Satellite Orbits
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Low Thrust Manoeuvres to Perform Large Changes of RAAN Or Inclination in LEO
Facoltà di Ingegneria Corso di Laurea Magistrale in Ingegneria Aerospaziale Master Thesis Low Thrust Manoeuvres To Perform Large Changes of RAAN or Inclination in LEO Academic Tutor: Prof. Lorenzo CASALINO Candidate: Filippo GRISOT July 2018 “It is possible for ordinary people to choose to be extraordinary” E. Musk ii Filippo Grisot – Master Thesis iii Filippo Grisot – Master Thesis Acknowledgments I would like to address my sincere acknowledgments to my professor Lorenzo Casalino, for your huge help in these moths, for your willingness, for your professionalism and for your kindness. It was very stimulating, as well as fun, working with you. I would like to thank all my course-mates, for the time spent together inside and outside the “Poli”, for the help in passing the exams, for the fun and the desperation we shared throughout these years. I would like to especially express my gratitude to Emanuele, Gianluca, Giulia, Lorenzo and Fabio who, more than everyone, had to bear with me. I would like to also thank all my extra-Poli friends, especially Alberto, for your support and the long talks throughout these years, Zach, for being so close although the great distance between us, Bea’s family, for all the Sundays and summers spent together, and my soccer team Belfiga FC, for being the crazy lovable people you are. A huge acknowledgment needs to be address to my family: to my grandfather Luciano, for being a great friend; to my grandmother Bianca, for teaching me what “fighting” means; to my grandparents Beppe and Etta, for protecting me -
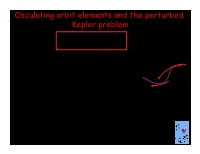
Osculating Orbit Elements and the Perturbed Kepler Problem
Osculating orbit elements and the perturbed Kepler problem Gmr a = 3 + f(r, v,t) Same − r x & v Define: r := rn ,r:= p/(1 + e cos f) ,p= a(1 e2) − osculating orbit he sin f h v := n + λ ,h:= Gmp p r n := cos ⌦cos(! + f) cos ◆ sinp ⌦sin(! + f) e − X +⇥ sin⌦cos(! + f) + cos ◆ cos ⌦sin(! + f⇤) eY actual orbit +sin⇥ ◆ sin(! + f) eZ ⇤ λ := cos ⌦sin(! + f) cos ◆ sin⌦cos(! + f) e − − X new osculating + sin ⌦sin(! + f) + cos ◆ cos ⌦cos(! + f) e orbit ⇥ − ⇤ Y +sin⇥ ◆ cos(! + f) eZ ⇤ hˆ := n λ =sin◆ sin ⌦ e sin ◆ cos ⌦ e + cos ◆ e ⇥ X − Y Z e, a, ω, Ω, i, T may be functions of time Perturbed Kepler problem Gmr a = + f(r, v,t) − r3 dh h = r v = = r f ⇥ ) dt ⇥ v h dA A = ⇥ n = Gm = f h + v (r f) Gm − ) dt ⇥ ⇥ ⇥ Decompose: f = n + λ + hˆ R S W dh = r λ + r hˆ dt − W S dA Gm =2h n h + rr˙ λ rr˙ hˆ. dt S − R S − W Example: h˙ = r S d (h cos ◆)=h˙ e dt · Z d◆ h˙ cos ◆ h sin ◆ = r cos(! + f)sin◆ + r cos ◆ − dt − W S Perturbed Kepler problem “Lagrange planetary equations” dp p3 1 =2 , dt rGm 1+e cos f S de p 2 cos f + e(1 + cos2 f) = sin f + , dt Gm R 1+e cos f S r d◆ p cos(! + f) = , dt Gm 1+e cos f W r d⌦ p sin(! + f) sin ◆ = , dt Gm 1+e cos f W r d! 1 p 2+e cos f sin(! + f) = cos f + sin f e cot ◆ dt e Gm − R 1+e cos f S− 1+e cos f W r An alternative pericenter angle: $ := ! +⌦cos ◆ d$ 1 p 2+e cos f = cos f + sin f dt e Gm − R 1+e cos f S r Perturbed Kepler problem Comments: § these six 1st-order ODEs are exactly equivalent to the original three 2nd-order ODEs § if f = 0, the orbit elements are constants § if f << Gm/r2, use perturbation theory -

