Development of an Interplanetary Orbital Propagator
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Low Thrust Manoeuvres to Perform Large Changes of RAAN Or Inclination in LEO
Facoltà di Ingegneria Corso di Laurea Magistrale in Ingegneria Aerospaziale Master Thesis Low Thrust Manoeuvres To Perform Large Changes of RAAN or Inclination in LEO Academic Tutor: Prof. Lorenzo CASALINO Candidate: Filippo GRISOT July 2018 “It is possible for ordinary people to choose to be extraordinary” E. Musk ii Filippo Grisot – Master Thesis iii Filippo Grisot – Master Thesis Acknowledgments I would like to address my sincere acknowledgments to my professor Lorenzo Casalino, for your huge help in these moths, for your willingness, for your professionalism and for your kindness. It was very stimulating, as well as fun, working with you. I would like to thank all my course-mates, for the time spent together inside and outside the “Poli”, for the help in passing the exams, for the fun and the desperation we shared throughout these years. I would like to especially express my gratitude to Emanuele, Gianluca, Giulia, Lorenzo and Fabio who, more than everyone, had to bear with me. I would like to also thank all my extra-Poli friends, especially Alberto, for your support and the long talks throughout these years, Zach, for being so close although the great distance between us, Bea’s family, for all the Sundays and summers spent together, and my soccer team Belfiga FC, for being the crazy lovable people you are. A huge acknowledgment needs to be address to my family: to my grandfather Luciano, for being a great friend; to my grandmother Bianca, for teaching me what “fighting” means; to my grandparents Beppe and Etta, for protecting me -
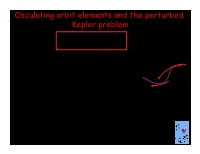
Osculating Orbit Elements and the Perturbed Kepler Problem
Osculating orbit elements and the perturbed Kepler problem Gmr a = 3 + f(r, v,t) Same − r x & v Define: r := rn ,r:= p/(1 + e cos f) ,p= a(1 e2) − osculating orbit he sin f h v := n + λ ,h:= Gmp p r n := cos ⌦cos(! + f) cos ◆ sinp ⌦sin(! + f) e − X +⇥ sin⌦cos(! + f) + cos ◆ cos ⌦sin(! + f⇤) eY actual orbit +sin⇥ ◆ sin(! + f) eZ ⇤ λ := cos ⌦sin(! + f) cos ◆ sin⌦cos(! + f) e − − X new osculating + sin ⌦sin(! + f) + cos ◆ cos ⌦cos(! + f) e orbit ⇥ − ⇤ Y +sin⇥ ◆ cos(! + f) eZ ⇤ hˆ := n λ =sin◆ sin ⌦ e sin ◆ cos ⌦ e + cos ◆ e ⇥ X − Y Z e, a, ω, Ω, i, T may be functions of time Perturbed Kepler problem Gmr a = + f(r, v,t) − r3 dh h = r v = = r f ⇥ ) dt ⇥ v h dA A = ⇥ n = Gm = f h + v (r f) Gm − ) dt ⇥ ⇥ ⇥ Decompose: f = n + λ + hˆ R S W dh = r λ + r hˆ dt − W S dA Gm =2h n h + rr˙ λ rr˙ hˆ. dt S − R S − W Example: h˙ = r S d (h cos ◆)=h˙ e dt · Z d◆ h˙ cos ◆ h sin ◆ = r cos(! + f)sin◆ + r cos ◆ − dt − W S Perturbed Kepler problem “Lagrange planetary equations” dp p3 1 =2 , dt rGm 1+e cos f S de p 2 cos f + e(1 + cos2 f) = sin f + , dt Gm R 1+e cos f S r d◆ p cos(! + f) = , dt Gm 1+e cos f W r d⌦ p sin(! + f) sin ◆ = , dt Gm 1+e cos f W r d! 1 p 2+e cos f sin(! + f) = cos f + sin f e cot ◆ dt e Gm − R 1+e cos f S− 1+e cos f W r An alternative pericenter angle: $ := ! +⌦cos ◆ d$ 1 p 2+e cos f = cos f + sin f dt e Gm − R 1+e cos f S r Perturbed Kepler problem Comments: § these six 1st-order ODEs are exactly equivalent to the original three 2nd-order ODEs § if f = 0, the orbit elements are constants § if f << Gm/r2, use perturbation theory -

