The Failed Project of the “Heavy” MAS
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Coastal Warfare in World War II
Coastal Warfare in World War II Christopher P. Carlson Cold Wars 2003 Admiralty Trilogy Seminar Introduction Coastal Warfare in WWII ♦ What is Coastal Warfare? ♦ Lioral/Coastal Environment ♦ Background ♦ Mighty Midgets - “Small Craft” ♦ Roles and Missions ♦ Tactics Overview ♦ National Development ♦ Post-WWII ♦ Coastal Warfare and CaS ♦ Some Good Books What is Coastal Warfare? Coastal Warfare in WWII ♦ “Lioral” or Coastal waters ♦ Shallow water, often sheltered waters • Sometimes too shallow for larger naval vessels ♦ Not seagoing ships • Can’t operate in Sea State 4-5, even then it’s unpleasant ♦ More than just PTs and other high-speed craft • Motor launches for minesweeping, ASW, rescue (e.g. British MLs) • Small minesweepers (e.g. German R-boats) • Barges for transporting cargo (e.g. Japanese Daihatsus) • Landing craft ♦ Common factor is small size • Limited endurance • Light armament • Low damage capacity !! Littoral/Coastal Environment Coastal Warfare in WWII ♦ Difficult environment due to the close proximity of land ♦ Detection Issue - Heavy clu1er ♦ Classification Issue - Many false contacts ♦ Reduced operation space - Restricted maneuverability ♦ All combine to reduce a ship’s reaction time Coastal waters Background Coastal Warfare in WWII ♦ WWI - These are distinct from the “Torpedo Boat” • Seagoing vessel intended for fleet action ♦ Who built coastal combatants? • Britain: Built a dozen Coastal Motor Boats (CMBs) ■ 40 ft long, single rearward launched torpedo & a few MGs ■ Several dozen motor launches, 76ft long, 3 pdr, general-purpose -

Why China Has Not Caught Up
Why China Has Not Caught Up Yet Why China Has Not Andrea Gilli and Caught Up Yet Mauro Gilli Military-Technological Superiority and the Limits of Imitation, Reverse Engineering, and Cyber Espionage Can adversaries of the United States easily imitate its most advanced weapon systems and thus erode its military-technological superiority? Do reverse engineering, industrial espi- onage, and, in particular, cyber espionage facilitate and accelerate this process? China’s decades-long economic boom, military modernization program, mas- sive reliance on cyber espionage, and assertive foreign policy have made these questions increasingly salient. Yet, almost everything known about this topic draws from the past. As we explain in this article, the conclusions that the ex- isting literature has reached by studying prior eras have no applicability to the current day. Scholarship in international relations theory generally assumes that ris- ing states beneªt from the “advantage of backwardness,” as described by Andrea Gilli is a senior researcher at the NATO (North Atlantic Treaty Organization) Defense College in Rome, Italy. Mauro Gilli is a senior researcher at the Center for Security Studies at the Swiss Federal Insti- tute of Technology in Zurich, Switzerland. The authors are listed in alphabetical order to reºect their equal contributions to this article. The views expressed in the article are those of the authors and do not represent the views of NATO, the NATO Defense College, or any other institution with which the authors are or have been -

A Historical Assessment of Amphibious Operations from 1941 to the Present
CRM D0006297.A2/ Final July 2002 Charting the Pathway to OMFTS: A Historical Assessment of Amphibious Operations From 1941 to the Present Carter A. Malkasian 4825 Mark Center Drive • Alexandria, Virginia 22311-1850 Approved for distribution: July 2002 c.. Expedit'onaryyystems & Support Team Integrated Systems and Operations Division This document represents the best opinion of CNA at the time of issue. It does not necessarily represent the opinion of the Department of the Navy. Approved for Public Release; Distribution Unlimited. Specific authority: N0014-00-D-0700. For copies of this document call: CNA Document Control and Distribution Section at 703-824-2123. Copyright 0 2002 The CNA Corporation Contents Summary . 1 Introduction . 5 Methodology . 6 The U.S. Marine Corps’ new concept for forcible entry . 9 What is the purpose of amphibious warfare? . 15 Amphibious warfare and the strategic level of war . 15 Amphibious warfare and the operational level of war . 17 Historical changes in amphibious warfare . 19 Amphibious warfare in World War II . 19 The strategic environment . 19 Operational doctrine development and refinement . 21 World War II assault and area denial tactics. 26 Amphibious warfare during the Cold War . 28 Changes to the strategic context . 29 New operational approaches to amphibious warfare . 33 Cold war assault and area denial tactics . 35 Amphibious warfare, 1983–2002 . 42 Changes in the strategic, operational, and tactical context of warfare. 42 Post-cold war amphibious tactics . 44 Conclusion . 46 Key factors in the success of OMFTS. 49 Operational pause . 49 The causes of operational pause . 49 i Overcoming enemy resistance and the supply buildup. -

