Marine Propellers and Propulsion to Jane and Caroline Marine Propellers and Propulsion
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Propeller Operation and Malfunctions Basic Familiarization for Flight Crews
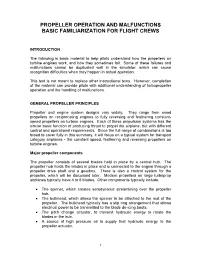
PROPELLER OPERATION AND MALFUNCTIONS BASIC FAMILIARIZATION FOR FLIGHT CREWS INTRODUCTION The following is basic material to help pilots understand how the propellers on turbine engines work, and how they sometimes fail. Some of these failures and malfunctions cannot be duplicated well in the simulator, which can cause recognition difficulties when they happen in actual operation. This text is not meant to replace other instructional texts. However, completion of the material can provide pilots with additional understanding of turbopropeller operation and the handling of malfunctions. GENERAL PROPELLER PRINCIPLES Propeller and engine system designs vary widely. They range from wood propellers on reciprocating engines to fully reversing and feathering constant- speed propellers on turbine engines. Each of these propulsion systems has the similar basic function of producing thrust to propel the airplane, but with different control and operational requirements. Since the full range of combinations is too broad to cover fully in this summary, it will focus on a typical system for transport category airplanes - the constant speed, feathering and reversing propellers on turbine engines. Major propeller components The propeller consists of several blades held in place by a central hub. The propeller hub holds the blades in place and is connected to the engine through a propeller drive shaft and a gearbox. There is also a control system for the propeller, which will be discussed later. Modern propellers on large turboprop airplanes typically have 4 to 6 blades. Other components typically include: The spinner, which creates aerodynamic streamlining over the propeller hub. The bulkhead, which allows the spinner to be attached to the rest of the propeller. -

2 Review of Composite Propeller Developments
'HIHQFH5HVHDUFKDQG 5HFKHUFKHHWGpYHORSSHPHQW 'HYHORSPHQW&DQDGD SRXUODGpIHQVH&DQDGD Review of Composite Propeller Developments and Strategy for Modeling Composite Propellers using PVAST Tamunoiyala S. Koko Khaled O. Shahin Unyime O. Akpan Merv E. Norwood Prepared By: Martec Limited 1888 Brunswick Street, Suite 400 Halifax, NS B3J 3J8 Team Leader, Reliability & Risk Engineering Contractor's Document Number: TR-11-XX Contract Project Manager: Tamunoiyala S. Koko, 902-425-5101 Ext 243 PWGSC Contract Number: W7707-088100 Task 10 &6$/D\WRQ*LOUR\ The scientific or technical validity of this Contract Report is entirely the responsibility of the Contractor and the contents do not necessarily have the approval or endorsement of Defence R&D Canada. Defence R&D Canada – Atlantic &RQWUDFW5HSRUW '5'&$WODQWLF&5 6HSWHPEHU Review of Composite Propeller Developments and Strategy for Modeling Composite Propellers using PVAST Tamunoiyala S. Koko Khaled O. Shahin Unyime O. Akpan Merv E. Norwood Prepared By: Martec Limited 1888 Brunswick Street, Suite 400 Halifax, NS B3J 3J8 Team Leader, Reliability & Risk Engineering Contractor's Document Number: TR-11-XX Contract Project Manager: Tamunoiyala S. Koko, 902-425-5101 Ext 243 PWGSC Contract Number: W7707-088100 Task 10 &6$/D\WRQ*LOUR\ The scientific or technical validity of this Contract Report is entirely the responsibility of the Contractor and the contents do not necessarily have the approval or endorsement of Defence R&D Canada. Defence R&D Canada – Atlantic Contract Report DRDC Atlantic CR 2011-156 6HSWHPEHU © Her Majesty the Queen in Right of Canada, as represented by the Minister of National Defence, 201 © Sa Majesté la Reine (en droit du Canada), telle que représentée par le ministre de la Défense nationale, 201 Abstract ……. -

Marine Propellers
2.016 Hydrodynamics Reading #10 2.016 Hydrodynamics Prof. A.H. Techet Marine Propellers Today, conventional marine propellers remain the standard propulsion mechanism for surface ships and underwater vehicles. Modifications of basic propeller geometries into water jet propulsors and alternate style thrusters on underwater vehicles has not significantly changed how we determine and analyze propeller performance. We still need propellers to generate adequate thrust to propel a vessel at some design speed with some care taken in ensuring some “reasonable” propulsive efficiency. Considerations are made to match the engine’s power and shaft speed, as well as the size of the vessel and the ship’s operating speed, with an appropriately