Flight Safety Analysis Handbook
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Weather and Aviation: How Does Weather Affect the Safety and Operations of Airports and Aviation, and How Does FAA Work to Manage Weather-Related Effects?
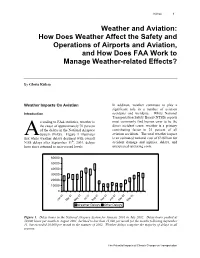
Kulesa 1 Weather and Aviation: How Does Weather Affect the Safety and Operations of Airports and Aviation, and How Does FAA Work to Manage Weather-related Effects? By Gloria Kulesa Weather Impacts On Aviation In addition, weather continues to play a significant role in a number of aviation Introduction accidents and incidents. While National Transportation Safety Board (NTSB) reports ccording to FAA statistics, weather is most commonly find human error to be the the cause of approximately 70 percent direct accident cause, weather is a primary of the delays in the National Airspace contributing factor in 23 percent of all System (NAS). Figure 1 illustrates aviation accidents. The total weather impact that while weather delays declined with overall is an estimated national cost of $3 billion for NAS delays after September 11th, 2001, delays accident damage and injuries, delays, and have since returned to near-record levels. unexpected operating costs. 60000 50000 40000 30000 20000 10000 0 1 01 01 0 01 02 02 ul an 01 J ep an 02 J Mar May S Nov 01 J Mar May Weather Delays Other Delays Figure 1. Delay hours in the National Airspace System for January 2001 to July 2002. Delay hours peaked at 50,000 hours per month in August 2001, declined to less than 15,000 per month for the months following September 11, but exceeded 30,000 per month in the summer of 2002. Weather delays comprise the majority of delays in all seasons. The Potential Impacts of Climate Change on Transportation 2 Weather and Aviation: How Does Weather Affect the Safety and Operations of Airports and Aviation, and How Does FAA Work to Manage Weather-related Effects? Thunderstorms and Other Convective In-Flight Icing. -

Prepared by Textore, Inc. Peter Wood, David Yang, and Roger Cliff November 2020
AIR-TO-AIR MISSILES CAPABILITIES AND DEVELOPMENT IN CHINA Prepared by TextOre, Inc. Peter Wood, David Yang, and Roger Cliff November 2020 Printed in the United States of America by the China Aerospace Studies Institute ISBN 9798574996270 To request additional copies, please direct inquiries to Director, China Aerospace Studies Institute, Air University, 55 Lemay Plaza, Montgomery, AL 36112 All photos licensed under the Creative Commons Attribution-Share Alike 4.0 International license, or under the Fair Use Doctrine under Section 107 of the Copyright Act for nonprofit educational and noncommercial use. All other graphics created by or for China Aerospace Studies Institute Cover art is "J-10 fighter jet takes off for patrol mission," China Military Online 9 October 2018. http://eng.chinamil.com.cn/view/2018-10/09/content_9305984_3.htm E-mail: [email protected] Web: http://www.airuniversity.af.mil/CASI https://twitter.com/CASI_Research @CASI_Research https://www.facebook.com/CASI.Research.Org https://www.linkedin.com/company/11049011 Disclaimer The views expressed in this academic research paper are those of the authors and do not necessarily reflect the official policy or position of the U.S. Government or the Department of Defense. In accordance with Air Force Instruction 51-303, Intellectual Property, Patents, Patent Related Matters, Trademarks and Copyrights; this work is the property of the U.S. Government. Limited Print and Electronic Distribution Rights Reproduction and printing is subject to the Copyright Act of 1976 and applicable treaties of the United States. This document and trademark(s) contained herein are protected by law. This publication is provided for noncommercial use only. -