PT-305 Fact Sheet
PT-305 Fact Sheet Higgins “78” Specifications: • Length 78 feet • Beam 20 feet 1 inch • Draft 5 feet 3 inches • Weight 43-56 tons, depending on weapons • Engines 3 Packard V-12s • Speed 40 knots • Crew 2 officers, 11 men • Higgins designed boat (Mr. Sprauge) • More maneuverable than ELCO • Engines located mid-ship Weapons and Other Equipment: • .50-caliber twin machine guns, effective as an anti-aircraft and anti-personnel weapon • Oerlikon 20mm guns for use against both air- and surface craft • 4 Mark 13 torpedoes, mounted in roll-off launching racks, each weighing over a ton including a 600- pound warhead • Mark 6 anti-submarine depth charge • small 60mm mortar able to launch illuminating rounds, lay smoke screens, and bombard shore targets • stern-mounted canister of compressed gas for smoke screens • radar, especially useful at night (In the Med, radar-equipped American PT boats would often be paired up with British MTBs (motor torpedo boats), which had no radar, to hunt for German flak lighters at night. PT-305 restoration stats: • Volunteers: 202 all-time; 67 currently • Volunteer man-hours: 105,000 • Volunteer labor value: about $2 million • Monetary donations: about $400,000 • Donations from more than 100 companies • In-kind donations: nearly $3 million worth of supplies, materials, and parts including: • Approximately 300 gallons of paint • 120 gallons of Dolphinte bedding compound • 480 yard of #10 Cotton Duck • 10,000 board foot of mahogany • 3,000 board foot of cypress • 75 sheets marine plywood • 39,000 copper rivets • 3 miles of caulked seam (double that for masking tape) • 36,000 silicon bronze screws • 12,459 feet of cabling and wiring PT Boat Losses During the war: 69 of the 531 PT boats lost in service (source: PT Boats, Inc.) • Accident, friendly fire, sea conditions: 22 • Destroyed to prevent capture: 21 • Aircraft: 5 • Ship: 5 • Shore Battery: 5 • Mine: 4 • Rammed: 2 • Kamikaze: 2 • Other: 3 Postwar: • Burned off a beach at Samar, Philippines: 118 • Many were given to allies, including China, South Korea, and the Soviet Union. -

Countersea Operations
COUNTERSEA OPERATIONS Air Force Doctrine Document 2-1.4 15 September 2005 This document complements related discussion found in Joint Publication 3-30, Command and Control for Joint Air Operations. BY ORDER OF THE AIR FORCE DOCTRINE DOCUMENT 2-1.4 SECRETARY OF THE AIR FORCE 15 SEPTEMBER 2005 SUMMARY OF REVISIONS This document is substantially revised. This revision’s overarching changes are new chapter headings and sections, terminology progression to “air and space” from “aerospace,” expanded discussion on planning and employment factors, operational considerations when conducting countersea operations, and effects-based methodology and the emphasis on operations vice capabilities or platforms. Specific changes with this revision are the additions of the naval warfighter’s perspective to enhance understanding the environment, doctrine, and operations of the maritime forces on page 3; comparison between Air Force and Navy/Marine Corp terminology, on page 7, included to ensure Air Force forces are aware of the difference in terms or semantics; a terminology matrix added to simplify that awareness on page 9; amphibious operations organization, command and control, and planning are also included throughout the document. Supersedes: AFDD 2-1.4, 4 June 1999 OPR: HQ AFDC/DS (Lt Col Richard Hughey) Certified by: AFDC/DR (Lt Col Eric Schnitzer) Pages: 66 Distribution: F Approved by: Bentley B. Rayburn, Major General, USAF Commander, Headquarters Air Force Doctrine Center FOREWORD Countersea Operations are about the use of Air Force capabilities in the maritime environment to accomplish the joint force commander’s objectives. This doctrine supports DOD Directive 5100.1 requirements for surface sea surveillance, anti-air warfare, anti-surface ship warfare, and anti-submarine warfare. -

