Information Theory
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Grey Noise, Dubai Unit 24, Alserkal Avenue Street 8, Al Quoz 1, Dubai
Grey Noise, Dubai Stéphanie Saadé b. 1983, Lebanon Lives and works between Beirut, Paris and Amsterdam Education and Residencies 2018 - 2019 3 Package Deal, 1 year “Interhistoricity” (Scholarship received from the AmsterdamFonds Voor Kunst and the Bureau Broedplaatsen), In partnership with Museum Van Loon Oude Kerk, Castrum Peregrini and Reinwardt Academy, Amsterdam, Netherlands 2018 Studio Cur’art and Bema, Mexico City and Guadalajara 2017 – 2018 Maison Salvan, Labège, France Villa Empain, Fondation Boghossian, Brussels, Belgium 2015 – 2016 Cité Internationale des Arts, Paris, France (Recipient of the French Institute residency program scholarship) 2014 – 2015 Jan Van Eyck Academie, Maastricht, The Netherlands 2013 PROGR, Bern, Switzerland 2010 - 2012 China Academy of Arts, Hangzhou, China (State-funded Scholarship for post- graduate program) 2005 – 2010 École Nationale Supérieure des Beaux-Arts, Paris, France (Diplôme National Supérieur d’Arts Plastiques) Awards 2018 Recipient of the 2018 NADA MIAMI Artadia Art Award Selected Solo Exhibitions 2020 (Upcoming) AKINCI Gallery, Amsterdam, Netherlands 2019 The Travels of Here and Now, Museum Van Loon, Amsterdam, Netherlands with the support of Amsterdams fonds voor de Kunst The Encounter of the First and Last Particles of Dust, Grey Noise, Dubai L’espace De 70 Jours, La Scep, Marseille, France Unit 24, Alserkal Avenue Street 8, Al Quoz 1, Dubai, UAE / T +971 4 3790764 F +971 4 3790769 / [email protected] / www.greynoise.org Grey Noise, Dubai 2018 Solo Presentation at Nada Miami with Counter -

ACCESSORIES and BATTERIES MTX Professional Series Portable Two-Way Radios MTX Series
ACCESSORIES AND BATTERIES MTX Professional Series Portable Two-Way Radios MTX Series Motorola Original® Accessories let you make the most of your MTX Professional Series radio’s capabilities. You made a sound business decision when you chose your Motorola MTX Professional Series Two-Way radio. When you choose performance-matched Motorola Original® accessories, you’re making another good call. That’s because every Motorola Original® accessory is designed, built and rigorously tested to the same quality standards as Motorola radios. So you can be sure that each will be ready to do its job, time after time — helping to increase your productivity. After all, if you take a chance on a mismatched battery, a flimsy headset, or an ill-fitting carry case, your radio may not perform at the moment you have to use it. We’re pleased to bring you this collection of proven Motorola Original® accessories for your important business communication needs. You’ll find remote speaker microphones for more convenient control. Discreet earpiece systems to help ensure privacy and aid surveillance. Carry cases for ease when on the move. Headsets for hands-free operation. Premium batteries to extend work time, and more. They’re all ready to help you work smarter, harder and with greater confidence. Motorola MTX Professional Series radios keep you connected with a wider calling range, faster channel access, greater privacy and higher user and talkgroup capacity. MTX PROFESSIONAL SERIES PORTABLE RADIOS TM Intelligent radio so advanced, it practically thinks for you. MTX Series Portable MTX850 Two-Way Radios are the smart choice for your business - delivering everything you need for great business communication. -

Sampling Signals on Graphs from Theory to Applications
1 Sampling Signals on Graphs From Theory to Applications Yuichi Tanaka, Yonina C. Eldar, Antonio Ortega, and Gene Cheung Abstract The study of sampling signals on graphs, with the goal of building an analog of sampling for standard signals in the time and spatial domains, has attracted considerable attention recently. Beyond adding to the growing theory on graph signal processing (GSP), sampling on graphs has various promising applications. In this article, we review current progress on sampling over graphs focusing on theory and potential applications. Although most methodologies used in graph signal sampling are designed to parallel those used in sampling for standard signals, sampling theory for graph signals significantly differs from the theory of Shannon–Nyquist and shift-invariant sampling. This is due in part to the fact