designed propeller. Given that the above conditions are interdependent (ship speed depends on ship size, power required depends on desired speed, etc.) we must at least know a priori our desired operating speed for a given vessel. Following this we should understand the basic relationship between ship power, shaft torque and fuel consumption. Power: Power is simply force times velocity, where 1 HP (horsepower, english units) is equal to 0.7457 kW (kilowatt, metric) and 1kW = 1000 Newtons*meters/second. P = F*V (1.1) Effective Horsepower (EHP) is the power required to overcome a vessel’s total resistance at a given speed, not including the power required to turn the propeller or operate any machinery (this is close to the power required to tow a vessel). version 3.0 updated 8/30/2005 -1- ©2005 A. Techet 2.016 Hydrodynamics Reading #10 Indicated Horsepower (IHP) is the power required to drive a ship at a given speed, including the power required to turn the propeller and to overcome any additional friction inherent in the system. -
Naval Ensigns & Jacks
INTERNATIONAL TREASURES ™ A NATIONAL TREASURE Naval Ensigns & Jacks ZFC3577 USSR, Cruiser Aurora, unique, Order of the Oct. Revolution & Military Order of the Red Banner, Holiday Ensign, 1992. This variant of the Soviet Naval Ensign is from the Cruiser Aurora, a ship with a long and distinguished career. The Aurora is an armored cruiser currently preserved and serving as a school and museum in Saint Petersburg, Russia. ZFC0228 Lead Royal Navy ship, D-Day Operation Overlord, ZFC0514 France Ensign, FFL Aconite WWII, Sank 2 German Invasion of Normandy, 1944. This battle ensign was on the leading U-Boats on same day, 1943. An iconic French ensign which embod Royal Navy ship of the invasion that assaulted the Normandy ies the brief, yet brave, struggle of French forces against fascist beaches on June 6, 1944. Commander Anthony Kimmins secured Germany in the opening years of WWII. This flag comes from the the flag for Calvin Bullock for his return visit to New York. FNFL corvette ‘Aconite’ and was part of the Bullock Collection. ZFC0232 Royal Canadian Navy White Ensign, HMCS Wetaskiwin, ZFC0503 Lead Royal Navy ship Eastern Tack Force, Operation “Battle of the Atlantic,” 1943. This White Ensign, according to Husky, Invasion of Sicily, 1943. Due to wartime security constraints, Calvin Bullock’s documentation was “From His Majesty’s Canadian the name of the vessel that wore this ensign remains unknown. The Corvette WETASKIWIN, which for long had been flown in both the documentation states only that it flew on the task force leading the Pacific and Atlantic Oceans.” allied attacks on Sicily. -

A Simplified Model for a Small Propeller with Different Airfoils Along the Blade
A simplified model for a small propeller with different airfoils along the blade Kamal A. R. Ismail1) and *Célia V. A. G. Rosolen2) 1), 2) State University of Campinas, Faculty of Mechanical Engineering, Department of Energy, Rua Mendeleiev, 200, Cidade Universitária “Zeferino Vaz”, 13083-860 - Barão Geraldo - Campinas - SP, Brasil 1) [email protected] ABSTRACT The flow through the rotor of a propeller is complex due to the rotor wake interaction. Varieties of methods with different simplifications were used to represent the flow field and its interaction with the rotor. The impact of these simplifications on the precision of the predicted results and computation time were evaluated. These methods include momentum theory, blade element theory, lifting line theory, finite volume methods, panel methods, boundary element methods and CFD analysis. The objective of the present work is to propose a robust and simple method to calculate the aerodynamic characteristics of the propeller with relatively good precision. Both the momentum theory and blade element theory were used in home built FORTRAN code and the predicted results were validated against results from the Panel method and available experimental measurements showing acceptable agreement. Furthermore, the numerical code was used to investigate the effect of incorporating three different blade sections on the power and thrust coefficients. 1. INTRODUCTION Small and medium size rotors are used in many recent applications as in propulsion of small airplanes, unmanned aerial vehicles (UAV), autonomous underwater vehicle (AUV), and small wind turbines and ducted propellers. Understanding rotor action and interaction with wake flow field are important aspects to better formulate and predict the performance of propeller rotors and wind turbines. -
Want Something Better Than the OEM Propeller?