Project Number: JMW-USC1
Project Number: JMW-USC1 Department of Social Science and Policy Studies THE FUTURE OF UNMANNED SPACE: A SPECULATIVE ANALYSIS OF THE COMMERCIAL MARKET An Interactive Qualifying Project Report: Submitted to the Faculty of the WORCESTER POLYTECHNIC INSTITUTE in partial fulfillment of the requirements for the Degree of Bachelor of Science by ______________________________ Peter Brayshaw ______________________________ Brooks Farnham ______________________________ Jon Leslie December 16, 2004 _____________________________ ________________________________ Professor John M. Wilkes, Advisor Professor Peter Campisano, Co-Advisor Abstract: This report is one of many which deal with the unmanned space race. It is a prediction of who will have the greatest competitive advantage in the commercial market over the next 25 years, based on historical analogy. Background information on Russia, China, Japan, the United States and the European Space Agency, including the launch vehicles and launch services each provides, is covered. The new prospect of space platforms is also investigated. 2 Table of Contents Abstract: ...................................................................................................... 2 Table of Contents ......................................................................................... 3 Introduction ................................................................................................. 5 Literature Review ...................................................................................... 5 Project -
Contingency Shuttle Crew Support (Cscs)/Rescue Flight Resource Book
CSCS/Rescue Flight Resource Book JSC-62900 CONTINGENCY SHUTTLE CREW SUPPORT (CSCS)/RESCUE FLIGHT RESOURCE BOOK OVERVIEW 1 Mission Operations CSCS 2 Directorate RESCUE 3 FLIGHT DA8/Flight Director Office Final July 12, 2005 National Aeronautics and Space Administration Lyndon B. Johnson Space Center Houston, Texas FINAL 07/12/05 2-i Verify this is the correct version before using. CSCS/Rescue Flight Resource Book JSC-62900 CONTINGENCY SHUTTLE CREW SUPPORT (CSCS)/RESCUE FLIGHT RESOURCE BOOK FINAL JULY 12, 2005 PREFACE This document, dated May 24, 2005, is the Basic version of the Contingency Shuttle Crew Support (CSCS)/Rescue Flight Resource Book. It is requested that any organization having comments, questions, or suggestions concerning this document should contact DA8/Book Manager, Flight Director Office, Building 4 North, Room 3039. This is a limited distribution and controlled document and is not to be reproduced without the written approval of the Chief, Flight Director Office, mail code DA8, Lyndon B. Johnson Space Center, Houston, TX 77058. FINAL 07/12/05 2-ii Verify this is the correct version before using. CSCS/Rescue Flight Resource Book JSC-62900 1.0 - OVERVIEW Section 1.0 is the overview of the entire Contingency Shuttle Crew Support (CSCS)/Rescue Flight Resource Book. FINAL 07/12/05 2-iii Verify this is the correct version before using. CSCS/Rescue Flight Resource Book JSC-62900 This page intentionally blank. FINAL 07/12/05 2-iv Verify this is the correct version before using. CSCS/Rescue Flight Resource Book JSC-62900 2.0 - CONTINGENCY SHUTTLE CREW SUPPORT (CSCS) 2.1 Procedures Overview.......................................................................................................2-1 2.1.1 ................................................................................ -

Water Rocket Booklet
A guide to building and understanding the physics of Water Rockets Version 1.02 June 2007 Warning: Water Rocketeering is a potentially dangerous activity and individuals following the instructions herein do so at their own risk. Exclusion of liability: NPL Management Limited cannot exclude the risk of accident and, for this reason, hereby exclude, to the maximum extent permissible by law, any and all liability for loss, damage, or harm, howsoever arising. Contents WATER ROCKETS SECTION 1: WHAT IS A WATER ROCKET? 1 SECTION 3: LAUNCHERS 9 SECTION 4: OPTIMISING ROCKET DESIGN 15 SECTION 5: TESTING YOUR ROCKET 24 SECTION 6: PHYSICS OF A WATER ROCKET 29 SECTION 7: COMPUTER SIMULATION 32 SECTION 8: SAFETY 37 SECTION 9: USEFUL INFORMATION 38 SECTION 10: SOME INTERESTING DETAILS 40 Copyright and Reproduction Michael de Podesta hereby asserts his right to be identified as author of this booklet. The copyright of this booklet is owned by NPL. Michael de Podesta and NPL grant permission to reproduce the booklet in part or in whole for any not-for-profit educational activity, but you must acknowledge both the author and the copyright owner. Acknowledgements I began writing this guide to support people entering the NPL Water Rocket Competition. So the first acknowledgement has to be to Dr. Nick McCormick, who founded the competition many years ago and who is still the driving force behind the activity at NPL. Nick’s instinct for physics and fun has brought pleasure to thousands. The inspiration to actually begin writing this document instead of just saying that someone ought to do it, was provided by Andrew Hanson. -