In-Depth Review of Satellite Imagery / Earth Observation Technology in Official Statistics Prepared by Canada and Mexico
In-depth review of satellite imagery / earth observation technology in official statistics Prepared by Canada and Mexico Julio A. Santaella Conference of European Statisticians 67th plenary session Paris, France June 28, 2019 Earth observation (EO) EO is the gathering of information about planet Earth’s physical, chemical and biological systems. It involves monitoring and assessing the status of, and changes in, the natural and man-made environment Measurements taken by a thermometer, wind gauge, ocean buoy, altimeter or seismograph Photographs and satellite imagery Radar and sonar images Analyses of water or soil samples EO examples EO Processed information such as maps or forecasts Source: Group on Earth Observations (GEO) In-depth review of satellite imagery / earth observation technology in official statistics 2 Introduction Satellite imagery uses have expanded over time Satellite imagery provide generalized data for large areas at relatively low cost: Aligned with NSOs needs to produce more information at lower costs NSOs are starting to consider EO technology as a data collection instrument for purposes beyond agricultural statistics In-depth review of satellite imagery / earth observation technology in official statistics 3 Scope and definition of the review To survey how various types of satellite data and the techniques used to process or analyze them support the GSBPM To improve coordination of statistical activities in the UNECE region, identify gaps or duplication of work, and address emerging issues In-depth review of satellite imagery / earth observation technology in official statistics 4 Overview of recent activities • EO technology has developed progressively, encouraging the identification of new applications of this infrastructure data. -

Astrodynamics
Politecnico di Torino SEEDS SpacE Exploration and Development Systems Astrodynamics II Edition 2006 - 07 - Ver. 2.0.1 Author: Guido Colasurdo Dipartimento di Energetica Teacher: Giulio Avanzini Dipartimento di Ingegneria Aeronautica e Spaziale e-mail: [email protected] Contents 1 Two–Body Orbital Mechanics 1 1.1 BirthofAstrodynamics: Kepler’sLaws. ......... 1 1.2 Newton’sLawsofMotion ............................ ... 2 1.3 Newton’s Law of Universal Gravitation . ......... 3 1.4 The n–BodyProblem ................................. 4 1.5 Equation of Motion in the Two-Body Problem . ....... 5 1.6 PotentialEnergy ................................. ... 6 1.7 ConstantsoftheMotion . .. .. .. .. .. .. .. .. .... 7 1.8 TrajectoryEquation .............................. .... 8 1.9 ConicSections ................................... 8 1.10 Relating Energy and Semi-major Axis . ........ 9 2 Two-Dimensional Analysis of Motion 11 2.1 ReferenceFrames................................. 11 2.2 Velocity and acceleration components . ......... 12 2.3 First-Order Scalar Equations of Motion . ......... 12 2.4 PerifocalReferenceFrame . ...... 13 2.5 FlightPathAngle ................................. 14 2.6 EllipticalOrbits................................ ..... 15 2.6.1 Geometry of an Elliptical Orbit . ..... 15 2.6.2 Period of an Elliptical Orbit . ..... 16 2.7 Time–of–Flight on the Elliptical Orbit . .......... 16 2.8 Extensiontohyperbolaandparabola. ........ 18 2.9 Circular and Escape Velocity, Hyperbolic Excess Speed . .............. 18 2.10 CosmicVelocities -