Naval Operations with the SLC (SLC: Siluro a Lenta Corsa, ‘Slowmoving Torpedo”)
The First FrByo Sven Erik gJørgensenm - The Danish Societye ofn Diving History 2 Naval operations with the SLC (SLC: Siluro a Lenta Corsa, ‘slowmoving torpedo”) (continued and concluded from issue #7) In the years prior to World War water. As soon as the submarine was in II, the Italian fleet had devel- position, and the frogmen were out, the oped a new underwater weap- containers were opened and the SLC drawn out. The frogmen then tested all on, the SLC, a slow torpedo the functions of the SLC before setting which was manned by two out for the target. The first part of the trip divers. Submerged, and thereby took place on the surface, when only the heads of the frogmen were above the unseen, the frogmen on the surface. The frogmen had full face masks SLC could get close in to the on but breathed through a valve in the enemy ships and mine them. mouthpiece out to the air in order not to The frogmen trained in attacking deplete the oxygen stores. The harbours were gener- their own ships, and after many ally barred by submarine excercises developed a pro- nets which the frog- cedure for approach and men had to pass placing mines under the ships. either under or over. They could also cut their The submarine, which transported the way through SLC in pressurised containers on the using wire-cut- deck, sailed as close as possible to the ters. Free from target. One could then choose either the nets and into to release the frogmen while the sub- the harbour, the marine was lying on the seabed or, if it frogmen picked were possible without being discovered, out the chosen to let the submarine float to the surface target by its sil- with only its tower appearing above the houette because 85 X-RAY MAG : 8:8 :200 20055 EDITORIAL FEATURES TRAVEL NEWS EQUIPMENT BOOKS SCIENCE & ECOLOGY EDUCATION PROFILES PORTFOLIO CLASSIFIED The SLC sailing at the surface. -

Patrol Torpedo Boats During World War II
University of New Orleans ScholarWorks@UNO University of New Orleans Theses and Dissertations Dissertations and Theses Fall 12-15-2012 Firing Point: Patrol Torpedo Boats during World War II Joshua J. Schick University of New Orleans, [email protected] Follow this and additional works at: https://scholarworks.uno.edu/td Part of the Military History Commons, and the United States History Commons Recommended Citation Schick, Joshua J., "Firing Point: Patrol Torpedo Boats during World War II" (2012). University of New Orleans Theses and Dissertations. 1602. https://scholarworks.uno.edu/td/1602 This Thesis is protected by copyright and/or related rights. It has been brought to you by ScholarWorks@UNO with permission from the rights-holder(s). You are free to use this Thesis in any way that is permitted by the copyright and related rights legislation that applies to your use. For other uses you need to obtain permission from the rights- holder(s) directly, unless additional rights are indicated by a Creative Commons license in the record and/or on the work itself. This Thesis has been accepted for inclusion in University of New Orleans Theses and Dissertations by an authorized administrator of ScholarWorks@UNO. For more information, please contact [email protected]. Firing Point: Patrol Torpedo Boats during World War II A Thesis Submitted to the Graduate Faculty of the University of New Orleans in partial fulfillment of the requirements for the degree of Master of Arts in History By Joshua James Schick B.A. Louisiana State University, 2010 December, 2012 Acknowledgement I would like to thank my thesis committee comprised of Dr. -
In This Issue . . . from the Director's Chair
Newsletter of the Battleship Texas Foundation Winter 2016 From The Director’s Chair In this issue . I am probably the last person to get the opportunity to say The Director’s Chair Pg1 Happy New Year to you but a least I got mine in. We are looking forward to a wonderful year with a lot of things on the drawing FTV Report Pg2 board. I wanted to share just a few of our plans for 2016 with you. Hard Hat Tours Pg3 Corporate Supporters The big news is that we expect to return to our efforts to complete the structural repairs that began on The Texas in Curator’s Corner Pg4 2014. The best news is that thanks to all of the efforts that were put into our lobbying efforts, we were able to secure enough Overnight Program Pg5 funds from The Texas Legislature, to not only start back to work Supporters Pg6 on the structural repairs but enough funds to complete them. We are anticipating that work should begin again in the late In Honor Of Pg7 spring to early summer. Once we begin you can expect Neil Tho- mas, from TPWD, to return to The Dreadnought with his up- Membership Forms Pg8 dates regarding the progress of the work. We are really excited about this one. The next item is that we will be installing 28 tons of new HVAC on the Texas. This was made possible by our friends at CAPS who donated much of the equipment and its installation. Post WWII photo ? The remaining funds that were needed were donated by The Herzstein Foundation and The Brown Foundation. -