Astrodynamics
Politecnico di Torino SEEDS SpacE Exploration and Development Systems Astrodynamics II Edition 2006 - 07 - Ver. 2.0.1 Author: Guido Colasurdo Dipartimento di Energetica Teacher: Giulio Avanzini Dipartimento di Ingegneria Aeronautica e Spaziale e-mail: [email protected] Contents 1 Two–Body Orbital Mechanics 1 1.1 BirthofAstrodynamics: Kepler’sLaws. ......... 1 1.2 Newton’sLawsofMotion ............................ ... 2 1.3 Newton’s Law of Universal Gravitation . ......... 3 1.4 The n–BodyProblem ................................. 4 1.5 Equation of Motion in the Two-Body Problem . ....... 5 1.6 PotentialEnergy ................................. ... 6 1.7 ConstantsoftheMotion . .. .. .. .. .. .. .. .. .... 7 1.8 TrajectoryEquation .............................. .... 8 1.9 ConicSections ................................... 8 1.10 Relating Energy and Semi-major Axis . ........ 9 2 Two-Dimensional Analysis of Motion 11 2.1 ReferenceFrames................................. 11 2.2 Velocity and acceleration components . ......... 12 2.3 First-Order Scalar Equations of Motion . ......... 12 2.4 PerifocalReferenceFrame . ...... 13 2.5 FlightPathAngle ................................. 14 2.6 EllipticalOrbits................................ ..... 15 2.6.1 Geometry of an Elliptical Orbit . ..... 15 2.6.2 Period of an Elliptical Orbit . ..... 16 2.7 Time–of–Flight on the Elliptical Orbit . .......... 16 2.8 Extensiontohyperbolaandparabola. ........ 18 2.9 Circular and Escape Velocity, Hyperbolic Excess Speed . .............. 18 2.10 CosmicVelocities -

Seismic Wavefield Polarization
E3S Web of Conferences 12, 06001 (2016) DOI: 10.1051/e3sconf/20161206001 i-DUST 2016 Seismic wavefield polarization – Part I: Describing an elliptical polarized motion, a review of motivations and methods Claire Labonne1,2, a , Olivier Sèbe1, and Stéphane Gaffet2,3 1 CEA, DAM, DIF, 91297 Arpajon, France 2 Univ. Nice Sophia Antipolis, CNRS, IRD, Observatoire de la côte d’Azur, Géoazur UMR 7329, Valbonne, France 3 LSBB UMS 3538, Rustrel, France Abstract. The seismic wavefield can be approximated by a sum of elliptical polarized motions in 3D space, including the extreme linear and circular motions. Each elliptical motion need to be described: the characterization of the ellipse flattening, the orientation of the ellipse, circle or line in the 3D space, and the direction of rotation in case of non-purely linear motion. Numerous fields of study share the need of describing an elliptical motion. A review of advantages and drawbacks of each convention from electromagnetism, astrophysics and focal mechanism is done in order to thereafter define a set of parameters to fully characterize the seismic wavefield polarization. 1. Introduction The seismic wavefield is a combination of polarized waves in the three-dimensional (3D) space. The polarization is a characteristic of the wave related to the particle motion. The displacement of particles effected by elastic waves shows a particular polarization shape and a preferred direction of polarization depending on the source properties (location and characteristics) and the Earth structure. P-waves, for example, generate linear particle motion in the direction of propagation; the polarization is thus called linear. Rayleigh waves, on the other hand, generate, at the surface of the Earth, retrograde elliptical particle motion. -