Special Catalogue Milestones of Lunar Mapping and Photography Four Centuries of Selenography on the Occasion of the 50Th Anniversary of Apollo 11 Moon Landing
Special Catalogue Milestones of Lunar Mapping and Photography Four Centuries of Selenography On the occasion of the 50th anniversary of Apollo 11 moon landing Please note: A specific item in this catalogue may be sold or is on hold if the provided link to our online inventory (by clicking on the blue-highlighted author name) doesn't work! Milestones of Science Books phone +49 (0) 177 – 2 41 0006 www.milestone-books.de [email protected] Member of ILAB and VDA Catalogue 07-2019 Copyright © 2019 Milestones of Science Books. All rights reserved Page 2 of 71 Authors in Chronological Order Author Year No. Author Year No. BIRT, William 1869 7 SCHEINER, Christoph 1614 72 PROCTOR, Richard 1873 66 WILKINS, John 1640 87 NASMYTH, James 1874 58, 59, 60, 61 SCHYRLEUS DE RHEITA, Anton 1645 77 NEISON, Edmund 1876 62, 63 HEVELIUS, Johannes 1647 29 LOHRMANN, Wilhelm 1878 42, 43, 44 RICCIOLI, Giambattista 1651 67 SCHMIDT, Johann 1878 75 GALILEI, Galileo 1653 22 WEINEK, Ladislaus 1885 84 KIRCHER, Athanasius 1660 31 PRINZ, Wilhelm 1894 65 CHERUBIN D'ORLEANS, Capuchin 1671 8 ELGER, Thomas Gwyn 1895 15 EIMMART, Georg Christoph 1696 14 FAUTH, Philipp 1895 17 KEILL, John 1718 30 KRIEGER, Johann 1898 33 BIANCHINI, Francesco 1728 6 LOEWY, Maurice 1899 39, 40 DOPPELMAYR, Johann Gabriel 1730 11 FRANZ, Julius Heinrich 1901 21 MAUPERTUIS, Pierre Louis 1741 50 PICKERING, William 1904 64 WOLFF, Christian von 1747 88 FAUTH, Philipp 1907 18 CLAIRAUT, Alexis-Claude 1765 9 GOODACRE, Walter 1910 23 MAYER, Johann Tobias 1770 51 KRIEGER, Johann 1912 34 SAVOY, Gaspare 1770 71 LE MORVAN, Charles 1914 37 EULER, Leonhard 1772 16 WEGENER, Alfred 1921 83 MAYER, Johann Tobias 1775 52 GOODACRE, Walter 1931 24 SCHRÖTER, Johann Hieronymus 1791 76 FAUTH, Philipp 1932 19 GRUITHUISEN, Franz von Paula 1825 25 WILKINS, Hugh Percy 1937 86 LOHRMANN, Wilhelm Gotthelf 1824 41 USSR ACADEMY 1959 1 BEER, Wilhelm 1834 4 ARTHUR, David 1960 3 BEER, Wilhelm 1837 5 HACKMAN, Robert 1960 27 MÄDLER, Johann Heinrich 1837 49 KUIPER Gerard P. -

Ballistic Coefficient Testing of the Berger .308 155
Ballistic Coefficient Testing of the Berger .308 155 grain VLD By: Bryan Litz Introduction The purpose of this article is to discuss the ballistics of the Berger .30 caliber 155 grain VLD as measured by firing tests. Such thorough and precise firing tests are a rare commodity for the sporting arms industry. As tempting as it is to dive into the interesting topic of the test itself, only limited discussion is provided on the actual test procedures. The main focus will be on the results of the tests. So why go to the effort of measuring ballistic coefficient (BC) when the manufacturer provides it for us? The short answer is: because the manufacturers advertised BC is often inaccurate. Most manufacturers use some kind of computer program to predict the BC. Few manufacturers actually test fire their bullets to get BC, and when they do, test methods vary between manufacturers. The various methods used by the bullet manufacturers to establish BC’s makes it very hard to compare bullets of different brands. This inconsistency has resulted in much confusion over the years to the point that many shooters give up on the notion that BC is a useful number at all! Apparently, it would be a great benefit to the shooting community to have a single, unbiased third-party applying the same testing method to measure the BC of all bullets, and that is my motivation. Armed with truly accurate BC’s, match shooters will finally be able to compare ‘apples-to-apples’ when choosing a bullet to use in windy competitions. -