that the definitions of several important properties, such as shift invariance and bandlimitedness, are different in GSP systems. Throughout this review, we discuss similarities and differences between standard and graph signal sampling and highlight open problems and challenges. I. INTRODUCTION Sampling is one of the fundamental tenets of digital signal processing (see [1] and references therein). As such, it has been studied extensively for decades and continues to draw considerable research efforts. Standard sampling theory relies on concepts of frequency domain analysis, shift invariant (SI) signals, and bandlimitedness [1]. Sampling of time and spatial domain signals in shift-invariant spaces is one of the most important building blocks of digital signal processing systems. However, in the big data era, the signals we need to process often have other types of connections and structure, such as network signals described by graphs. -

Lecture 24 1 Kolmogorov Complexity
6.441 Spring 2006 24-1 6.441 Transmission of Information May 18, 2006 Lecture 24 Lecturer: Madhu Sudan Scribe: Chung Chan 1 Kolmogorov complexity Shannon’s notion of compressibility is closely tied to a probability distribution. However, the probability distribution of the source is often unknown to the encoder. Sometimes, we interested in compressibility of specific sequence. e.g. How compressible is the Bible? We have the Lempel-Ziv universal compression algorithm that can compress any string without knowledge of the underlying probability except the assumption that the strings comes from a stochastic source. But is it the best compression possible for each deterministic bit string? This notion of compressibility/complexity of a deterministic bit string has been studied by Solomonoff in 1964, Kolmogorov in 1966, Chaitin in 1967 and Levin. Consider the following n-sequence 0100011011000001010011100101110111 ··· Although it may appear random, it is the enumeration of all binary strings. A natural way to compress it is to represent it by the procedure that generates it: enumerate all strings in binary, and stop at the n-th bit. The compression achieved in bits is |compression length| ≤ 2 log n + O(1) More generally, with the universal Turing machine, we can encode data to a computer program that generates it. The length of the smallest program that produces the bit string x is called the Kolmogorov complexity of x. Definition 1 (Kolmogorov complexity) For every language L, the Kolmogorov complexity of the bit string x with respect to L is KL (x) = min l(p) p:L(p)=x where p is a program represented as a bit string, L(p) is the output of the program with respect to the language L, and l(p) is the length of the program, or more precisely, the point at which the execution halts. -

Portable Radio: Headsets XTS 3000, XTS 3500, XTS 5000, XTS 1500, XTS 2500, MT 1500, and PR1500
portable radio: headsets XTS 3000, XTS 3500, XTS 5000, XTS 1500, XTS 2500, MT 1500, and PR1500 Noise-Cancelling Headsets with Boom Microphone Ideal for two-way communication in extremely noisy environments. Dual-Muff, tactical headsets RMN4052A include 2 microphones on outside of earcups which reproduce ambient sound back into headset. Harmful sounds are suppressed to safe levels and low sounds are amplified up to 5 times original level, but never more than 82dB. Has on/off volume control on earcups. Easily replaceable ear seals are filled with a liquid and foam combination to provide excellent sealing and comfort. 3-foot coiled cord assembly included. Adapter Cable RKN4095A required. RMN4052A Tactical Headband Style Headset. Grey, Noise reduction = 24dB. RMN4053A Tactical Hardhat Mount Headset. Grey, Noise reduction = 22dB. RKN4095A Adapter Cable with In-Line Push-to-Talk For use with RMN4051B/RMN4052A/RMN4053A. REPLACEMENTEARSEALS RLN4923B Replacement Earseals for RMN4051B/RMN4052A/RMN4053A Includes 2 snap-in earseals. Hardhat Mount Headset With Noise-Cancelling Boom Microphone RMN4051B Ideal for two-way communication in high-noise environments, this headset mounts easily to hard- hats with slots, or can be worn alone. Easily replaceable ear seals are filled with a liquid and foam combination to provide excellent sealing and comfort. 3-foot coiled cord assembly included. Noise reduction of 22dB. Separate In-line PTT Adapter Cable RKN4095A required. Hardhat not included. RMN4051B* Two-way, Hardhat Mount Headset with Noise-Cancelling Boom Microphone. Black. RKN4095A Adapter cable with In-Line PTT. For use with RMN4051B/RMN4052A/RMN4053A. Medium Weight Headsets Medium weight headsets offer high-clarity sound, with the additional hearing protection necessary to provide consistent, clear, two-way radio communication in harsh, noisy environments or situations. -