Orbit Options for an Orion-Class Spacecraft Mission to a Near-Earth Object
Orbit Options for an Orion-Class Spacecraft Mission to a Near-Earth Object by Nathan C. Shupe B.A., Swarthmore College, 2005 A thesis submitted to the Faculty of the Graduate School of the University of Colorado in partial fulfillment of the requirements for the degree of Master of Science Department of Aerospace Engineering Sciences 2010 This thesis entitled: Orbit Options for an Orion-Class Spacecraft Mission to a Near-Earth Object written by Nathan C. Shupe has been approved for the Department of Aerospace Engineering Sciences Daniel Scheeres Prof. George Born Assoc. Prof. Hanspeter Schaub Date The final copy of this thesis has been examined by the signatories, and we find that both the content and the form meet acceptable presentation standards of scholarly work in the above mentioned discipline. iii Shupe, Nathan C. (M.S., Aerospace Engineering Sciences) Orbit Options for an Orion-Class Spacecraft Mission to a Near-Earth Object Thesis directed by Prof. Daniel Scheeres Based on the recommendations of the Augustine Commission, President Obama has pro- posed a vision for U.S. human spaceflight in the post-Shuttle era which includes a manned mission to a Near-Earth Object (NEO). A 2006-2007 study commissioned by the Constellation Program Advanced Projects Office investigated the feasibility of sending a crewed Orion spacecraft to a NEO using different combinations of elements from the latest launch system architecture at that time. The study found a number of suitable mission targets in the database of known NEOs, and pre- dicted that the number of candidate NEOs will continue to increase as more advanced observatories come online and execute more detailed surveys of the NEO population. -

Navigation of Space Vlbi Missions: Radioastron and Vsop
https://ntrs.nasa.gov/search.jsp?R=19940019453 2020-06-16T15:35:05+00:00Z View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by NASA Technical Reports Server NAVIGATION OF SPACE VLBI MISSIONS: RADIOASTRON AND VSOP Jordan Ellis Jet Propulsion Laboratory California Institute of Technology Pasadena, California Abstract Network (DSN) and co-observation and correlation by facilities of the National Radio Astronomy Observatory In the mid 199Os, Russian and Japanese space agencies (NRAO). Extensive international collaboration between will each place into highly elliptic earth orbit a radio the space agencies and between the multi-national VLBI telescope consisting of a a large antenna and radio as- community will be required to maximize the science tronomy receivers. Very Long Baseline Interferometry return. Schedules for an international network of VLBI (VLBI) techniques will be used to obtain high resolu- radio telescopes will be coordinated to ensure the ground tion images of radio sources observed by the space and antennas and spacecraft antenna are simultaneously ob- ground based antennas. Stringent navigation accuracy serving the same sources. An international network of requirements are imposed on the Space VLBI missions ground tracking stations will also support both space- by the need to transfer an ultra stable ground refer- craft. The tracking stations will record science data ence frequency standard to the spacecraft and by the downlinked in real time from the orbiting satellites, demands of the VLBI correlation process. Orbit deter- transfer a stable phase reference and collect two-way mination for the missions will be the joint responsibility doppler for navigation. -
Geodesy Methods Over Time
Geodesy methods over time GISC3325 - Lecture 4 Astronomic Latitude/Longitude • Given knowledge of the positions of an astronomic body e.g. Sun or Polaris and our time we can determine our location in terms of astronomic latitude and longitude. US Meridian Triangulation This map shows the first project undertaken by the founding Superintendent of the Survey of the Coast Ferdinand Hassler. Triangulation • Method of indirect measurement. • Angles measured at all nodes. • Scaled provided by one or more precisely measured base lines. • First attributed to Gemma Frisius in the 16th century in the Netherlands. Early surveying instruments Left is a Quadrant for angle measurements, below is how baseline lengths were measured. A non-spherical Earth • Willebrod Snell van Royen (Snellius) did the first triangulation project for the purpose of determining the radius of the earth from measurement of a meridian arc. • Snellius was also credited with the law of refraction and incidence in optics. • He also devised the solution of the resection problem. At point P observations are made to known points A, B and C. We solve for P. Jean Picard’s Meridian Arc • Measured meridian arc through Paris between Malvoisine and Amiens using triangulation network. • First to use a telescope with cross hairs as part of the quadrant. • Value obtained used by Newton to verify his law of gravitation. Ellipsoid Earth Model • On an expedition J.D. Cassini discovered that a one-second pendulum regulated at Paris needed to be shortened to regain a one-second oscillation. • Pendulum measurements are effected by gravity! Newton • Newton used measurements of Picard and Halley and the laws of gravitation to postulate a rotational ellipsoid as the equilibrium figure for a homogeneous, fluid, rotating Earth. -