Quick Reference Guide Product Info • Prop Selection • Crossover Info • Part List Want Something Better Than The OEM Propeller? Run FASTER • Pull HARDER • Handle BETTER Get A free Diameter & Pitch Recommendation Today Visit us on the web at: https://turningpointpropellers.com/PROPWIZARD 6-300+hp • 3 AND 4 BLADE • ALUMINUM AND STAINLESS STEEL OUTBOARD AND STERNDRIVE BOAT PROPELLERS AVAILABLE FOR: Coleman® Evinrude® Honda® Johnson® Mariner® Mercury® MerCruiser® Nissan® OMC® Parsun® Suzuki® Tohatsu® Volvo Penta® Yamaha® Turning Point Propellers Industry Leading Manufacturer of Aluminum and Stainless Steel Pleasure Boat Propellers NO FASTER PROP ON THE WATER CONTENTS About Turning Point Propellers 1-6 Propeller Selection 7-14 OEM & Aftermarket Brand Crossover 15 ® Solas Crossover to Turning Point 16-24 Turning Point Propellers Features and Benefits (Con’t) ® Quicksilver Crossover to Turning Point 25-26 ® 11762 Marco Beach Drive STE. 2 Michigan Wheel Crossover to Turning Point 27-30 Jacksonville, FL 32224 Premium ULTRACOAT Powder Coat (Hustler Prop Series) Turning Point Propellers Part List 30-31 United States • Exclusive to Turning Point, the Ultracoat powder coat rivals a fine automotive finish, and 24 Hour Slurry Test: 600% More Wear! Competitor’s Process Office Hours: 9am-5pm ET M-F is more durable than paint. Phone: +1 904-900-7739 • Utilizing a state-of-the-art five step process, Ultracoat gives the propeller a shiny, uniform Who Is Turning Point Propellers Press (1) for Product Installation & Tech Support • One of the worlds largest propeller manufacturers. We own and operate our own aluminum Press (2) for Purchase Orders & Accounting appearance that enhances any boat’s good looks. -
Low and High Speed Propellers for General Aviation - Performance Potential and Recent Wind Tunnel Test Results
NASA Technical Memorandum 8 1745 Low and High Speed Propellers for General Aviation - Performance Potential and Recent Wind Tunnel Test Results Robert J. Jeracki and Glenn A. Mitchell Lewis Research Center Cleveland, Ohio i I Prepared for the ! National Business Aircraft Meeting sponsored by the Society of Automotive Engineers Wichita, Kansas, April 7-10, 1981 LOW AND HIGH SPEED PROPELLERS FOR GENERAL AVIATION - PERFORMANCE POTENTIAL AND RECENT WIND TUNNEL TEST RESULTS by Robert J. Jeracki and Glenn A. Mitchell National Aeronautics and Space Administration Lewis Research Center Cleveland, Ohio 441 35 THE VAST MAJORlTY OF GENERAL-AVIATION AIRCRAFT manufactured in the United States are propel- ler powered. Most of these aircraft use pro- peller designs based on technology that has not changed significantlv since the 1940's and early 1950's. This older technology has been adequate; however, with the current world en- ergy shortage and the possibility of more stringent noise regulations, improved technol- ogy is needed. Studies conducted by NASA and industry indicate that there are a number of improvements in the technology of general- aviation (G.A.) propellers that could lead to significant energy savings. New concepts like blade sweep, proplets, and composite materi- als, along with advanced analysis techniques have the potential for improving the perform- ance and lowering the noise of future propel- ler-powererd aircraft that cruise at lower speeds. Current propeller-powered general- aviation aircraft are limited by propeller compressibility losses and limited power out- put of current engines to maximum cruise speeds below Mach 0.6. The technology being developed as part of NASA's Advanced Turboprop Project offers the potential of extending this limit to at least Mach 0.8. -

Remni Feb 17/18