Atlas Launch System Mission Planner's Guide, Atlas V Addendum
ATLAS Atlas Launch System Mission Planner’s Guide, Atlas V Addendum FOREWORD This Atlas V Addendum supplements the current version of the Atlas Launch System Mission Plan- ner’s Guide (AMPG) and presents the initial vehicle capabilities for the newly available Atlas V launch system. Atlas V’s multiple vehicle configurations and performance levels can provide the optimum match for a range of customer requirements at the lowest cost. The performance data are presented in sufficient detail for preliminary assessment of the Atlas V vehicle family for your missions. This guide, in combination with the AMPG, includes essential technical and programmatic data for preliminary mission planning and spacecraft design. Interface data are in sufficient detail to assess a first-order compatibility. This guide contains current information on Lockheed Martin’s plans for Atlas V launch services. It is subject to change as Atlas V development progresses, and will be revised peri- odically. Potential users of Atlas V launch service are encouraged to contact the offices listed below to obtain the latest technical and program status information for the Atlas V development. For technical and business development inquiries, contact: COMMERCIAL BUSINESS U.S. GOVERNMENT INQUIRIES BUSINESS INQUIRIES Telephone: (691) 645-6400 Telephone: (303) 977-5250 Fax: (619) 645-6500 Fax: (303) 971-2472 Postal Address: Postal Address: International Launch Services, Inc. Commercial Launch Services, Inc. P.O. Box 124670 P.O. Box 179 San Diego, CA 92112-4670 Denver, CO 80201 Street Address: Street Address: International Launch Services, Inc. Commercial Launch Services, Inc. 101 West Broadway P.O. Box 179 Suite 2000 MS DC1400 San Diego, CA 92101 12999 Deer Creek Canyon Road Littleton, CO 80127-5146 A current version of this document can be found, in electronic form, on the Internet at: http://www.ilslaunch.com ii ATLAS LAUNCH SYSTEM MISSION PLANNER’S GUIDE ATLAS V ADDENDUM (AVMPG) REVISIONS Revision Date Rev No. -

Spacecraft Guidance Techniques for Maximizing Mission Success
Utah State University DigitalCommons@USU All Graduate Theses and Dissertations Graduate Studies 5-2014 Spacecraft Guidance Techniques for Maximizing Mission Success Shane B. Robinson Utah State University Follow this and additional works at: https://digitalcommons.usu.edu/etd Part of the Mechanical Engineering Commons Recommended Citation Robinson, Shane B., "Spacecraft Guidance Techniques for Maximizing Mission Success" (2014). All Graduate Theses and Dissertations. 2175. https://digitalcommons.usu.edu/etd/2175 This Dissertation is brought to you for free and open access by the Graduate Studies at DigitalCommons@USU. It has been accepted for inclusion in All Graduate Theses and Dissertations by an authorized administrator of DigitalCommons@USU. For more information, please contact [email protected]. SPACECRAFT GUIDANCE TECHNIQUES FOR MAXIMIZING MISSION SUCCESS by Shane B. Robinson A dissertation submitted in partial fulfillment of the requirements for the degree of DOCTOR OF PHILOSOPHY in Mechanical Engineering Approved: Dr. David K. Geller Dr. Jacob H. Gunther Major Professor Committee Member Dr. Warren F. Phillips Dr. Charles M. Swenson Committee Member Committee Member Dr. Stephen A. Whitmore Dr. Mark R. McLellan Committee Member Vice President for Research and Dean of the School of Graduate Studies UTAH STATE UNIVERSITY Logan, Utah 2013 [This page intentionally left blank] iii Copyright c Shane B. Robinson 2013 All Rights Reserved [This page intentionally left blank] v Abstract Spacecraft Guidance Techniques for Maximizing Mission Success by Shane B. Robinson, Doctor of Philosophy Utah State University, 2013 Major Professor: Dr. David K. Geller Department: Mechanical and Aerospace Engineering Traditional spacecraft guidance techniques have the objective of deterministically min- imizing fuel consumption. -

