis for comparative studies that lead to a better understanding of the origin and evolution of our Q1 own solar system as well as extra-solar planetary systems. Hereafter, the authors discuss in situ exploration science drivers, mission architectures, and technologies associated with probes at Venus, the giant planets and Titan. Q2 Keywords: 1 INTRODUCTION provide significant design challenge, thus translating to high mission complexity, risk, and cost. Since the beginning of the space age in 1957, the This article focuses on the exploration of planetary United States, European countries, and the Soviet bodies with sizable atmospheres, using entry probes Union have sent dozens of spacecraft, including and aerial mobility systems, namely balloons.