A New Image Registration Method Robust to Noise ∑∑ ∑∑
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Grey Noise, Dubai Unit 24, Alserkal Avenue Street 8, Al Quoz 1, Dubai
Grey Noise, Dubai Stéphanie Saadé b. 1983, Lebanon Lives and works between Beirut, Paris and Amsterdam Education and Residencies 2018 - 2019 3 Package Deal, 1 year “Interhistoricity” (Scholarship received from the AmsterdamFonds Voor Kunst and the Bureau Broedplaatsen), In partnership with Museum Van Loon Oude Kerk, Castrum Peregrini and Reinwardt Academy, Amsterdam, Netherlands 2018 Studio Cur’art and Bema, Mexico City and Guadalajara 2017 – 2018 Maison Salvan, Labège, France Villa Empain, Fondation Boghossian, Brussels, Belgium 2015 – 2016 Cité Internationale des Arts, Paris, France (Recipient of the French Institute residency program scholarship) 2014 – 2015 Jan Van Eyck Academie, Maastricht, The Netherlands 2013 PROGR, Bern, Switzerland 2010 - 2012 China Academy of Arts, Hangzhou, China (State-funded Scholarship for post- graduate program) 2005 – 2010 École Nationale Supérieure des Beaux-Arts, Paris, France (Diplôme National Supérieur d’Arts Plastiques) Awards 2018 Recipient of the 2018 NADA MIAMI Artadia Art Award Selected Solo Exhibitions 2020 (Upcoming) AKINCI Gallery, Amsterdam, Netherlands 2019 The Travels of Here and Now, Museum Van Loon, Amsterdam, Netherlands with the support of Amsterdams fonds voor de Kunst The Encounter of the First and Last Particles of Dust, Grey Noise, Dubai L’espace De 70 Jours, La Scep, Marseille, France Unit 24, Alserkal Avenue Street 8, Al Quoz 1, Dubai, UAE / T +971 4 3790764 F +971 4 3790769 / [email protected] / www.greynoise.org Grey Noise, Dubai 2018 Solo Presentation at Nada Miami with Counter -

ACCESSORIES and BATTERIES MTX Professional Series Portable Two-Way Radios MTX Series
ACCESSORIES AND BATTERIES MTX Professional Series Portable Two-Way Radios MTX Series Motorola Original® Accessories let you make the most of your MTX Professional Series radio’s capabilities. You made a sound business decision when you chose your Motorola MTX Professional Series Two-Way radio. When you choose performance-matched Motorola Original® accessories, you’re making another good call. That’s because every Motorola Original® accessory is designed, built and rigorously tested to the same quality standards as Motorola radios. So you can be sure that each will be ready to do its job, time after time — helping to increase your productivity. After all, if you take a chance on a mismatched battery, a flimsy headset, or an ill-fitting carry case, your radio may not perform at the moment you have to use it. We’re pleased to bring you this collection of proven Motorola Original® accessories for your important business communication needs. You’ll find remote speaker microphones for more convenient control. Discreet earpiece systems to help ensure privacy and aid surveillance. Carry cases for ease when on the move. Headsets for hands-free operation. Premium batteries to extend work time, and more. They’re all ready to help you work smarter, harder and with greater confidence. Motorola MTX Professional Series radios keep you connected with a wider calling range, faster channel access, greater privacy and higher user and talkgroup capacity. MTX PROFESSIONAL SERIES PORTABLE RADIOS TM Intelligent radio so advanced, it practically thinks for you. MTX Series Portable MTX850 Two-Way Radios are the smart choice for your business - delivering everything you need for great business communication. -

Portable Radio: Headsets XTS 3000, XTS 3500, XTS 5000, XTS 1500, XTS 2500, MT 1500, and PR1500
portable radio: headsets XTS 3000, XTS 3500, XTS 5000, XTS 1500, XTS 2500, MT 1500, and PR1500 Noise-Cancelling Headsets with Boom Microphone Ideal for two-way communication in extremely noisy environments. Dual-Muff, tactical headsets RMN4052A include 2 microphones on outside of earcups which reproduce ambient sound back into headset. Harmful sounds are suppressed to safe levels and low sounds are amplified up to 5 times original level, but never more than 82dB. Has on/off volume control on earcups. Easily replaceable ear seals are filled with a liquid and foam combination to provide excellent sealing and comfort. 