GLONASS Spacecraft
INNO V AT IO N The task of designing and developing the GLONASS GLONASS spacecraft fell to the Scientific Production Association of Applied Mechan ics (Nauchno Proizvodstvennoe Ob"edinenie Spacecraft Prikladnoi Mekaniki or NPO PM) , located near Krasnoyarsk in Siberia. This major aero Nicholas L. Johnson space industrial complex was established in 1959 as a division of Sergei Korolev 's Kaman Sciences Corporation Expe1imental Design Bureau (Opytno Kon struktorskoe Byuro or OKB). (Korolev , among other notable achievements , led the Fourteen years after the launch of the effort to develop the Soviet Union's first first test spacecraft, the Russian Global Nav launch vehicle - the A launcher - which igation Satellite System (Global 'naya Navi placed Sputnik 1 into orbit.) The founding gatsionnaya Sputnikovaya Sistema or and current general director and chief GLONASS) program remains viable and designer is Mikhail Fyodorovich Reshetnev, essentially on schedule despite the economic one of only two still-active chief designers and political turmoil surrounding the final from Russia's fledgling 1950s-era space years of the Soviet Union and the emergence program. of the Commonwealth of Independent States A closed facility until the early 1990s, (CIS). By the summer of 1994, a total of 53 NPO PM has been responsible for all major GLONASS spacecraft had been successfully Russian operational communications, navi Despite the significant economic hardships deployed in nearly semisynchronous orbits; gation, and geodetic satellite systems to associated with the breakup of the Soviet Union of the 53 , nearly 12 had been normally oper date. Serial (or assembly-line) production of and the transition to a modern market economy, ational since the establishment of the Phase I some spacecraft, including Tsikada and Russia continues to develop its space programs, constellation in 1990. -

Atlas V Cutaway Poster
ATLAS V Since 2002, Atlas V rockets have delivered vital national security, science and exploration, and commercial missions for customers across the globe including the U.S. Air Force, the National Reconnaissance Oice and NASA. 225 ft The spacecraft is encapsulated in either a 5-m (17.8-ft) or a 4-m (13.8-ft) diameter payload fairing (PLF). The 4-m-diameter PLF is a bisector (two-piece shell) fairing consisting of aluminum skin/stringer construction with vertical split-line longerons. The Atlas V 400 series oers three payload fairing options: the large (LPF, shown at left), the extended (EPF) and the extra extended (XPF). The 5-m PLF is a sandwich composite structure made with a vented aluminum-honeycomb core and graphite-epoxy face sheets. The bisector (two-piece shell) PLF encapsulates both the Centaur upper stage and the spacecraft, which separates using a debris-free pyrotechnic actuating 200 ft system. Payload clearance and vehicle structural stability are enhanced by the all-aluminum forward load reactor (FLR), which centers the PLF around the Centaur upper stage and shares payload shear loading. The Atlas V 500 series oers 1 three payload fairing options: the short (shown at left), medium 18 and long. 1 1 The Centaur upper stage is 3.1 m (10 ft) in diameter and 12.7 m (41.6 ft) long. Its propellant tanks are constructed of pressure-stabilized, corrosion-resistant stainless steel. Centaur is a liquid hydrogen/liquid oxygen-fueled vehicle. It uses a single RL10 engine producing 99.2 kN (22,300 lbf) of thrust. -
Trade Studies Towards an Australian Indigenous Space Launch System
TRADE STUDIES TOWARDS AN AUSTRALIAN INDIGENOUS SPACE LAUNCH SYSTEM A thesis submitted for the degree of Master of Engineering by Gordon P. Briggs B.Sc. (Hons), M.Sc. (Astron) School of Engineering and Information Technology, University College, University of New South Wales, Australian Defence Force Academy January 2010 Abstract During the project Apollo moon landings of the mid 1970s the United States of America was the pre-eminent space faring nation followed closely by only the USSR. Since that time many other nations have realised the potential of spaceflight not only for immediate financial gain in areas such as communications and earth observation but also in the strategic areas of scientific discovery, industrial development and national prestige. Australia on the other hand has resolutely refused to participate by instituting its own space program. Successive Australian governments have preferred to obtain any required space hardware or services by purchasing off-the-shelf from foreign suppliers. This policy or attitude is a matter of frustration to those sections of the Australian technical community who believe that the nation should be participating in space technology. In particular the provision of an indigenous launch vehicle that would guarantee the nation independent access to the space frontier. It would therefore appear that any launch vehicle development in Australia will be left to non- government organisations to at least define the requirements for such a vehicle and to initiate development of long-lead items for such a project. It is therefore the aim of this thesis to attempt to define some of the requirements for a nascent Australian indigenous launch vehicle system.