February 18, 2018 remembrance ni Ulster sailors killed at Anzio in Belfast- built Penelope ! On February 18, 1944 three Able Seamen and a Petty Officer from Northern Ireland died in HMS Penelope which was torpedoed near Anzio. They were Thomas Gould from Belfast, Kenneth Hewitt from Londondery, William Hunter from Ballyclare and Samuel Taylor from Dundrod. 418 members of the ship’s company of 650, including the captain DG Belben. A Lance Bombardier from Londonderry in the Royal Artillery was killed at Anzio the previous day. Page !1 February 18, 2018 The Belfast-built ship had been attacked so often she was nicknames HMS Pepperpot. One of the survivors, Jack Clark, a Royal marine musician, was a gunnery operator in the transmitting station on Penelope. He recalled his experience to the BBC. “Having taken part in actions in the North Africa campaign, Sicily, Italy and Aegean we were engaged in the bombardment of enemy positions relating to the beachhead at Anzio. Having bombarded for approximately two weeks we were becoming short of fuel and ammunition. On the 17th February 1944 we left during the late evening and returned to Naples to replenish supplies of the aforementioned. Captain Belben had completed our tour of duty and was expected to give us a well-earned 24-hour rest period, the custom when conditions permitted. “As we anchored in the bay of Naples at 22:00 captain Belben received a signal ordering him to prepare for sea immediately and return to Anzio to take the place of HMS Dido, which had been in collision with a landing craft in Naples bay. -

Hydromatic Propeller
HYDROMATIC PROPELLER International Historic Engineering Landmark Hamilton Standard The American Society of A Division of United Technologies Mechanical Engineers Windsor Locks, Connecticut November 8, 1990 Historical Significance The text of this International Landmark Designation: The Hamilton Standard Hydromatic propeller represented INTERNATIONAL HISTORIC MECHANICAL a major advance in propeller design and laid the groundwork ENGINEERING LANDMARK for further advancements in propulsion over the next 50 years. The Hydromatic was designed to accommodate HAMILTON STANDARD larger blades for increased thrust, and provide a faster rate HYDROMATIC PROPELLER of pitch change and a wider range of pitch control. This WINDSOR LOCKS, CONNECTICUT propeller utilized high-pressure oil, applied to both sides of LATE 1930s the actuating piston, for pitch control as well as feathering — the act of stopping propeller rotation on a non-functioning The variable-pitch aircraft propeller allows the adjustment engine to reduce drag and vibration — allowing multiengined in flight of blade pitch, making optimal use of the engine’s aircraft to safely continue flight on remaining engine(s). power under varying flight conditions. On multi-engined The Hydromatic entered production in the late 1930s, just aircraft it also permits feathering the propeller--stopping its in time to meet the requirements of the high-performance rotation--of a nonfunctioning engine to reduce drag and military and transport aircraft of World War II. The vibration. propeller’s performance, durability and reliability made a The Hydromatic propeller was designed for larger blades, major contribution to the successful efforts of the U.S. and faster rate of pitch change, and wider range of pitch control Allied air forces. -

Wärtsilä Rudder Solutions
Courtesy of Finnlines Oy, photographed by Hannu Laakso. Energopac incorporated in model tests, photographed by HSVA. CFD capabilities within Wärtsilä are state-of-the-art. In 2009, two Energopac systems were delivered to a newbuilding project, and in early 2010 the first Energopac retrofit was successfully installed. Another 12 Energopac systems are currently on order for delivery in 2010 and 2011. OPTIMIZING ENERGY EFFICIENCY The Wärtsilä Propeller-Rudder System, Energopac is an optimized propulsion and Wärtsilä is continuously looking to improve Energopac has been designed to include the manoeuvring solution for coastal and seagoing the energy efficiency of its propulsion following benefits: vessels. Its key objective is to reduce a vessel’s solutions. In so doing, we aim to reduce fuel • improved energy efficiency and reduced fuel fuel consumption and CO2 emissions through consumption, lower the operational costs of consumption, thanks to integrated propeller integrating the propeller and rudder design. seagoing vessels, and, of course, cut back on and rudder design Energopac is tailored for each and every vessel emissions. We design our solutions to meet • excellent manoeuvrability to meet the customer’s specific