AH193611.Pdf
****************** +Y++44++Y+YYY++++Jf +* +* 28 NOVEMBER 1936 ++ .yy. BUREAU OF NAVIGATION *+ ++ ++ BULLETIN +* ++ * *+ ++ NUMBER 242 ++ ++ ++ ++ ++ ++ PUBLISHED FOR THE PURPOSE OF DISSEMINATING GENERAL INFORMATION OF PROBABLE INTEREST TO ++ THE SERVICE. 4y. sr+ ++ ++ ****************** ;y+++++++c*r*++++++ The Secretary of the Navy recently addressed letter7 OS commendation to the following I e .. Lieut. (jg) L. COM., U,S,N., U,S,t, Lexington, far his unselfish action and far the spirit that pi-ompted it, in rescuingL1r. D. 0. Corley, a cmescial pilot nho had crashed and was pinaed in his plane with hear? partially submerged in mater, in the vicinity of Sail Diego, Calif., on 2 July 1935, Lieut. (jg) Corn, after landing his plane near the crash, ewm to the plane, yartia1J.y removed Mr, Corley from the cockpit and held him clear of the water until the arrival of the crash boat from the Naval Air Station, about ten mbutes after the crash. James V, Monahan, Searran lc, U.S.N., Receiving Ship, New York, N. Y., for his prompt and courageous action in rescuing A. Yesland, Firemzn Zc, UeS,N., from dronning at the Destroyer Base, San Diogo, Calif., on 3 July 1936. Yesland was engineer of the U.S.S. Dahlgren motor launch when it caught fire just after being fuelled. Monahan, without regard for his om personal safety and danger of explosion of ths gas tank, jmpsd overboard from the U.S.S. Rigel motor launch and rescued Yesland, who vas unable to swim and vas burned, from the burning launch and brought hin to safety. BAonahan has he'en recommended to the Secretary of the Treasury for the amrd of a Gold Life-saving Medal in recognition of his act. -

Attu the Forgotten Battle
ATTU THE FORGOTTEN BATTLE John Haile Cloe soldiers, Attu Island, May 14, 1943. (U.S. Navy, NARA 2, RG80G-345-77087) U.S. As the nation’s principal conservation agency, the Department of the Interior has responsibility for most of our nationally owned public lands and natural and cultural resources. This includes fostering the wisest use of our land and water resources, our national parks and historical places, and providing for enjoyment of life through outdoorprotecting recreation. our fish and wildlife, preserving the environmental and cultural values of The Cultural Resource Programs of the National Park Service have responsibilities that include stewardship of historic buildings, museum collections, archeological sites, cultural landscapes, oral and written histories, and ethnographic resources. Our mission is to identify, evaluate and preserve the cultural resources of the park areas and to bring an understanding of these resources to the public. Congress has mandated that we preserve these resources because they are important components of our national and personal identity. Study prepared for and published by the United State Department of the Interior through National Park Servicethe Government Printing Office. Aleutian World War II National Historic Area Alaska Affiliated Areas Any opinions, findings, and conclusions or recommendations expressed in this material are those of the author and contributors and do not necessarily reflect the views of the Department of the Interior. Attu, the Forgotten Battle ISBN-10:0-9965837-3-4 ISBN-13:978-0-9965837-3-2 2017 ATTU THE FORGOTTEN BATTLE John Haile Cloe Bringing down the wounded, Attu Island, May 14, 1943. (UAA, Archives & Special Collections, Lyman and Betsy Woodman Collection) TABLE OF CONTENTS LIST OF PHOTOGRAPHS .........................................................................................................iv LIST OF MAPS ......................................................................................................................... -

