Archeops In-Flight Performance, Data Processing, and Map Making
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Potential of Polarization/Raman Lidar to Separate Fine Dust, Coarse Dust
Atmos. Meas. Tech., 10, 3403–3427, 2017 https://doi.org/10.5194/amt-10-3403-2017 © Author(s) 2017. This work is distributed under the Creative Commons Attribution 3.0 License. Potential of polarization/Raman lidar to separate fine dust, coarse dust, maritime, and anthropogenic aerosol profiles Rodanthi-Elisavet Mamouri1,2 and Albert Ansmann3 1Cyprus University of Technology, Dep. of Civil Engineering and Geomatics, Limassol, Cyprus 2The Cyprus Institute, Energy, Environment, and Water Research Center, Nicosia, Cyprus 3Leibniz Institute for Tropospheric Research, Leipzig, Germany Correspondence to: Rodanthi-Elisavet Mamouri ([email protected]) Received: 26 April 2017 – Discussion started: 4 May 2017 Revised: 28 July 2017 – Accepted: 2 August 2017 – Published: 19 September 2017 Abstract. We applied the recently introduced polarization advantages in comparison to 355 and 1064 nm polarization lidar–photometer networking (POLIPHON) technique for lidar approaches and leads to the most robust and accurate the first time to triple-wavelength polarization lidar measure- POLIPHON products. ments at 355, 532, and 1064 nm. The lidar observations were performed at Barbados during the Saharan Aerosol Long- Range Transport and Aerosol-Cloud-Interaction Experiment (SALTRACE) in the summer of 2014. The POLIPHON 1 Introduction method comprises the traditional lidar technique to separate mineral dust and non-dust backscatter contributions and the Polarization lidar is a very powerful remote sensing tool for new, extended approach to separate even the fine and coarse aerosol and cloud research. The technique has been used for dust backscatter fractions. We show that the traditional and a long time to monitor and investigate cirrus cloud systems the advanced method are compatible and lead to a consis- (e.g., Sassen, 1991, 2005; Reichardt et al., 2002, 2008) and tent set of dust and non-dust profiles at simplified, less com- polar stratospheric cloud evolution (see, e.g., Browell et al., plex aerosol layering and mixing conditions as is the case 1990; Achtert and Tesche, 2014). -

The Q/U Imaging Experiment (QUIET): the Q-Band Receiver Array Instrument and Observations by Laura Newburgh Advisor: Professor Amber Miller
The Q/U Imaging ExperimenT (QUIET): The Q-band Receiver Array Instrument and Observations by Laura Newburgh Advisor: Professor Amber Miller Submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy in the Graduate School of Arts and Sciences COLUMBIA UNIVERSITY 2010 c 2010 Laura Newburgh All Rights Reserved Abstract The Q/U Imaging ExperimenT (QUIET): The Q-band Receiver Array Instrument and Observations by Laura Newburgh Phase I of the Q/U Imaging ExperimenT (QUIET) measures the Cosmic Microwave Background polarization anisotropy spectrum at angular scales 25 1000. QUIET has deployed two independent receiver arrays. The 40-GHz array took data between October 2008 and June 2009 in the Atacama Desert in northern Chile. The 90-GHz array was deployed in June 2009 and observations are ongoing. Both receivers observe four 15◦ 15◦ regions of the sky in the southern hemisphere that are expected × to have low or negligible levels of polarized foreground contamination. This thesis will describe the 40 GHz (Q-band) QUIET Phase I instrument, instrument testing, observations, analysis procedures, and preliminary power spectra. Contents 1 Cosmology with the Cosmic Microwave Background 1 1.1 The Cosmic Microwave Background . 1 1.2 Inflation . 2 1.2.1 Single Field Slow Roll Inflation . 3 1.2.2 Observables . 4 1.3 CMB Anisotropies . 6 1.3.1 Temperature . 6 1.3.2 Polarization . 7 1.3.3 Angular Power Spectrum Decomposition . 8 1.4 Foregrounds . 14 1.5 CMB Science with QUIET . 15 2 The Q/U Imaging ExperimenT Q-band Instrument 19 2.1 QUIET Q-band Instrument Overview . -
We Help Earth Benefit from Space in Summary 2019 Contents