requirements, specific customer requirements, utilizing our • lower vibration levels and higher comfort and can thus be optimized for energy efficiency, extensive marine industry experience and onboard without compromising manoeuvrability or state-of-the-art, modern techniques, such as • reduced levels of emissions comfort. CFD (Computational Fluid Dynamics). ENERGOPAC INTEGRATED PROPULSION AND DESIGNED FOR PERFECTION MANOEUVRING PERFORMANCE Energopac was developed through co-operation Our high efficiency rudder technology dates back to the 1990s when Wärtsilä started making energy-saving A vessel’s power efficiency level is dependent between Wärtsilä’s propulsion specialists, and rudders. -

A More Comprehensive Database for Propeller Performance Validations at Low Reynolds Numbers
A MORE COMPREHENSIVE DATABASE FOR PROPELLER PERFORMANCE VALIDATIONS AT LOW REYNOLDS NUMBERS A Dissertation by Armin Ghoddoussi Master of Science, Wichita State University, 2011 Bachelor of Science, Sojo University, 1998 Submitted to the Department of Aerospace Engineering and the faculty of the Graduate School of Wichita State University in partial fulfillment of the requirements for the degree of Doctor of Philosophy May 2016 © Copyright 2016 by Armin Ghoddoussi All Rights Reserved A MORE COMPREHENSIVE DATABASE FOR PROPELLER PERFORMANCE VALIDATIONS AT LOW REYNOLDS NUMBERS The following faculty members have examined the final copy of this dissertation for form and content, and recommend that it be accepted in partial fulfillment of the requirement for the degree of Doctor of Philosophy with a major in Aerospace Engineering. L. Scott Miller, Committee Chair Klaus Hoffmann, Committee Member Kamran Rokhsaz, Committee Member Charles Yang, Committee Member Hamid Lankarani, Committee Member Accepted for the College of Engineering Royce Bowden, Dean Accepted for the Graduate School Dennis Livesay, Dean iii ACKNOWLEDGEMENTS I would like to express my deepest gratitude to my advisor and mentor, Professor L. Scott Miller for his guidance throughout this project. Also, I am sincerely grateful for the opportunity and help that the department of Aerospace Engineering, NIAR W. H. Beech Wind Tunnel, NIAR Research Machine Shop, NIAR CAD/CAM Lab, Cessna Manufacturing Lab and their generous staff provided. Above all, none of this would be possible without the love and care of my parents, brother and friends. This is dedicated to my family members, Akhtar, Ali and Elcid Ghoddoussi. Thank you for your constant support and patience. -
A Review of Propeller Modelling Techniques Based on Euler Methods
Series 01 Aerodynamics 05 A Review of Propeller Modelling Techniques Based on Euler Methods G.J.D. Zondervan Delft University Press A Review of Propeller Modelling Techniques 8ased on Euler Methods 8ibliotheek TU Delft 111111111111 C 3021866 2392 345 o Series 01: Aerodynamics 05 \ • ":. 1 . A Review of Propeller Modelling Techniques Based on Euler Methods G.J.D. Zondervan Delft University Press / 1 998 Published and distributed by: Delft University Press Mekelweg 4 2628 CD Delft The Netherlands Telephone +31 (0)152783254 Fax +31 (0)152781661 e-mail: [email protected] by order of: Faculty of Aerospace Engineering Delft University of Technology Kluyverweg 1 P.O. Box 5058 2600 GB Delft The Netherlands Telephone +31 (0)152781455 Fax +31 (0)152781822 e-mail: [email protected] website: http://www.lr.tudelft.nl! Cover: Aerospace Design Studio, 66.5 x 45.5 cm, by: Fer Hakkaart, Dullenbakkersteeg 3, 2312 HP Leiden, The Netherlands Tel. + 31 (0)71 512 67 25 90-407-1568-8 Copyright © 1998 by Faculty of Aerospace Engineering All rights reserved . No part of the material protected by this copyright notice may be reproduced or utilized in any form or by any means, electronic or mechanical, including photocopying, recording or by any information storage and retrieval system, without written permission from the publisher: Delft University Press. Printed in The Netherlands Contents 1 Introduction 4 1.1 Future propulsion concepts 4 1.2 Introduction in the propeller slipstream interference problem 6 2 Propeller modelling 7 2.1 Propeller aerodynarnics