Microsemi® Smartfusion®: Cortex -M3 Lab
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Actel Smartfusion and Keil
Microsemi® SmartFusion®2 Lab: M2S090TS-EVAL-KIT with ARM® Keil™ MDK toolkit featuring Serial Wire Viewer and ETM Instruction Trace Spring 2017 Version 1.1 by Robert Boys [email protected] The latest version of this document is here: www.keil.com/appnotes/docs/apnt_292.asp Introduction: This note describes the process of operating the ARM® Keil™ MDK toolkit featuring μVision® and Microsemi’s (Actel™) SmartFusion2 (SF2) family which contains an embedded ARM® Cortex™-M3 processor. SmartFusion2 implements ARM Serial Wire Viewer (SWV) and Embedded Trace Macrocell (ETM) CoreSight debug technology. This note describes how to get all the components of this important technology working with µVision. This article uses MDK® 5.23 or later and a Microsemi M2S090TS-EVAL-KIT. You can adapt this document to your own target board. Keil supports 8051, ARM7, Cortex-M1 and Cortex-M3 processors as used in various Microsemi (Actel) products. For more information see www.keil.com/Microsemi Keil MDK-Lite™ is a free evaluation version that limits code size to 32 Kbytes. Nearly all Keil examples will compile within this 32K limit. The addition of a valid license number will turn it into an unrestricted commercial version. CMSIS is an ARM standard. CMSIS 5 has an Apache 2.0 license. GitHub: https://github.com/ARM-software/CMSIS_5 Why Use Keil MDK ? MDK provides these features suited for Microsemi products: 1. µVision IDE with Debugger, Flash programmer and the ARM® Compiler. MDK is turn-key "out-of-the-box". 2. ARM Compiler 5 and ARM Compiler 6 (LLVM) included. GCC is supported. -

Designing with Smartfusion Intelligent Mixed Signal Fpgas Webinar
™ Designing with SmartFusion Wendy Lockhart Sr. Manager, Design Solutions Agenda SmartFusion Overview SmartFusion Design Flows Embedded design FPGA design Analog design MSS Configurator and Embedded Example Ecosystem SmartFusion Design Hardware Actel Corporation © 2010 2 What is SmartFusion? Actel Corporation © 2010 3 SmartFusion: Innovative, Intelligent, Integration Proven FPGA fabric Complete ARM® Cortex™-M3 MCU subsystem...& it’s ‘hard’ Programmable analog In a flash-based device In production now! Actel Corporation © 2010 4 Why SmartFusion is a Smart Decision No-compromise integration Complete ARM Cortex-M3 subsystem running at 100 MHz Proven flash-based FPGA fabric Programmable high-voltage analog Full customization Design the exact system you need Hardware and software co-design IP protection FlashLock® technology with AES encryption Ease-of-use Optimized for hardware and software co-design Actel Corporation © 2010 5 No-Compromise FPGA Fabric Proven flash-based FPGA fabric 60,000 to 500,000 system gates 350 MHz system performance Embedded SRAMs and FIFOs Up to 128 FPGA I/Os Actel Corporation © 2010 6 No-Compromise Microcontroller Subsystem (MSS) 100 MHz 32-bit ARM Cortex-M3 processor Bus matrix with up to 16 Gbps throughput 10/100 Ethernet MAC SPI, I2C, UART, 32-bit Timers Up to 512 KB flash and 64 KB of SRAM External memory controller 8-channel DMA controller 32 GPIOs; Extendable via the FPGA Fabric Up to 41 MSS I/Os Actel Corporation © 2010 7 Programmable Analog Analog compute engine (ACE) -

EDN China2010 Innovation Award Results Announced
EDN China2010 Innovation Award Results Announced (Beijing, November 17, 2010) EDN China, the premier media and community site for China’s electronics design industry, has announced the results of the 2010 EDN China Innovation Award. Twenty-two products from 20 technology suppliers received "Best Product Award", 40 products landed with "Leading Product Award" and 10 products "Editor's Choice Award", and the honorary title of "Engineers’ Favorite Distributor" went to eight technical service distributors. A total of 81 companies and 154 products competing for the "Best Product Award" under nine technical categories participated in the program this year and the final result is based on the voting by ednchina.com’s registered users, the award panel judges and EDN China editors, William