Chapter 7 Mapping The
BASICS OF RADIO ASTRONOMY Chapter 7 Mapping the Sky Objectives: When you have completed this chapter, you will be able to describe the terrestrial coordinate system; define and describe the relationship among the terms com- monly used in the “horizon” coordinate system, the “equatorial” coordinate system, the “ecliptic” coordinate system, and the “galactic” coordinate system; and describe the difference between an azimuth-elevation antenna and hour angle-declination antenna. In order to explore the universe, coordinates must be developed to consistently identify the locations of the observer and of the objects being observed in the sky. Because space is observed from Earth, Earth’s coordinate system must be established before space can be mapped. Earth rotates on its axis daily and revolves around the sun annually. These two facts have greatly complicated the history of observing space. However, once known, accu- rate maps of Earth could be made using stars as reference points, since most of the stars’ angular movements in relationship to each other are not readily noticeable during a human lifetime. Although the stars do move with respect to each other, this movement is observable for only a few close stars, using instruments and techniques of great precision and sensitivity. Earth’s Coordinate System A great circle is an imaginary circle on the surface of a sphere whose center is at the center of the sphere. The equator is a great circle. Great circles that pass through both the north and south poles are called meridians, or lines of longitude. For any point on the surface of Earth a meridian can be defined. -

Orbit Determination Using Modern Filters/Smoothers and Continuous Thrust Modeling
Orbit Determination Using Modern Filters/Smoothers and Continuous Thrust Modeling by Zachary James Folcik B.S. Computer Science Michigan Technological University, 2000 SUBMITTED TO THE DEPARTMENT OF AERONAUTICS AND ASTRONAUTICS IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF MASTER OF SCIENCE IN AERONAUTICS AND ASTRONAUTICS AT THE MASSACHUSETTS INSTITUTE OF TECHNOLOGY JUNE 2008 © 2008 Massachusetts Institute of Technology. All rights reserved. Signature of Author:_______________________________________________________ Department of Aeronautics and Astronautics May 23, 2008 Certified by:_____________________________________________________________ Dr. Paul J. Cefola Lecturer, Department of Aeronautics and Astronautics Thesis Supervisor Certified by:_____________________________________________________________ Professor Jonathan P. How Professor, Department of Aeronautics and Astronautics Thesis Advisor Accepted by:_____________________________________________________________ Professor David L. Darmofal Associate Department Head Chair, Committee on Graduate Students 1 [This page intentionally left blank.] 2 Orbit Determination Using Modern Filters/Smoothers and Continuous Thrust Modeling by Zachary James Folcik Submitted to the Department of Aeronautics and Astronautics on May 23, 2008 in Partial Fulfillment of the Requirements for the Degree of Master of Science in Aeronautics and Astronautics ABSTRACT The development of electric propulsion technology for spacecraft has led to reduced costs and longer lifespans for certain -