WE HELP EARTH BENEFIT FROM SPACE IN SUMMARY 2019 CONTENTS About this report 2019 HIGHLIGHTS This is an English summary of Swedish 3 Space Corporation’s (SSC) 2019 Annual and Sustainability Report. CEO STATEMENT The Swedish report, available at our web- 4 site, is the legally binding annual report. THIS IS SSC The report summarizes the 2019 fiscal 6 year and covers performance on issues most important to SSC's ability to deliver SSC GLOBAL PRESENCE value to stakeholders in a changing and complex business environment. This 8 summary serves as our United Nations Global Compact (UNGC) Communi- EVOLVING SPACE LANDSCAPE 9 cations on Progress. Visit: STRATEGIC APPROACH https://www.sscspace.com/about-ssc/finances/reports-archive/ 10 Copyright: Unless otherwise indicated, SSC has the copyright to images in this publication. FOCUS AREAS FOR PROFITABLE SUSTAINABLE GROWTH 12 EMPLOYEES - OUR GREATEST ASSET 14 MEET OUR PEOPLE 15 2019 HIGHLIGHTS 2019 HIGHLIGHTS 2019 was another year of exciting space missions and projects for the space sector as a whole, but also for SSC. The rapid development has allowed us to grow and take new steps to prepare for the future. MASER 14 and inauguration of SubOrbital Express as a service Our MASER 14 sounding rocket reached an altitude of approximately 250 kilometers and spent over six minutes in microgravity. The mission inaugurated SubOrbital Express, a service to enable research into microgravity applications, atmospheric physics or other scientific disciplines. In this microgravity environment, we conducted experiments on fluid drainage, X-ray radio graphy and dust formation. Read more: https://www.suborbitalexpress.com Inauguration of exciting antenna art in Inuvik The two SSC antennas at the Inuvik site are painted by the local artists Anick Jenks and Ron English. -

Highlights in Space 2010
International Astronautical Federation Committee on Space Research International Institute of Space Law 94 bis, Avenue de Suffren c/o CNES 94 bis, Avenue de Suffren UNITED NATIONS 75015 Paris, France 2 place Maurice Quentin 75015 Paris, France Tel: +33 1 45 67 42 60 Fax: +33 1 42 73 21 20 Tel. + 33 1 44 76 75 10 E-mail: : [email protected] E-mail: [email protected] Fax. + 33 1 44 76 74 37 URL: www.iislweb.com OFFICE FOR OUTER SPACE AFFAIRS URL: www.iafastro.com E-mail: [email protected] URL : http://cosparhq.cnes.fr Highlights in Space 2010 Prepared in cooperation with the International Astronautical Federation, the Committee on Space Research and the International Institute of Space Law The United Nations Office for Outer Space Affairs is responsible for promoting international cooperation in the peaceful uses of outer space and assisting developing countries in using space science and technology. United Nations Office for Outer Space Affairs P. O. Box 500, 1400 Vienna, Austria Tel: (+43-1) 26060-4950 Fax: (+43-1) 26060-5830 E-mail: [email protected] URL: www.unoosa.org United Nations publication Printed in Austria USD 15 Sales No. E.11.I.3 ISBN 978-92-1-101236-1 ST/SPACE/57 *1180239* V.11-80239—January 2011—775 UNITED NATIONS OFFICE FOR OUTER SPACE AFFAIRS UNITED NATIONS OFFICE AT VIENNA Highlights in Space 2010 Prepared in cooperation with the International Astronautical Federation, the Committee on Space Research and the International Institute of Space Law Progress in space science, technology and applications, international cooperation and space law UNITED NATIONS New York, 2011 UniTEd NationS PUblication Sales no. -
Beyond the Paths of Heaven the Emergence of Space Power Thought
Beyond the Paths of Heaven The Emergence of Space Power Thought A Comprehensive Anthology of Space-Related Master’s Research Produced by the School of Advanced Airpower Studies Edited by Bruce M. DeBlois, Colonel, USAF Professor of Air and Space Technology Air University Press Maxwell Air Force Base, Alabama September 1999 Library of Congress Cataloging-in-Publication Data Beyond the paths of heaven : the emergence of space power thought : a comprehensive anthology of space-related master’s research / edited by Bruce M. DeBlois. p. cm. Includes bibliographical references and index. 1. Astronautics, Military. 2. Astronautics, Military—United States. 3. Space Warfare. 4. Air University (U.S.). Air Command and Staff College. School of Advanced Airpower Studies- -Dissertations. I. Deblois, Bruce M., 1957- UG1520.B48 1999 99-35729 358’ .8—dc21 CIP ISBN 1-58566-067-1 Disclaimer Opinions, conclusions, and recommendations expressed or implied within are solely those of the authors and do not necessarily represent the views of Air University, the United States Air Force, the Department of Defense, or any other US government agency. Cleared for public release: distribution unlimited. ii Contents Chapter Page DISCLAIMER . ii OVERVIEW . ix PART I Space Organization, Doctrine, and Architecture 1 An Aerospace Strategy for an Aerospace Nation . 