Against Other Italians. Borghese Was Recognized As the Leader of The
against other Italians. Borghese was recognized as the Crocetta del Montello: Incidents of torture with whips leader of the corps. and gasoline and the summary executions of partisans. The Decima Flottiglia Mas, now purely a land based Other Xa MAS units earned a good combat reputation military unit, raised a force of 50,000 men, which fighting on the frontline against the Allies at Anzio eventually conducted anti-partisan warfare including Bridgehead and on the Gothic Line (Linea Gotica)9. In the systematic torture and execution of partisans, in particular last months of the warXa MASunits were also dispatched members of the Communist units.The main themes of to the North East Italian border and employed against the reconstituted Xa MAS ideology became honor in Marshall Tito’s Yugoslavian partisans. The history of the defending Italy fiom the betrayal of the Armistice with the Xa MAS from 1943 to 1945 remains tainted. Although Allies; deep anti-Semitism in the wake of stronger Nazi the valor of this unit was recognized by both the Allies influence, and a call to defend the territorial integrity of and the Gernaans, its actions against partisans notably its Italy against the Allies. This was quite ironic, since the participation in the massacres of civilians do not permit it Third Reich had already annexed northeastern Italian to be remembered as a completely honorable unit. territories and integrated them directly into the Reich On April 26, 1945 in what is now the Piazza della as the Pre-Alpine Operations Zone and Adriatic Coastal Repubblica in Milan, Borghese finally ordered the Operational Zone. -
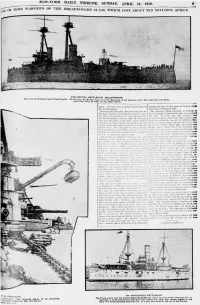
Texas, Which the Un.Ted States $4.:02.000 and Which Was One of the Victorious Fv-T at ,R
KKW-YORK DAHT TRim*NE. SUNDAY, APRIL MJ 1910. a >Ill]sK OK THE \y m DERADNOU6HT CLASS, WHICH COST ABOUT TEN MILLIONS APIECE. THE BRITISH BATTLESHIP BELLEROPHON. One cf G-«-»t Errtam". latest Dreadnought*. Of this type the British navy, •foos the launch. ng of the Colossus a few days ago, has nine afloat, more than twice as many as any other nation. yards factor. She will carry as many 12-inch guns as marinos are also on the ways of German the 1>r> adnoughts. f«,r Emperor William's fleet. making Including the Infl< the Invincible, the In- The progress: which Germany Is In xibl.\ pointed <li.ii.italU' and tbc ImtTfathraMr. armored <ruis- naval strength Is illustrated When it is ers only a f«w htindre.ls of tons smaller than out that osje year ago that country had only the Dreadnoughts, carrying eight 12-inch runs no Dreadnoughts afloat and could muster battleships capable fighting effeo •a« h an.l travelling at 26 knots. Great Britain fourtei n of ag.iitist expects to be Ik- possessor two years from MM tively al modern rani as twenty-flvsj of sixteen Dreadnoughts and cruisers of the In- flying the United States Hag and forty-nine >..':. type. The shipyards of Great Britain Britis! ships. When all of th<' warships now Germany will have demonstrated that they fan turn cut bat- under construction are completed ti;. ;»laoe tWshijs ;t a h:!i rate of speed, for Ihe Col ssua wresl from United States t!.*- second addition of the battle- \u25a0 i\u25a0 .-n ,i.- ways only bine months.