Orbit Options for an Orion-Class Spacecraft Mission to a Near-Earth Object
Orbit Options for an Orion-Class Spacecraft Mission to a Near-Earth Object by Nathan C. Shupe B.A., Swarthmore College, 2005 A thesis submitted to the Faculty of the Graduate School of the University of Colorado in partial fulfillment of the requirements for the degree of Master of Science Department of Aerospace Engineering Sciences 2010 This thesis entitled: Orbit Options for an Orion-Class Spacecraft Mission to a Near-Earth Object written by Nathan C. Shupe has been approved for the Department of Aerospace Engineering Sciences Daniel Scheeres Prof. George Born Assoc. Prof. Hanspeter Schaub Date The final copy of this thesis has been examined by the signatories, and we find that both the content and the form meet acceptable presentation standards of scholarly work in the above mentioned discipline. iii Shupe, Nathan C. (M.S., Aerospace Engineering Sciences) Orbit Options for an Orion-Class Spacecraft Mission to a Near-Earth Object Thesis directed by Prof. Daniel Scheeres Based on the recommendations of the Augustine Commission, President Obama has pro- posed a vision for U.S. human spaceflight in the post-Shuttle era which includes a manned mission to a Near-Earth Object (NEO). A 2006-2007 study commissioned by the Constellation Program Advanced Projects Office investigated the feasibility of sending a crewed Orion spacecraft to a NEO using different combinations of elements from the latest launch system architecture at that time. The study found a number of suitable mission targets in the database of known NEOs, and pre- dicted that the number of candidate NEOs will continue to increase as more advanced observatories come online and execute more detailed surveys of the NEO population. -

Detecting, Tracking and Imaging Space Debris
r bulletin 109 — february 2002 Detecting, Tracking and Imaging Space Debris D. Mehrholz, L. Leushacke FGAN Research Institute for High-Frequency Physics and Radar Techniques, Wachtberg, Germany W. Flury, R. Jehn, H. Klinkrad, M. Landgraf European Space Operations Centre (ESOC), Darmstadt, Germany Earth’s space-debris environment tracked, with estimates for the number of Today’s man-made space-debris environment objects larger than 1 cm ranging from 100 000 has been created by the space activities to 200 000. that have taken place since Sputnik’s launch in 1957. There have been more than 4000 The sources of this debris are normal launch rocket launches since then, as well as many operations (Fig. 2), certain operations in space, other related debris-generating occurrences fragmentations as a result of explosions and such as more than 150 in-orbit fragmentation collisions in space, firings of satellite solid- events. rocket motors, material ageing effects, and leaking thermal-control systems. Solid-rocket Among the more than 8700 objects larger than 10 cm in Earth orbits, motors use aluminium as a catalyst (about 15% only about 6% are operational satellites and the remainder is space by mass) and when burning they emit debris. Europe currently has no operational space surveillance aluminium-oxide particles typically 1 to 10 system, but a powerful radar facility for the detection and tracking of microns in size. In addition, centimetre-sized space debris and the imaging of space objects is available in the form objects are formed by metallic aluminium melts, of the 34 m dish radar at the Research Establishment for Applied called ‘slag’. -

Spacecraft Network Operations Demonstration Using
Nodes Spacecraft Network Operations Demonstration Using Multiple Spacecraft in an Autonomously Configured Space Network Allowing Crosslink Communications and Multipoint Scientific Measurements Nodes is a technology demonstration mission that was launched to the International Space Station on December 6, 2015. The two Nodes satellites subsequently deployed from the Station on May 16, 2016 to demonstrate new network capabilities critical to the operation of swarms of spacecraft. The Nodes satellites accomplished all of their planned mission objectives including three technology ‘firsts’ for small spacecraft: commanding a spacecraft not in direct contact with the ground by crosslinking commands through a space network; crosslinking science data from one Nodes satellite to the second Nodes spacecraft deployed into low Earth orbit satellite before sending it to the ground; and communication, one ultra high frequency autonomous reconfiguration of the space (UHF) radio for crosslink communication, and communications network using the capability an additional UHF beacon radio to transmit of Nodes to automatically select which state-of-health information. satellite is best suited to serve as the ground relay each day. The Nodes science instruments, identical to those on the EDSN satellites, collected The Nodes mission consists of two 1.5- data on the charged particle environment unit (1.5U) CubeSats, each weighing at an altitude of about 250 miles (400 approximately 4.5 pounds (2 kilograms) and kilometers) above Earth. These Energetic measuring about 4 inches x 4 inches x 6.5 Particle Integrating Space Environment inches (10 centimeters x 10 centimeters x Monitor (EPISEM) radiation sensors were 16 centimeters). This mission followed last provided by Montana State University in year’s attempted launch of the eight small Bozeman, Montana, under contract to satellites of the Edison Demonstration of NASA. -