Lecture19.Pptx
Outline Foundations of Computer Graphics (Fall 2012) §. Basic ideas of sampling, reconstruction, aliasing CS 184, Lectures 19: Sampling and Reconstruction §. Signal processing and Fourier analysis §. http://inst.eecs.berkeley.edu /~cs184 Implementation of digital filters §. Section 14.10 of FvDFH (you really should read) §. Post-raytracing lectures more advanced topics §. No programming assignment §. But can be tested (at high level) in final Acknowledgements: Thomas Funkhouser and Pat Hanrahan Some slides courtesy Tom Funkhouser Sampling and Reconstruction Sampling and Reconstruction §. An image is a 2D array of samples §. Discrete samples from real-world continuous signal (Spatial) Aliasing (Spatial) Aliasing §. Jaggies probably biggest aliasing problem 1 Sampling and Aliasing Image Processing pipeline §. Artifacts due to undersampling or poor reconstruction §. Formally, high frequencies masquerading as low §. E.g. high frequency line as low freq jaggies Outline Motivation §. Basic ideas of sampling, reconstruction, aliasing §. Formal analysis of sampling and reconstruction §. Signal processing and Fourier analysis §. Important theory (signal-processing) for graphics §. Implementation of digital filters §. Also relevant in rendering, modeling, animation §. Section 14.10 of FvDFH Ideas Sampling Theory Analysis in the frequency (not spatial) domain §. Signal (function of time generally, here of space) §. Sum of sine waves, with possibly different offsets (phase) §. Each wave different frequency, amplitude §. Continuous: defined at all points; discrete: on a grid §. High frequency: rapid variation; Low Freq: slow variation §. Images are converting continuous to discrete. Do this sampling as best as possible. §. Signal processing theory tells us how best to do this §. Based on concept of frequency domain Fourier analysis 2 Fourier Transform Fourier Transform §. Tool for converting from spatial to frequency domain §. -
LPM Woofer Sample Report
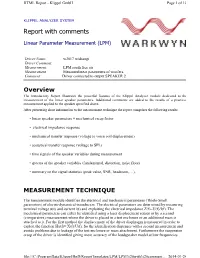
HTML Report - Klippel GmbH Page 1 of 10 KLIPPEL ANALYZER SYSTEM Report with comments Linear Parameter Measurement (LPM) Driver Name: w2017 midrange Driver Comment: Measurement: LPM south free air Measurement Measureslinear parameters of woofers. Comment : Driver connected to output SPEAKER 2. Overview The Introductory Report illustrates the powerful features of the Klippel Analyzer module dedicated to the measurement of the linear speaker parameters. Additional comments are added to the results of a practical measurement applied to the speaker specified above. After presenting short information to the measurement technique the report comprises the following results • linear speaker parameters + mechanical creep factor • electrical impedance response • mechanical transfer response (voltage to voice coil displacement) • acoustical transfer response (voltage to SPL) • time signals of the speaker variables during measurement • spectra of the speaker variables (fundamental, distortion, noise floor) • summary on the signal statistics (peak value, SNR, headroom,…). MEASUREMENT TECHNIQUE The measurement module identifies the electrical and mechanical parameters (Thiele-Small parameters) of electro-dynamical transducers. The electrical parameters are determined by measuring terminal voltage u(t) and current i(t) and exploiting the electrical impedance Z(f)=U(f)/I(f). The mechanical parameters can either be identified using a laser displacement sensor or by a second (comparative) measurement where the driver is placed in a test enclosure or an additional mass is attached to it. For the first method the displacement of the driver diaphragm is measured in order to exploit the function Hx(f)= X(f)/U(f). So the identification dispenses with a second measurement and avoids problems due to leakage of the test enclosure or mass attachment. -

And Bandlimiting IMAHA, November 14, 2009, 11:00–11:40