3-foot coiled cord assembly included. Adapter Cable RKN4095A required. RMN4052A Tactical Headband Style Headset. Grey, Noise reduction = 24dB. RMN4053A Tactical Hardhat Mount Headset. Grey, Noise reduction = 22dB. RKN4095A Adapter Cable with In-Line Push-to-Talk For use with RMN4051B/RMN4052A/RMN4053A. REPLACEMENTEARSEALS RLN4923B Replacement Earseals for RMN4051B/RMN4052A/RMN4053A Includes 2 snap-in earseals. Hardhat Mount Headset With Noise-Cancelling Boom Microphone RMN4051B Ideal for two-way communication in high-noise environments, this headset mounts easily to hard- hats with slots, or can be worn alone. Easily replaceable ear seals are filled with a liquid and foam combination to provide excellent sealing and comfort. 3-foot coiled cord assembly included. Noise reduction of 22dB. Separate In-line PTT Adapter Cable RKN4095A required. Hardhat not included. RMN4051B* Two-way, Hardhat Mount Headset with Noise-Cancelling Boom Microphone. Black. RKN4095A Adapter cable with In-Line PTT. For use with RMN4051B/RMN4052A/RMN4053A. Medium Weight Headsets Medium weight headsets offer high-clarity sound, with the additional hearing protection necessary to provide consistent, clear, two-way radio communication in harsh, noisy environments or situations. -
LPM Woofer Sample Report
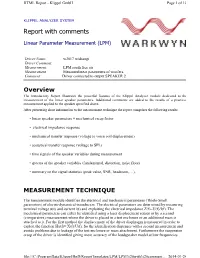
HTML Report - Klippel GmbH Page 1 of 10 KLIPPEL ANALYZER SYSTEM Report with comments Linear Parameter Measurement (LPM) Driver Name: w2017 midrange Driver Comment: Measurement: LPM south free air Measurement Measureslinear parameters of woofers. Comment : Driver connected to output SPEAKER 2. Overview The Introductory Report illustrates the powerful features of the Klippel Analyzer module dedicated to the measurement of the linear speaker parameters. Additional comments are added to the results of a practical measurement applied to the speaker specified above. After presenting short information to the measurement technique the report comprises the following results • linear speaker parameters + mechanical creep factor • electrical impedance response • mechanical transfer response (voltage to voice coil displacement) • acoustical transfer response (voltage to SPL) • time signals of the speaker variables during measurement • spectra of the speaker variables (fundamental, distortion, noise floor) • summary on the signal statistics (peak value, SNR, headroom,…). MEASUREMENT TECHNIQUE The measurement module identifies the electrical and mechanical parameters (Thiele-Small parameters) of electro-dynamical transducers. The electrical parameters are determined by measuring terminal voltage u(t) and current i(t) and exploiting the electrical impedance Z(f)=U(f)/I(f). The mechanical parameters can either be identified using a laser displacement sensor or by a second (comparative) measurement where the driver is placed in a test enclosure or an additional mass is attached to it. For the first method the displacement of the driver diaphragm is measured in order to exploit the function Hx(f)= X(f)/U(f). So the identification dispenses with a second measurement and avoids problems due to leakage of the test enclosure or mass attachment. -

An Introduction to Opensound Navigator™
WHITEPAPER 2016 An introduction to OpenSound Navigator™ HIGHLIGHTS OpenSound Navigator™ is a new speech-enhancement algorithm that preserves speech and reduces noise in complex environments. It replaces and exceeds the role of conventional directionality and noise reduction algorithms. Key technical advances in OpenSound Navigator: • Holistic system that handles all acoustical environments from the quietest to the noisiest and adapts its response to the sound preference of the user – no modes or mode switch. • Integrated directional and noise reduction action – rebalance the sound scene, preserve speech in all directions, and selectively reduce noise. • Two-microphone noise estimate for a “spatially-informed” estimate of the environmental noise, enabling fast and accurate noise reduction. The speed and accuracy of the algorithm enables selective noise reduction without isolating the talker of interest, opening up new possibilities for many audiological benefits. Nicolas Le Goff,Ph.D., Senior Research Audiologist, Oticon A/S Jesper Jensen, Ph.D., Senior Scientist, Oticon A/S; Professor, Aalborg University Michael Syskind Pedersen, Ph.D., Lead Developer, Oticon A/S Susanna Løve Callaway, Au.D., Clinical Research Audiologist, Oticon A/S PAGE 2 WHITEPAPER – 2016 – OPENSOUND NAVIGATOR The daily challenge of communication To make sense of a complex acoustical mixture, the brain in noise organizes the sound entering the ears into different Sounds occur around us virtually all the time and they auditory “objects” that can then be focused on or put in start and stop unpredictably. We constantly monitor the background. The formation of these auditory objects these changes and choose to interact with some of the happens by assembling sound elements that have similar sounds, for instance, when engaging in a conversation features (e.g., Bregman, 1990). -