Build a Spacecraft Activity
UAMN Virtual Family Day: Amazing Earth Build a Spacecraft SMAP satellite. Image: NASA. Discover how scientists study Earth from above! Scientists use satellites and spacecraft to study the Earth from outer space. They take pictures of Earth's surface and measure cloud cover, sea levels, glacier movements, and more. Materials Needed: Paper, pencil, craft materials (small recycled boxes, cardboard pieces, paperclips, toothpicks, popsicle sticks, straws, cotton balls, yarn, etc. You can use whatever supplies you have!), fastening materials (glue, tape, rubber bands, string, etc.) Instructions: Step 1: Decide what you want your spacecraft to study. Will it take pictures of clouds? Track forest fires? Measure rainfall? Be creative! Step 2: Design your spacecraft. Draw a picture of what your spacecraft will look like. It will need these parts: Container: To hold everything together. Power Source: To create electricity; solar panels, batteries, etc. Scientific Instruments: This is the why you launched your satellite in the first place! Instruments could include cameras, particle collectors, or magnometers. Communication Device: To relay information back to Earth. Image: NASA SpacePlace. Orientation Finder: A sun or star tracker to show where the spacecraft is pointed. Step 3: Build your spacecraft! Use any craft materials you have available. Let your imagination go wild. Step 4: Your spacecraft will need to survive launching into orbit. Test your spacecraft by gently shaking or spinning it. How well did it hold together? Adjust your design and try again! Model spacecraft examples. Courtesy NASA SpacePlace. Activity adapted from NASA SpacePlace: spaceplace.nasa.gov/build-a-spacecraft/en/ UAMN Virtual Early Explorers: Amazing Earth Studying Earth From Above NASA is best known for exploring outer space, but it also conducts many missions to investigate Earth from above. -

Orbit Determination Using Modern Filters/Smoothers and Continuous Thrust Modeling
Orbit Determination Using Modern Filters/Smoothers and Continuous Thrust Modeling by Zachary James Folcik B.S. Computer Science Michigan Technological University, 2000 SUBMITTED TO THE DEPARTMENT OF AERONAUTICS AND ASTRONAUTICS IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF MASTER OF SCIENCE IN AERONAUTICS AND ASTRONAUTICS AT THE MASSACHUSETTS INSTITUTE OF TECHNOLOGY JUNE 2008 © 2008 Massachusetts Institute of Technology. All rights reserved. Signature of Author:_______________________________________________________ Department of Aeronautics and Astronautics May 23, 2008 Certified by:_____________________________________________________________ Dr. Paul J. Cefola Lecturer, Department of Aeronautics and Astronautics Thesis Supervisor Certified by:_____________________________________________________________ Professor Jonathan P. How Professor, Department of Aeronautics and Astronautics Thesis Advisor Accepted by:_____________________________________________________________ Professor David L. Darmofal Associate Department Head Chair, Committee on Graduate Students 1 [This page intentionally left blank.] 2 Orbit Determination Using Modern Filters/Smoothers and Continuous Thrust Modeling by Zachary James Folcik Submitted to the Department of Aeronautics and Astronautics on May 23, 2008 in Partial Fulfillment of the Requirements for the Degree of Master of Science in Aeronautics and Astronautics ABSTRACT The development of electric propulsion technology for spacecraft has led to reduced costs and longer lifespans for certain -