3 Stephen E. Wright 2 After the Gulf War: Balancing Space Power’s Development . 63 Frank Gallegos 3 Blueprints for the Future: Comparing National Security Space Architectures . 103 Christian C. Daehnick PART II Sanctuary/Survivability Perspectives 4 Safe Heavens: Military Strategy and Space Sanctuary . 185 David W. Ziegler PART III Space Control Perspectives 5 Counterspace Operations for Information Dominance . -

Maturity of Lumped Element Kinetic Inductance Detectors For
Astronomy & Astrophysics manuscript no. Catalano˙f c ESO 2018 September 26, 2018 Maturity of lumped element kinetic inductance detectors for space-borne instruments in the range between 80 and 180 GHz A. Catalano1,2, A. Benoit2, O. Bourrion1, M. Calvo2, G. Coiffard3, A. D’Addabbo4,2, J. Goupy2, H. Le Sueur5, J. Mac´ıas-P´erez1, and A. Monfardini2,1 1 LPSC, Universit Grenoble-Alpes, CNRS/IN2P3, 2 Institut N´eel, CNRS, Universit´eJoseph Fourier Grenoble I, 25 rue des Martyrs, Grenoble, 3 Institut de Radio Astronomie Millim´etrique (IRAM), Grenoble, 4 LNGS - Laboratori Nazionali del Gran Sasso - Assergi (AQ), 5 Centre de Sciences Nucl´eaires et de Sciences de la Mati`ere (CSNSM), CNRS/IN2P3, bat 104 - 108, 91405 Orsay Campus Preprint online version: September 26, 2018 ABSTRACT This work intends to give the state-of-the-art of our knowledge of the performance of lumped element kinetic inductance detectors (LEKIDs) at millimetre wavelengths (from 80 to 180 GHz). We evaluate their optical sensitivity under typical background conditions that are representative of a space environment and their interaction with ionising particles. Two LEKID arrays, originally designed for ground-based applications and composed of a few hundred pixels each, operate at a central frequency of 100 and 150 GHz (∆ν/ν about 0.3). Their sensitivities were characterised in the laboratory using a dedicated closed-cycle 100 mK dilution cryostat and a sky simulator, allowing for the reproduction of realistic, space-like observation conditions. The impact of cosmic rays was evaluated by exposing the LEKID arrays to alpha particles (241Am) and X sources (109Cd), with a read-out sampling frequency similar to those used for Planck HFI (about 200 Hz), and also with a high resolution sampling level (up to 2 MHz) to better characterise and interpret the observed glitches. -

CMB Telescopes and Optical Systems to Appear In: Planets, Stars and Stellar Systems (PSSS) Volume 1: Telescopes and Instrumentation
CMB Telescopes and Optical Systems To appear in: Planets, Stars and Stellar Systems (PSSS) Volume 1: Telescopes and Instrumentation Shaul Hanany ([email protected]) University of Minnesota, School of Physics and Astronomy, Minneapolis, MN, USA, Michael Niemack ([email protected]) National Institute of Standards and Technology and University of Colorado, Boulder, CO, USA, and Lyman Page ([email protected]) Princeton University, Department of Physics, Princeton NJ, USA. March 26, 2012 Abstract The cosmic microwave background radiation (CMB) is now firmly established as a funda- mental and essential probe of the geometry, constituents, and birth of the Universe. The CMB is a potent observable because it can be measured with precision and accuracy. Just as importantly, theoretical models of the Universe can predict the characteristics of the CMB to high accuracy, and those predictions can be directly compared to observations. There are multiple aspects associated with making a precise measurement. In this review, we focus on optical components for the instrumentation used to measure the CMB polarization and temperature anisotropy. We begin with an overview of general considerations for CMB ob- servations and discuss common concepts used in the community. We next consider a variety of alternatives available for a designer of a CMB telescope. Our discussion is guided by arXiv:1206.2402v1 [astro-ph.IM] 11 Jun 2012 the ground and balloon-based instruments that have been implemented over the years. In the same vein, we compare the arc-minute resolution Atacama Cosmology Telescope (ACT) and the South Pole Telescope (SPT). CMB interferometers are presented briefly. We con- clude with a comparison of the four CMB satellites, Relikt, COBE, WMAP, and Planck, to demonstrate a remarkable evolution in design, sensitivity, resolution, and complexity over the past thirty years. -