Information Theory
Information Theory Professor John Daugman University of Cambridge Computer Science Tripos, Part II Michaelmas Term 2016/17 H(X,Y) I(X;Y) H(X|Y) H(Y|X) H(X) H(Y) 1 / 149 Outline of Lectures 1. Foundations: probability, uncertainty, information. 2. Entropies defined, and why they are measures of information. 3. Source coding theorem; prefix, variable-, and fixed-length codes. 4. Discrete channel properties, noise, and channel capacity. 5. Spectral properties of continuous-time signals and channels. 6. Continuous information; density; noisy channel coding theorem. 7. Signal coding and transmission schemes using Fourier theorems. 8. The quantised degrees-of-freedom in a continuous signal. 9. Gabor-Heisenberg-Weyl uncertainty relation. Optimal \Logons". 10. Data compression codes and protocols. 11. Kolmogorov complexity. Minimal description length. 12. Applications of information theory in other sciences. Reference book (*) Cover, T. & Thomas, J. Elements of Information Theory (second edition). Wiley-Interscience, 2006 2 / 149 Overview: what is information theory? Key idea: The movements and transformations of information, just like those of a fluid, are constrained by mathematical and physical laws. These laws have deep connections with: I probability theory, statistics, and combinatorics I thermodynamics (statistical physics) I spectral analysis, Fourier (and other) transforms I sampling theory, prediction, estimation theory I electrical engineering (bandwidth; signal-to-noise ratio) I complexity theory (minimal description length) I signal processing, representation, compressibility As such, information theory addresses and answers the two fundamental questions which limit all data encoding and communication systems: 1. What is the ultimate data compression? (answer: the entropy of the data, H, is its compression limit.) 2. -

Vicinity of Canadian Airports
THE I]NIVERSITY OF MANITOBA LAND_USE PLANNING IN THE VICINITY OF CANADIAN AIRPORTS by DONALD H. DRACKLEY A THESTS SUBMITTED TO THE DEPARTMENT OF CITY PLANNING rN PARTIAI FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF MASTER OF CITY PLANNING DEPARTMENT OF CITY PLANNING I^IINNIPEG, MANITOBA OCTOBER, l9BO LAND_UST PLANNING iN THE VICINITY OF CANADIAN AIRPORTS BY DONALD HERBERT DRACKLEY A the sis sLrblllitted to the IracLrlty of'Gradrrate Studies ol the Utliversity of Manitoba in partial lLrllillnlent of the requirerrients of tlle degree of I'IASTTR OF CiTY PLANNTNG ovl9B0 Pennission has been granted to the LIBIìAIìY OF TI-IE UNIVER- SITY OIr MANITOBA to le nd or sell co¡rics of this thesis, to tlte NATIONAL LIBRARY OF CANADA to microlilrn this tltesis and to lend or sell copics of'the t'ilm, and UNIVERSITY MICROIìILMS to pLrblish an abstract ot'this thesis. The aLrthor reserves otlier prrblication rights, allcl lrcithcr the thcsis nor cxtellsive extracts f¡-onl it ntay be printer.l or other- wise reprodLrced withotrt the aLrthor's written ¡rerntission. -ii- PRtrFACE The ímportance of aír transportation on a national and ínternational scale ís an indíspurable fact, but at the same time it must-,be admitted that the impact of airport activities has raised substantial questions concerning their desírabilíty in urban or rural areas. The problems of noise, property devaluatíon and land use control, for example, have only recently been considered. As a result, this thesÍs will address ítself to land-use planning in the vicinity of airports. It Ís hoped that by review- ing problems and analysing present responses, alternatíve land-use planníng technÍques may be suggested which recognize the symbioËic relationship of aírports and surroundíng areas The disturbances caused by airport operations adversely affect those r"rho live or r¡rork ín the írnmedíate vicinity. -

3A Whatissound Part 2