Zhang, publisher of EDN China, noted, "This year we have tried to innovate our Innovation Award and related events, in a bid to recognize more innovative methods and products in the industry." This year for the "Best Product Award", 21 sub-category awards were added under the nine technical categories to highlight the achievements of related suppliers in their technical sectors of strength.. The nine categories are testing and measurement, power devices and modules, development tools and software, Programmable Logic, analog/mixed signals, embedded system, communication and networking, microprocessor and DSP, passive component and sensor. Based on the criteria of "international-level products developed with local resources", 10 innovative products won the "Editor's Choice Award" this year. They come from Spreadtrum, Rigol, Agate Logic, SBS, ZLG, MIPS, Sensirion, EPC, Mornsun and Chipsea Technologies, with their outstanding achievements in semiconductor design and manufacturing mostly done in China. -

Field Programmable Gate Array Implementation Technology
International Journal of Engineering and Advanced Technology (IJEAT ) ISSN: 2249 – 8958, Volume-2, Issue-1, October 2012 Field Programmable Gate Array Implementation Technology Syed.Awais Hyder, D.Sri Kanth, C.Chandrasekhar, E.Sammaiah “personality” when you recompile a different configuration Abstract— A field-programmable gate array (FPGA) is an of circuitry. In the past, FPGA technology could be used only integrated circuit designed to be configured by a customer or a by engineers with a deep understanding of digital hardware designer after manufacturing hence "field-programmable". The design. The rise of high-level design tools, however, is FPGA configuration is generally specified using hardware changing the rules of FPGA programming, with new (HDL), similar to that used for an application-specific integrated technologies that convert graphical block diagrams or even C circuit (ASIC) (circuit diagrams were previously used to specify code into digital hardware circuitry. FPGA chip adoption the configuration, as they were for ASICs, but this is across all industries is driven by the fact that FPGAs combine increasingly rare). FPGAs can be used to implement any logical function that an ASIC could perform. The ability to update the the best parts of ASICs and processor-based systems. FPGAs functionality after shipping, partial re-configuration of a portion provide hardware-timed speed and reliability, but they do not of the design and the low non-recurring engineering costs require high volumes to justify the large upfront expense of relative to an ASIC design (notwithstanding the generally higher custom ASIC design. Reprogrammable silicon also has the unit cost), offer advantages for many applications. -
PEEDI Reva User's Manual
PEEDI Powerful Embedded Ethernet Debug Interface User Manual Version 1.44 DEVELOPMENTTOOLS Acknowledgement Acknowledgement March, 2013 Ronetix has made every attempt to ensure that the information in this document is accurate and complete. However, Ronetix assumes no responsibility for any errors, omissions, or for any consequences resulting from the use of the information included herein or the equipment it accompanies. Ronetix reserves the right to make changes in its products and specifications at any time without notice. Any software described in this document is furnished under a license or non-disclosure agreement. It is against the law to copy this software on magnetic tape, disk, or other medium for any purpose other than the licensee’s personal use. Ronetix Development Tools GmbH Waidhausenstrasse 13/5 1140 Vienna Austria Tel: +43-720-500315 +43-1-956-3138 Fax: +43-1-8174-955-3464 Web: www.ronetix.at E-Mail: [email protected] Acknowledgments: ARM, ARM7, ARM9, ARM11, Cortex-M3, Cortex-A8 and Thumb are trademarks of ARM Ltd. PowerPC and ColdFire are trademarks of Freescale Ltd. Blackfin is trademark of Analog Devices Ltd. Windows, Win32, Windows CE are trademarks of Microsoft Corporation. Ethernet is a trademark of XEROX. MIPS32 is a trademark of MIPS Technologies. AVR32 is a trademark of Atmel. All other trademarks are trademarks of their respective companies. Copyright© 2005-2013 Ronetix Development Tools GmbH All rights reserved. PEEDI User’s Manual 1 www.ronetix.at Change log Change log August 2013 - Added CYCLONE_VA/_SMP/B core -