Geodetic Position Computations
GEODETIC POSITION COMPUTATIONS E. J. KRAKIWSKY D. B. THOMSON February 1974 TECHNICALLECTURE NOTES REPORT NO.NO. 21739 PREFACE In order to make our extensive series of lecture notes more readily available, we have scanned the old master copies and produced electronic versions in Portable Document Format. The quality of the images varies depending on the quality of the originals. The images have not been converted to searchable text. GEODETIC POSITION COMPUTATIONS E.J. Krakiwsky D.B. Thomson Department of Geodesy and Geomatics Engineering University of New Brunswick P.O. Box 4400 Fredericton. N .B. Canada E3B5A3 February 197 4 Latest Reprinting December 1995 PREFACE The purpose of these notes is to give the theory and use of some methods of computing the geodetic positions of points on a reference ellipsoid and on the terrain. Justification for the first three sections o{ these lecture notes, which are concerned with the classical problem of "cCDputation of geodetic positions on the surface of an ellipsoid" is not easy to come by. It can onl.y be stated that the attempt has been to produce a self contained package , cont8.i.ning the complete development of same representative methods that exist in the literature. The last section is an introduction to three dimensional computation methods , and is offered as an alternative to the classical approach. Several problems, and their respective solutions, are presented. The approach t~en herein is to perform complete derivations, thus stqing awrq f'rcm the practice of giving a list of for11111lae to use in the solution of' a problem. -

Models for Earth and Maps
Earth Models and Maps James R. Clynch, Naval Postgraduate School, 2002 I. Earth Models Maps are just a model of the world, or a small part of it. This is true if the model is a globe of the entire world, a paper chart of a harbor or a digital database of streets in San Francisco. A model of the earth is needed to convert measurements made on the curved earth to maps or databases. Each model has advantages and disadvantages. Each is usually in error at some level of accuracy. Some of these error are due to the nature of the model, not the measurements used to make the model. Three are three common models of the earth, the spherical (or globe) model, the ellipsoidal model, and the real earth model. The spherical model is the form encountered in elementary discussions. It is quite good for some approximations. The world is approximately a sphere. The sphere is the shape that minimizes the potential energy of the gravitational attraction of all the little mass elements for each other. The direction of gravity is toward the center of the earth. This is how we define down. It is the direction that a string takes when a weight is at one end - that is a plumb bob. A spirit level will define the horizontal which is perpendicular to up-down. The ellipsoidal model is a better representation of the earth because the earth rotates. This generates other forces on the mass elements and distorts the shape. The minimum energy form is now an ellipse rotated about the polar axis. -

World Geodetic System 1984
World Geodetic System 1984 Responsible Organization: National Geospatial-Intelligence Agency Abbreviated Frame Name: WGS 84 Associated TRS: WGS 84 Coverage of Frame: Global Type of Frame: 3-Dimensional Last Version: WGS 84 (G1674) Reference Epoch: 2005.0 Brief Description: WGS 84 is an Earth-centered, Earth-fixed terrestrial reference system and geodetic datum. WGS 84 is based on a consistent set of constants and model parameters that describe the Earth's size, shape, and gravity and geomagnetic fields. WGS 84 is the standard U.S. Department of Defense definition of a global reference system for geospatial information and is the reference system for the Global Positioning System (GPS). It is compatible with the International Terrestrial Reference System (ITRS). Definition of Frame • Origin: Earth’s center of mass being defined for the whole Earth including oceans and atmosphere • Axes: o Z-Axis = The direction of the IERS Reference Pole (IRP). This direction corresponds to the direction of the BIH Conventional Terrestrial Pole (CTP) (epoch 1984.0) with an uncertainty of 0.005″ o X-Axis = Intersection of the IERS Reference Meridian (IRM) and the plane passing through the origin and normal to the Z-axis. The IRM is coincident with the BIH Zero Meridian (epoch 1984.0) with an uncertainty of 0.005″ o Y-Axis = Completes a right-handed, Earth-Centered Earth-Fixed (ECEF) orthogonal coordinate system • Scale: Its scale is that of the local Earth frame, in the meaning of a relativistic theory of gravitation. Aligns with ITRS • Orientation: Given by the Bureau International de l’Heure (BIH) orientation of 1984.0 • Time Evolution: Its time evolution in orientation will create no residual global rotation with regards to the crust Coordinate System: Cartesian Coordinates (X, Y, Z).