What is Sound? Part II Timbre & Noise Prayouandi (2010) - OneOhtrix Point Never 1 PSYCHOACOUSTICS ACOUSTICS LOUDNESS AMPLITUDE PITCH FREQUENCY QUALITY TIMBRE 2 Timbre / Quality everything that is not frequency / pitch or amplitude / loudness envelope - the attack, sustain, and decay portions of a sound spectra - the aggregate of simple waveforms (partials) that make up the frequency space of a sound. noise - the inharmonic and unpredictable fuctuations in the sound / signal 3 envelope 4 envelope ADSR 5 6 Frequency Spectrum 7 Spectral Analysis 8 Additive Synthesis 9 Organ Harmonics 10 Spectral Analysis 11 Cancellation and Reinforcement In-phase, out-of-phase and composite wave forms 12 (max patch) Tone as the sum of partials 13 harmonic / overtone series the fundamental is the lowest partial - perceived pitch A harmonic partial conforms to the overtone series which are whole number multiples of the fundamental frequency(f) (f)1, (f)2, (f)3, (f)4, etc. if f=110 110, 220, 330, 440 doubling = 1 octave An inharmonic partial is outside of the overtone series, it does not have a whole number multiple relationship with the fundamental. 14 15 16 Basic Waveforms fundamental only, no additional harmonics odd partials only (1,3,5,7...) 1 / p2 (3rd partial has 1/9 the energy of the fundamental) all partials 1 / p (3rd partial has 1/3 the energy of the fundamental) only odd-numbered partials 1 / p (3rd partial has 1/3 the energy of the fundamental) 17 (max patch) Spectrogram (snapshot) 18 Identifying Different Instruments 19 audio sonogram of 2 bird trills 20 Spear (software) audio surgery? isolate partials within a complex sound 21 the physics of noise Random additions to a signal By fltering white noise, we get different types (colors) of noise, parallels to visible light White Noise White noise is a random noise that contains an equal amount of energy in all frequency bands. -

WO 2016/054079 Al 7 April 2016 (07.04.2016) P O P C T
(12) INTERNATIONAL APPLICATION PUBLISHED UNDER THE PATENT COOPERATION TREATY (PCT) (19) World Intellectual Property Organization International Bureau (10) International Publication Number (43) International Publication Date WO 2016/054079 Al 7 April 2016 (07.04.2016) P O P C T (51) International Patent Classification: (74) Agents: WADEKAR, Suhrid et al; Goodwin Procter G01N 21/359 (2014.01) A61B 5/1495 (2006.01) LLP, Exchange Place, Boston, MA 02109 (US). A61B 5/145 (2006.01) A61B 5/024 (2006.01) (81) Designated States (unless otherwise indicated, for every A61B 5/00 (2006.01) A61B 5/1455 (2006.01) kind of national protection available): AE, AG, AL, AM, (21) International Application Number: AO, AT, AU, AZ, BA, BB, BG, BH, BN, BR, BW, BY, PCT/US20 15/052999 BZ, CA, CH, CL, CN, CO, CR, CU, CZ, DE, DK, DM, DO, DZ, EC, EE, EG, ES, FI, GB, GD, GE, GH, GM, GT, (22) International Filing Date: HN, HR, HU, ID, IL, IN, IR, IS, JP, KE, KG, KN, KP, KR, 29 September 2015 (29.09.201 5) KZ, LA, LC, LK, LR, LS, LU, LY, MA, MD, ME, MG, (25) Filing Language: English MK, MN, MW, MX, MY, MZ, NA, NG, NI, NO, NZ, OM, PA, PE, PG, PH, PL, PT, QA, RO, RS, RU, RW, SA, SC, (26) Publication Language: English SD, SE, SG, SK, SL, SM, ST, SV, SY, TH, TJ, TM, TN, (30) Priority Data: TR, TT, TZ, UA, UG, US, UZ, VC, VN, ZA, ZM, ZW. 62/057,103 29 September 2014 (29.09.2014) US (84) Designated States (unless otherwise indicated, for every 62/057,496 30 September 2014 (30.09.2014) US kind of regional protection available): ARIPO (BW, GH, (71) Applicant: ZYOMED CORP. -
![Arxiv:2102.00117V1 [Math.PR]](https://docslib.b-cdn.net/cover/2210/arxiv-2102-00117v1-math-pr-1462210.webp)
Arxiv:2102.00117V1 [Math.PR]
STOCHASTIC SOLUTIONS OF GENERALIZED TIME-FRACTIONAL EVOLUTION EQUATIONS CHRISTIAN BENDER AND YANA A. BUTKO Abstract. We consider a general class of integro-differential evolution equa- tions which includes the governing equation of the generalized grey Brownian motion and the time- and space-fractional heat equation. We present a general relation between the parameters of the equation and the distribution of the underlying stochastic processes, as well as discuss different classes of processes providing stochastic solutions of these equations. For a subclass of evolution equations, containing Saigo-Maeda generalized time-fractional operators, we determine the parameters of the corresponding processes explicitly. Moreover, we explain how self-similar stochastic solutions with stationary increments can be obtained via linear fractional L´evy motion for suitable pseudo-differential operators in space. Keywords: time-fractional evolution equations, fractional calculus, randomly scaled L´evy processes, linear fractional L´evy motion, generalized grey Brown- ian motion, inverse subordinators, Saigo-Maeda generalized fractional opera- tors, Appell functions, three parameter Mittag-Leffler function, Feynman-Kac formulae 1. Introduction Einstein’s explanation of Brownian motion has provided the cornerstone which underlies deep connections between stochastic processes and evolution equations. 