Dataman Price List
215 E. Michigan Ave. Orange City, FL 32763 Tel: (386) 774-7785 / Fax: (386) 774-7796 Price List February 2021 Programmers Universal Programmers Part No Description Price Dataman 40Pro Universal ISP Universal 40-pin chip programmer with ISP capabilities and USB 2.0 connectivity. Dataman 40Pro is a small, fast and powerful programmer $595.00 Programmer supporting over 37,000 programmable devices. The 40Pro is built to meet the demands of development labs and field engineers for universal and portable programming. Dataman 48Pro2 Super Fast Universal Super fast universal 48-pin chip programmer with ISP capabilities and USB 2.0 connectivity. Dataman 48Pro2 can program without the need for $1,195.00 ISP Programmer a family-specific module, giving you the freedom to choose the optimal device for your design. The 48Pro2 is built to meet the demands of development labs and field engineers for super fast universal programming. Dataman 48Pro2AP Super Fast Industrial Super fast industrial universal programmer with ISP capabilities and USB 2.0 connectivity. The 48Pro2AP is built to meet the demands of Call for price Universal Programmer production programming with automated handlers and ATE machines.Supporting over 81,000 devices with new support being added monthly, the Dataman 48Pro2AP gives you the freedom to choose the optimal device for your requirements. Dataman 48Pro2C Super Fast Universal Super fast universal 48-pin chip programmer with ISP capabilities and USB 2.0 connectivity. Dataman 48Pro2C can program without the need $995.00 ISP Programmer for a family-specific module, giving you the freedom to choose the optimal device for your design. -

Arm Cortex M0 Instruction Set
Arm cortex m0 instruction set Continue Unfortunately, your browser is not supported. We recommend upgrading your browser. We've done everything we can to make all the documentation and resources available on older versions of Internet Explorer, but the support for vector images and layout can be suboptimal. Technical documentation is available in PDF Download format. The Arm Cortex-M0 processor is one of the smallest Arm processors available. The Cortex-M0 has an exceptionally small silicon area, low power and minimal code footprint, allowing developers to achieve 32-bit performance at an 8-bit price, bypassing a step toward 16-bit devices. The ultra-low countdown gate processor allows it to be deployed in analog and mixed signaling devices. Arm Cortex-M0 Processor Architecture Armv6-M Bus Interface AHB-Lite, von Neumann Bus Architecture ISA Support Thumb / Thumb-2 Subset Pipeline 3-Stage Bit Manipulation Bit Strip Area can be implemented with Corstone Foundation IP interrupts non-masked interruption (NMI) 32 Physical Interrupts Wakeup Interruption Controller Additional Advanced Instructions Equipment One Cycle (32x32) multiply the version sleep modes Integrated WFI and WFE Instructions and Sleep On Exit Sleep And Deep Sleep Signals Extra Retention Mode with Arm Power Management Kit Debug Extra JTAG and Serial Wire Deb debugging ports. Up to 4 break points and 2 2.33 CoreMark/MHz efficiency points and 0.89/1.02/1.27 DMIPS/MHz. typical 1.8v, 25'C) 90LP (7-track, typical 1.2v, 25'C) 40LP (9-track, typical 1.1v, 25 degrees Celsius) Dynamic power floor of the planned area - See: EEMBC Benchmark Viewer Rating - The first result complies with all the basic rules set out in the Dhrystone documentation, the second allows inlining functions, not just permitted C-line libraries, while the third additionally allows for simultaneous (multi-file) compilation. -

Smartfusion Evaluation Kit User's Guide