Time- and bandlimiting IMAHA, November 14, 2009, 11:00{11:40 Joe Lakey (w Scott Izu and Jeff Hogan)1 November 16, 2009 Joe Lakey (w Scott Izu and Jeff Hogan) Time- and bandlimiting Joe Lakey (w Scott Izu and Jeff Hogan) Time- and bandlimiting Joe Lakey (w Scott Izu and Jeff Hogan) Time- and bandlimiting Joe Lakey (w Scott Izu and Jeff Hogan) Time- and bandlimiting sampling theory and history Time- and bandlimiting, history, definitions and basic properties connecting sampling and time- and bandlimiting The multiband case Outline Joe Lakey (w Scott Izu and Jeff Hogan) Time- and bandlimiting Time- and bandlimiting, history, definitions and basic properties connecting sampling and time- and bandlimiting The multiband case Outline sampling theory and history Joe Lakey (w Scott Izu and Jeff Hogan) Time- and bandlimiting connecting sampling and time- and bandlimiting The multiband case Outline sampling theory and history Time- and bandlimiting, history, definitions and basic properties Joe Lakey (w Scott Izu and Jeff Hogan) Time- and bandlimiting The multiband case Outline sampling theory and history Time- and bandlimiting, history, definitions and basic properties connecting sampling and time- and bandlimiting Joe Lakey (w Scott Izu and Jeff Hogan) Time- and bandlimiting Outline sampling theory and history Time- and bandlimiting, history, definitions and basic properties connecting sampling and time- and bandlimiting The multiband case Joe Lakey (w Scott Izu and Jeff Hogan) Time- and bandlimiting R −2πitξ Fourier transform: bf (ξ) = f (t) e dt R _ Bandlimiting: -

An Introduction to Opensound Navigator™
WHITEPAPER 2016 An introduction to OpenSound Navigator™ HIGHLIGHTS OpenSound Navigator™ is a new speech-enhancement algorithm that preserves speech and reduces noise in complex environments. It replaces and exceeds the role of conventional directionality and noise reduction algorithms. Key technical advances in OpenSound Navigator: • Holistic system that handles all acoustical environments from the quietest to the noisiest and adapts its response to the sound preference of the user – no modes or mode switch. • Integrated directional and noise reduction action – rebalance the sound scene, preserve speech in all directions, and selectively reduce noise. • Two-microphone noise estimate for a “spatially-informed” estimate of the environmental noise, enabling fast and accurate noise reduction. The speed and accuracy of the algorithm enables selective noise reduction without isolating the talker of interest, opening up new possibilities for many audiological benefits. Nicolas Le Goff,Ph.D., Senior Research Audiologist, Oticon A/S Jesper Jensen, Ph.D., Senior Scientist, Oticon A/S; Professor, Aalborg University Michael Syskind Pedersen, Ph.D., Lead Developer, Oticon A/S Susanna Løve Callaway, Au.D., Clinical Research Audiologist, Oticon A/S PAGE 2 WHITEPAPER – 2016 – OPENSOUND NAVIGATOR The daily challenge of communication To make sense of a complex acoustical mixture, the brain in noise organizes the sound entering the ears into different Sounds occur around us virtually all the time and they auditory “objects” that can then be focused on or put in start and stop unpredictably. We constantly monitor the background. The formation of these auditory objects these changes and choose to interact with some of the happens by assembling sound elements that have similar sounds, for instance, when engaging in a conversation features (e.g., Bregman, 1990). -
Shannon Entropy and Kolmogorov Complexity
Information and Computation: Shannon Entropy and Kolmogorov Complexity Satyadev Nandakumar Department of Computer Science. IIT Kanpur October 19, 2016 This measures the average uncertainty of X in terms of the number of bits. Shannon Entropy Definition Let X be a random variable taking finitely many values, and P be its probability distribution. The Shannon Entropy of X is X 1 H(X ) = p(i) log : 2 p(i) i2X Shannon Entropy Definition Let X be a random variable taking finitely many values, and P be its probability distribution. The Shannon Entropy of X is X 1 H(X ) = p(i) log : 2 p(i) i2X This measures the average uncertainty of X in terms of the number of bits. The Triad Figure: Claude Shannon Figure: A. N. Kolmogorov Figure: Alan Turing Just Electrical Engineering \Shannon's contribution to pure mathematics was denied immediate recognition. I can recall now that even at the International Mathematical Congress, Amsterdam, 1954, my American colleagues in probability seemed rather doubtful about my allegedly exaggerated interest in Shannon's work, as they believed it consisted more of techniques than of mathematics itself. However, Shannon did not provide rigorous mathematical justification of the complicated cases and left it all to his followers. Still his mathematical intuition is amazingly correct." A. N. Kolmogorov, as quoted in [Shi89]. Kolmogorov and Entropy Kolmogorov's later work was fundamentally influenced by Shannon's. 1 Foundations: Kolmogorov Complexity - using the theory of algorithms to give a combinatorial interpretation of Shannon Entropy. 