Espinsights the Global Space Activity Monitor
ESPInsights The Global Space Activity Monitor Issue 2 May–June 2019 CONTENTS FOCUS ..................................................................................................................... 1 European industrial leadership at stake ............................................................................ 1 SPACE POLICY AND PROGRAMMES .................................................................................... 2 EUROPE ................................................................................................................. 2 9th EU-ESA Space Council .......................................................................................... 2 Europe’s Martian ambitions take shape ......................................................................... 2 ESA’s advancements on Planetary Defence Systems ........................................................... 2 ESA prepares for rescuing Humans on Moon .................................................................... 3 ESA’s private partnerships ......................................................................................... 3 ESA’s international cooperation with Japan .................................................................... 3 New EU Parliament, new EU European Space Policy? ......................................................... 3 France reflects on its competitiveness and defence posture in space ...................................... 3 Germany joins consortium to support a European reusable rocket......................................... -
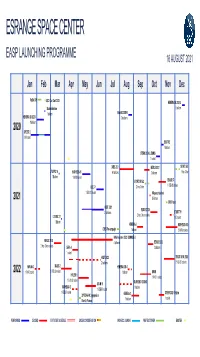
Esrange Launching Programme
ESRANGE SPACE CENTER EASP LAUNCHING PROGRAMME 16 AUGUST 2021 Jan Feb Mar Apr May Jun Jul Aug Sep Oct Nov Dec Rx/Bx TW SSC Cust Conf 2020 HEMERA SB 2020-2 Student balloon 1 balloon 1 balloon Mini-BOOSTER HEMERA SB 2020-1 3 balloons 2020 1 balloons SPIDER 2 1 IM rocket EOSTRE 1 balloon STERN 2020-2 LEONIS 1 rocket CNES 2021 BEXUS 30/31 STORT SF3 LTU IWC 16 MAPHEUS-11 4 balloons 2 balloons 1 Imp. Orion 1 Balloon 1 IM/IM rocket STORT SF1&2 TEXUS 57 BOLT-1 2Imp. Orion 1 VSB-30 rocket 1 S-31/IO rocket NO parachute test 2021 3-6 drops BROR test HADT 2021 REXUS 27/28 2 balloons STORT TF1 2 Imp. Orion rockets LTU IWC 17 1 IO rocket 1 Balloon HEMERA-2 MAPHEUS-9/10 CNES Pre-campaign 1 balloon 2 IM/IM rockets NASA summer 2022 / SUNRISE-3 REXUS 29/30 4 balloons BEXUS 32/33 2 Imp. Orion rockets SERA 4 2 balloons 1 rocket HADT 2022 TEXUS 58/59 (ESA) 2 balloons 2 VSB-30 rockets MIRIAM-2 MAIUS 2 HEMERA LSB-1 2022 1 IM/IO rocket 1 VSB-30 rocket 1 balloon BROR HIFLIER 1 1 IM/IO rocket 1 S-31/IO rocket S1X-M15 DLR ESBO STUDIO MAPHEUS-12 1 VSB-30 rocket 1 balloon 1 VSB-30 rocket STERN 2022-1 HyEnd 25th ESA-PAC symposium HEMERA-3 1 rocket Biarritz, France 1 balloon PERFORMED DECIDED TENTATIVE SCHEDULE UNDER CONSIDERATION NON-ESC LAUNCH PRE-TEST/OTHER EASTER ESRANGE SPACE CENTER EASP LAUNCHING PROGRAMME 16 AUGUST 2021 Jan Feb Mar Apr May Jun Jul Aug Sep Oct Nov Dec Rx/Bx TW 26th ESA-PAC symposium HEMERA2-1 BEXUS 34/35 Switzerland 1 balloon 2 balloons REXUS 31/32 2 Imp. -

The Cosmic Microwave Background Anisotropy Power Spectrum Measured by Archeops
Article published by EDP Sciences and available at http://www.aanda.org or http://dx.doi.org/10.1051/0004-6361:20021850 L22 A. Benoˆıt et al.: The cosmic microwave background anisotropy power spectrum measured by Archeops We construct maps by bandpassing the data between 0.3 Table 1. The Archeops CMB power spectrum for the best two pho- and 45 Hz, corresponding to about 30 deg and 15 arcmin scales, tometers (third column). Data points given in this table correspond to respectively. The high–pass filter removes remaining atmo- the red points in Fig. 2. The fourth column shows the power spec- spheric and galactic contamination, the low–pass filter sup- trum for the self difference (SD) of the two photometers as described presses non–stationary high frequency noise. The filtering is in Sect. 4. The fifth column shows the power spectrum for the