SmartFusion Evaluation Kit User’s Guide Actel Corporation, Mountain View, CA 94043 © 2010 Actel Corporation. All rights reserved. Printed in the United States of America Part Number: 50200209-3 Release: October 2010 No part of this document may be copied or reproduced in any form or by any means without prior written consent of Actel. Actel makes no warranties with respect to this documentation and disclaims any implied warranties of merchantability or fitness for a particular purpose. Information in this document is subject to change without notice. Actel assumes no responsibility for any errors that may appear in this document. This document contains confidential proprietary information that is not to be disclosed to any unauthorized person without prior written consent of Actel Corporation. Trademarks Actel, IGLOO, Actel Fusion, ProASIC, Libero, Pigeon Point and the associated logos are trademarks or registered trademarks of Actel Corporation. All other trademarks and service marks are the property of their respective owners. SmartFusion Evaluation Kit Table of Contents Introduction . 5 Kit Contents . 5 Board Description . 6 1 Installation and Settings . 7 Software Installation . 7 Jumpers, Switches, and LED Settings . 7 Testing the Hardware . 9 2 Hardware Components . 11 FPGA Description and Connections . 11 I/O Pin Connections . 13 SmartFusion FPGA Hard ARM Cortex-M3 . 14 Power Sources . 14 3 Component Descriptions and Connections . 15 VAREF Connections . 15 Current Sensing Circuit . 15 PWM Circuit . 16 Push-Button System Reset . 16 Push-Button Switches and User LEDs . 17 User I/Os . 18 OLED Display . 18 SPI Flash . 20 20 MHz Oscillator . 20 32.768 KHz (low power) Oscillator . -
Introduction to Smartfusion Intelligent Mixed Signal Fpgas Webinar
™ Intelligent Mixed Signal FPGA Rajiv Nema [email protected] Sr. Product marketing Manager, Actel Corporation May 11th, 2010 Agenda Introduction to SmartFusion Deeper Look inside SmartFusion SmartFusion Software & Eco-System SmartFusion Hardware Kits SmartFusion Solutions Actel Corporation Confidential © 2010 2 SmartFusion: Innovative, Intelligent, Integration Proven FPGA fabric Complete ARM® Cortex™-M3 MCU subsystem...& it’s ‘hard’ Programmable analog In a flash-based device In production now! Offers full customization, IP protection and ease-of-use Actel Corporation Confidential © 2010 3 The Actel Embedded Advantage Flash-based FPGA SRAM-based FPGA ARM Cortex-M3 Needs external flash processor with its own memory CODE STORAGE embedded flash memory On-chip nonvolatile Needs external FPGA configuration CONFIGURATION configuration devices High-voltage analog co- Standard CMOS process exists with digital circuits not conducive to high ANALOG voltage analog Flash Technology Enables Innovative, Intelligent Integration Actel Corporation Confidential © 2010 4 Target Applications & Market Segments Applications Segments System Management Industrial Power Management Medical Motor Control Energy Industrial Networking Communications ….and more ….and more Medical Low Vision Imaging Motor Control Diagnostic Datacenter Viewers Actel Corporation Confidential © 2010 5 Customer Engagement To-Date: Some Applications Battery Operated EKG/ECG Servers and Switches Ind controllers: Motion, Process & Safety Synchronized Train Computers System -

NXP Lab: Cortex-M3 Training with Serial Wire Viewer LPC1768/65: Keil MCB1700 Evaluation Board
NXP lab: Cortex-M3 Training with Serial Wire Viewer LPC1768/65: Keil MCB1700 evaluation board Summer 2010 Version 2.0 by Robert Boys, [email protected] Introduction: The purpose of this lab is to introduce you to the NXP Cortex™-M3 processor using the ARM® Keil™ MDK toolkit featuring μVision®. We will use the Serial Wire Viewer (SWV) on the LPC1768 or LPC1765. At the end of this tutorial, you will be able to confidently work with these processors and Keil MDK. Keil MDK supports all NXP ARM processors including ETM support. Check the Keil Device Database® on www.keil.com/dd for the complete list of NXP support. A similar lab is available for the STMicroelectronics STM32 and the Actel SmartFusion. SWV allows real-time (no CPU cycles stolen) display of memory and variables, data reads and writes, exception events and program counter sampling plus some CPU event counters. ETM adds all the program counter values and is controlled with triggers and filters. SWV is