2 Analogy: Kolmogorov-Sinai Entropy, the only finitely-observable isomorphism-invariant property of dynamical systems. -
Lecture 16 Bandlimiting and Nyquist Criterion
ELG3175 Introduction to Communication Systems Lecture 16 Bandlimiting and Nyquist Criterion Bandlimiting and ISI • Real systems are usually bandlimited. • When a signal is bandlimited in the frequency domain, it is usually smeared in the time domain. This smearing results in intersymbol interference (ISI). • The only way to avoid ISI is to satisfy the 1st Nyquist criterion. • For an impulse response this means at sampling instants having only one nonzero sample. Lecture 12 Band-limited Channels and Intersymbol Interference • Rectangular pulses are suitable for infinite-bandwidth channels (practically – wideband). • Practical channels are band-limited -> pulses spread in time and are smeared into adjacent slots. This is intersymbol interference (ISI). Input binary waveform Individual pulse response Received waveform Eye Diagram • Convenient way to observe the effect of ISI and channel noise on an oscilloscope. Eye Diagram • Oscilloscope presentations of a signal with multiple sweeps (triggered by a clock signal!), each is slightly larger than symbol interval. • Quality of a received signal may be estimated. • Normal operating conditions (no ISI, no noise) -> eye is open. • Large ISI or noise -> eye is closed. • Timing error allowed – width of the eye, called eye opening (preferred sampling time – at the largest vertical eye opening). • Sensitivity to timing error -> slope of the open eye evaluated at the zero crossing point. • Noise margin -> the height of the eye opening. Pulse shapes and bandwidth • For PAM: L L sPAM (t) = ∑ai p(t − iTs ) = p(t)*∑aiδ (t − iTs ) i=0 i=0 L Let ∑aiδ (t − iTs ) = y(t) i=0 Then SPAM ( f ) = P( f )Y( f ) BPAM = Bp. -

Vicinity of Canadian Airports
THE I]NIVERSITY OF MANITOBA LAND_USE PLANNING IN THE VICINITY OF CANADIAN AIRPORTS by DONALD H. DRACKLEY A THESTS SUBMITTED TO THE DEPARTMENT OF CITY PLANNING rN PARTIAI FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF MASTER OF CITY PLANNING DEPARTMENT OF CITY PLANNING I^IINNIPEG, MANITOBA OCTOBER, l9BO LAND_UST PLANNING iN THE VICINITY OF CANADIAN AIRPORTS BY DONALD HERBERT DRACKLEY A the sis sLrblllitted to the IracLrlty of'Gradrrate Studies ol the Utliversity of Manitoba in partial lLrllillnlent of the requirerrients of tlle degree of I'IASTTR OF CiTY PLANNTNG ovl9B0 Pennission has been granted to the LIBIìAIìY OF TI-IE UNIVER- SITY OIr MANITOBA to le nd or sell co¡rics of this thesis, to tlte NATIONAL LIBRARY OF CANADA to microlilrn this tltesis and to lend or sell copics of'the t'ilm, and UNIVERSITY MICROIìILMS to pLrblish an abstract ot'this thesis. The aLrthor reserves otlier prrblication rights, allcl lrcithcr the thcsis nor cxtellsive extracts f¡-onl it ntay be printer.l or other- wise reprodLrced withotrt the aLrthor's written ¡rerntission. -ii- PRtrFACE The ímportance of aír transportation on a national and ínternational scale ís an indíspurable fact, but at the same time it must-,be admitted that the impact of airport activities has raised substantial questions concerning their desírabilíty in urban or rural areas. The problems of noise, property devaluatíon and land use control, for example, have only recently been considered. As a result, this thesÍs will address ítself to land-use planning in the vicinity of airports. It Ís hoped that by review- ing problems and analysing present responses, alternatíve land-use planníng technÍques may be suggested which recognize the symbioËic relationship of aírports and surroundíng areas The disturbances caused by airport operations adversely affect those r"rho live or r¡rork ín the írnmedíate vicinity.