differ- done in such a way that ringing effects of the signal on ence (D) between the two photometers. bright compact sources (mainly the Galactic plane) are smaller `(`+1)C` 2 2 2 `min `max (µK) SD (µK) D (µK) than 36 µK2 on the CMB power spectrum in the very first (2π) `–bin,∼ and negligible for larger multipoles. Filtered TOI of each 15 22 789 537 21 34 14 34 ± − ± − ± absolutely calibrated detector are co–added on the sky to form 22 35 936 230 6 25 34 21 35 45 1198 ± 262 −69 ± 45 75 ± 35 detector maps. The bias of the CMB power spectrum due to ± − ± − ± filtering is accounted for in the MASTER process through the 45 60 912 224 18 50 9 37 60 80 1596 ± 224 −33 ± 63 8 ± 44 transfer function. -

Japan's Technical Prowess International Cooperation
Japan Aerospace Exploration Agency April 2016 No. 10 Special Features Japan’s Technical Prowess Technical excellence and team spirit are manifested in such activities as the space station capture of the HTV5 spacecraft, development of the H3 Launch Vehicle, and reduction of sonic boom in supersonic transport International Cooperation JAXA plays a central role in international society and contributes through diverse joint programs, including planetary exploration, and the utilization of Earth observation satellites in the environmental and disaster management fields Japan’s Technical Prowess Contents No. 10 Japan Aerospace Exploration Agency Special Feature 1: Japan’s Technical Prowess 1−3 Welcome to JAXA TODAY Activities of “Team Japan” Connecting the Earth and Space The Japan Aerospace Exploration Agency (JAXA) is positioned as We review some of the activities of “Team the pivotal organization supporting the Japanese government’s Japan,” including the successful capture of H-II Transfer Vehicle 5 (HTV5), which brought overall space development and utilization program with world- together JAXA, NASA and the International Space Station (ISS). leading technology. JAXA undertakes a full spectrum of activities, from basic research through development and utilization. 4–7 In 2013, to coincide with the 10th anniversary of its estab- 2020: The H3 Launch Vehicle Vision JAXA is currently pursuing the development lishment, JAXA defined its management philosophy as “utilizing of the H3 Launch Vehicle, which is expected space and the sky to achieve a safe and affluent society” and to become the backbone of Japan’s space development program and build strong adopted the new corporate slogan “Explore to Realize.” Under- international competitiveness. -
PLANCK (Retour D’Expérience Pour Le CS IN2P3)
PLANCK (retour d’expérience pour le CS IN2P3) July 2020 1. Résumé (une page) Planck was an ESA mission to observe the first light in the Universe. Planck was selected in 1995 as the third Medium-Sized Mission (M3) of ESA's Horizon 2000 Scientific Programme, and later became part of its Cosmic Vision Programme. It was designed to image the temperature and polarization anisotropies of the Cosmic Background Radiation Field over the whole sky, with an unprecedented combination of sensitivity and angular resolution. Planck was testing theories of the early universe and the origin of cosmic structure and providing a major source of information relevant to many cosmological and astrophysical issues. Planck was formerly called COBRAS/SAMBA. After the mission was selected and approved (in late 1996), it was renamed in honor of the German scientist Max Planck (1858-1947), Nobel Prize for Physics in 1918. Planck was launched on 14 May 2009, and the minimum requirement for success was for the spacecraft to complete two whole surveys of the sky. In the end, Planck worked perfectly for 30 months, about twice the span originally required, and completed five full-sky surveys with both instruments. Able to work at higher temperatures than the High Frequency Instrument (HFI), the Low Frequency Instrument (LFI) continued to survey the sky for a large part of 2013, providing even more data to improve the Planck final results. Planck was turned off on 23 October 2013. The high-quality data the mission has produced was released in three major sets of papers: ● 2013 data release (PR1) On 21 March 2013, the European-led research team behind the Planck cosmology probe released the mission's all-sky map of the cosmic microwave background together with a set of 32 scientific papers.