supported by the Keil ULINK2, ULINK-ME and Segger J-Link adapters. ETM Trace is supported with either the ULINKpro, the Signum JtagJetTrace, or Segger J-Trace (under development). Keil MDK comes in an evaluation version that limits code and data size to 32 Kbytes. Nearly all Keil examples will compile within this 32K limit. The addition of a license number will turn it into the full, unrestricted version. Contact Keil sales for a temporary full version license if you need to evaluate at greater than 32K. Keil also provides RL-ARM. This package includes the source files for the RTX RTOS, a TCP/IP stack, CAN drivers, a Flash file system and USB drivers. -

Circuit Cellar, We Pride Ourselves on Providing Readers C
Cover - 242-out_Layout 1 8/12/2010 3:41 PM Page 1 Design a Low-Cost Alternative to Mobile Phones, p. 36 | Rapid Prototyping with mbed, p. 44 THE MAGAZINE FOR COMPUTER APPLICATIONS September 2010 Issue 242 Data Transmission, Gathering, and Decoding Robust Design, Uncertainty Management How to Build a Precision Temperature Controller A Reexamination of State Machines MCU + FPGA “Fusion” PLUS INTERDISCIPLINARY ENGINEERING An Academic Uses His Electrical Engineering Skills for Application Development in Fields Ranging from Neurobiology to Computer Science $7.50 U.S. ($8.50 Canada) www.circuitcellar.com C2_Layout 1 8/11/2010 11:02 AM Page 1 Low-cost Industrial Serial to Ethernet Solutions t*OTUBOUMZOFUXPSLFOBCMFBOZTFSJBMEFWJDF t/PQSPHSBNNJOHJTSFRVJSFEGPSTFSJBMUP&UIFSOFUBQQMJDBUJPO t$VTUPNJ[FUPTVJUBOZBQQMJDBUJPOXJUIBEFWFMPQNFOULJU SBL2e Chip SBL2e 200 SBL2e 100 QPSUTFSJBMUP&UIFSOFUTFSWFS QPSUTFSJBMUP&UIFSOFUTFSWFS QPSUTFSJBMUP&UIFSOFUTFSWFS XJUIFJHIU"%DPOWFSUFSJOQVUT XJUIGPVS"%DPOWFSUFSJOQVUT XJUIGPVS"%DPOWFSUFSJOQVUT BOEPQUJPOBM41* *$ $"/ PQUJPOBM*$QFSJQIFSBMTVQQPSU PQUJPOBM*$QFSJQIFSBMTVQQPSU QFSJQIFSBMEFWJDFTVQQPSU BOEQJOIFBEFS BOE3+DPOOFDUPS SBL2e X Hardware Features 6QUPUISFFTFSJBMQPSUT .CQT&UIFSOFU VQUPEJHJUBM*0 &YUFSOBMQPSU CJU"%DPOWFSUFST PQFSBUJOHUFNQFSBUVSFUP$ CJUQFSGPSNBODF TFSJBMUP&UIFSOFUTFSWFS XJUI34TVQQPSU Software Features 5$16%15FMOFU)551NPEFT %)$14UBUJD*1TVQQPSU XFCCBTFEPS "5DPNNBOEDPOöHVSBUJPO Low Prices 4#-F$IJQ 2UZL %FWJDF1/4#-F$)*1*3 4#-F 2UZ %FWJDF1/4#-F*3 4#-F 2UZ,%FWJDF1/4#-F*3 4#-F9 2UZ %FWJDF1/4#-F9*3 4#-F9" -
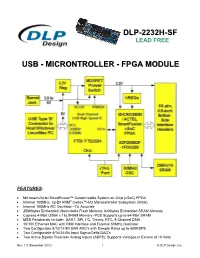
DLP-2232H-SF Module Is a Low-Cost, Compact Prototyping Tool That Can Be Used for Rapid Proof of Concept Or Within Educational Environments
DDLLPP--22223322HH--SSFF LEAD FREE UUSSBB -- MMIICCRROONNTTRROOLLLLEERR -- FFPPGGAA MMOODDUULLEE FEATURES: • Microsemi/Actel SmartFusion™ Customizable System-on-Chip (cSoC) FPGA • Internal 100MHz, 32-Bit ARM® Cortex™-M3 Microcontroller Subsystem (MSS) • Internal 100MHz RC Oscillator--1% Accurate • 256Kbytes Embedded, Nonvolatile Flash Memory; 64Kbytes Embedded SRAM Memory • Cypress 4-Mbit (256K x 16) SRAM Memory--PCB Supports up to 64-Mbit SRAM • MSS Peripherals Include: UART, SPI, I2C, Timers, RTC, 8-Channel DMA • 10/100 Ethernet MAC with RMII Interface and External 50MHz Oscillator • Two Configurable 8/10/12-Bit SAR ADC’s with Sample Rates up to 600KSPS • Two Configurable 8/16/24-Bit Input Sigma-Delta DAC’s • Two Active Bipolar Prescaler Analog Inputs (ABPS); Supports Voltages in Excess of 10 Volts Rev. 1.0 (December 2012) 1 © DLP Design, Inc. • Internal 2.56V Reference or Optional External Reference • FPGA Fabric Includes 4,608 Tiles and 36,864 Bits of Block RAM • 14 Analog Inputs; 2 Analog Outputs; 16 MSS/GPIO I/O’s, 10 MSS/FPGA I/O’s • Analog Compute Engine (ACE) Supports Digital Filtering, Transformations and Threshold Flags • Complete Combined USB Microcontroller-FPGA Reference Design Provided • USB Port Powered or 5V External Power Barrel Jack • USB 1.1- and 2.0-Compatible Interface • Small Footprint: 3.0 x 1.2-Inch PCB and Standard 50-Pin, 0.9-Inch DIP Interface APPLICATIONS: • Rapid Prototyping • Educational Tool • Industrial/Process Control • Data Acquisition/Processing • Embedded Processor 1.0 INTRODUCTION The DLP-2232H-SF module is a low-cost, compact prototyping tool that can be used for rapid proof of concept or within educational environments.