2 d/2 x Namely, the function p (x) := (2πt)− exp | | , which is the probabil- t − 2t ity density function (PDF) of a (d-dimensional) Brownian motion (Bt)t>0, is also ∂u 1 the fundamental solution of the heat equation ∂t (t, x) = 2 ∆u(t, x) with the Laplace operator ∆. In other words, the heat equation is the governing equation for Brownian motion. And the solution of the Cauchy problem for the heat equation with initial data u0 has the stochastic representation u(t, x)= E[u0(x + Bt)]. -

Low-Cost Distributed Acoustic Sensor Network for Real-Time Urban Sound Monitoring
electronics Article Low-Cost Distributed Acoustic Sensor Network for Real-Time Urban Sound Monitoring Ester Vidaña-Vila 1,*,† , Joan Navarro 2,† , Cristina Borda-Fortuny 2,† and Dan Stowell 3 and Rosa Ma Alsina-Pagès 1,† 1 GTM—Grup de Recerca en Tecnologies Mèdia, 08022 Barcelona, Spain; [email protected] 2 GRITS—Grup de Recerca en Internet Techologies and Storage, 08022 Barcelona, Spain; [email protected] (J.N.); [email protected] (C.B.-F.) 3 Machine Listening Lab, Centre for Digital Music, Queen Mary University of London, London E1 4NS, UK * Correspondence: [email protected]; Tel.: +34-932902400 † La Salle, Universitat Ramon Llull. c/Quatre Camins, 30, 08022 Barcelona, Spain. Received: 2 November 2020; Accepted: 7 December 2020; Published: 11 December 2020 Abstract: Continuous exposure to urban noise has been found to be one of the major threats to citizens’ health. In this regard, several organizations are devoting huge efforts to designing new in-field systems to identify the acoustic sources of these threats to protect those citizens at risk. Typically, these prototype systems are composed of expensive components that limit their large-scale deployment and thus reduce the scope of their measurements. This paper aims to present a highly scalable low-cost distributed infrastructure that features a ubiquitous acoustic sensor network to monitor urban sounds. It takes advantage of (1) low-cost microphones deployed in a redundant topology to improve their individual performance when identifying the sound source, (2) a deep-learning algorithm for sound recognition, (3) a distributed data-processing middleware to reach consensus on the sound identification, and (4) a custom planar antenna with an almost isotropic radiation pattern for the proper node communication. -
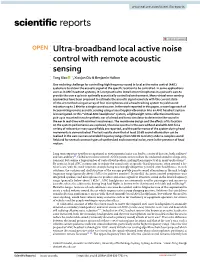
Ultra-Broadband Local Active Noise Control with Remote Acoustic Sensing
www.nature.com/scientificreports OPEN Ultra‑broadband local active noise control with remote acoustic sensing Tong Xiao *, Xiaojun Qiu & Benjamin Halkon One enduring challenge for controlling high frequency sound in local active noise control (ANC) systems is to obtain the acoustic signal at the specifc location to be controlled. In some applications such as in ANC headrest systems, it is not practical to install error microphones in a person’s ears to provide the user a quiet or optimally acoustically controlled environment. Many virtual error sensing approaches have been proposed to estimate the acoustic signal remotely with the current state‑ of‑the‑art method using an array of four microphones and a head tracking system to yield sound reduction up to 1 kHz for a single sound source. In the work reported in this paper, a novel approach of incorporating remote acoustic sensing using a laser Doppler vibrometer into an ANC headrest system is investigated. In this “virtual ANC headphone” system, a lightweight retro‑refective membrane pick‑up is mounted in each synthetic ear of a head and torso simulator to determine the sound in the ear in real‑time with minimal invasiveness. The membrane design and the efects of its location on the system performance are explored, the noise spectra in the ears without and with ANC for a variety of relevant primary sound felds are reported, and the performance of the system during head movements is demonstrated. The test results show that at least 10 dB sound attenuation can be realised in the ears over an extended frequency range (from 500 Hz to 6 kHz) under a complex sound feld and for several common types of synthesised environmental noise, even in the presence of head motion.