Positioning: Drift Orbit and Station Acquisition
Orbits Supplement GEOSTATIONARY ORBIT PERTURBATIONS INFLUENCE OF ASPHERICITY OF THE EARTH: The gravitational potential of the Earth is no longer µ/r, but varies with longitude. A tangential acceleration is created, depending on the longitudinal location of the satellite, with four points of stable equilibrium: two stable equilibrium points (L 75° E, 105° W) two unstable equilibrium points ( 15° W, 162° E) This tangential acceleration causes a drift of the satellite longitude. Longitudinal drift d'/dt in terms of the longitude about a point of stable equilibrium expresses as: (d/dt)2 - k cos 2 = constant Orbits Supplement GEO PERTURBATIONS (CONT'D) INFLUENCE OF EARTH ASPHERICITY VARIATION IN THE LONGITUDINAL ACCELERATION OF A GEOSTATIONARY SATELLITE: Orbits Supplement GEO PERTURBATIONS (CONT'D) INFLUENCE OF SUN & MOON ATTRACTION Gravitational attraction by the sun and moon causes the satellite orbital inclination to change with time. The evolution of the inclination vector is mainly a combination of variations: period 13.66 days with 0.0035° amplitude period 182.65 days with 0.023° amplitude long term drift The long term drift is given by: -4 dix/dt = H = (-3.6 sin M) 10 ° /day -4 diy/dt = K = (23.4 +.2.7 cos M) 10 °/day where M is the moon ascending node longitude: M = 12.111 -0.052954 T (T: days from 1/1/1950) 2 2 2 2 cos d = H / (H + K ); i/t = (H + K ) Depending on time within the 18 year period of M d varies from 81.1° to 98.9° i/t varies from 0.75°/year to 0.95°/year Orbits Supplement GEO PERTURBATIONS (CONT'D) INFLUENCE OF SUN RADIATION PRESSURE Due to sun radiation pressure, eccentricity arises: EFFECT OF NON-ZERO ECCENTRICITY L = difference between longitude of geostationary satellite and geosynchronous satellite (24 hour period orbit with e0) With non-zero eccentricity the satellite track undergoes a periodic motion about the subsatellite point at perigee. -

Space Sector Brochure
SPACE SPACE REVOLUTIONIZING THE WAY TO SPACE SPACECRAFT TECHNOLOGIES PROPULSION Moog provides components and subsystems for cold gas, chemical, and electric Moog is a proven leader in components, subsystems, and systems propulsion and designs, develops, and manufactures complete chemical propulsion for spacecraft of all sizes, from smallsats to GEO spacecraft. systems, including tanks, to accelerate the spacecraft for orbit-insertion, station Moog has been successfully providing spacecraft controls, in- keeping, or attitude control. Moog makes thrusters from <1N to 500N to support the space propulsion, and major subsystems for science, military, propulsion requirements for small to large spacecraft. and commercial operations for more than 60 years. AVIONICS Moog is a proven provider of high performance and reliable space-rated avionics hardware and software for command and data handling, power distribution, payload processing, memory, GPS receivers, motor controllers, and onboard computing. POWER SYSTEMS Moog leverages its proven spacecraft avionics and high-power control systems to supply hardware for telemetry, as well as solar array and battery power management and switching. Applications include bus line power to valves, motors, torque rods, and other end effectors. Moog has developed products for Power Management and Distribution (PMAD) Systems, such as high power DC converters, switching, and power stabilization. MECHANISMS Moog has produced spacecraft motion control products for more than 50 years, dating back to the historic Apollo and Pioneer programs. Today, we offer rotary, linear, and specialized mechanisms for spacecraft motion control needs. Moog is a world-class manufacturer of solar array drives, propulsion positioning gimbals, electric propulsion gimbals, antenna positioner mechanisms, docking and release mechanisms, and specialty payload positioners. -

Orbit Conjunction Filters Final
AAS 09-372 A DESCRIPTION OF FILTERS FOR MINIMIZING THE TIME REQUIRED FOR ORBITAL CONJUNCTION COMPUTATIONS James Woodburn*, Vincent Coppola† and Frank Stoner‡ Classical filters used in the identification of orbital conjunctions are described and examined for potential failure cases. Alternative implementations of the filters are described which maintain the spirit of the original concepts but improve robustness. The computational advantage provided by each filter when applied to the one versus all and the all versus all orbital conjunction problems are presented. All of the classic filters are shown to be applicable to conjunction detection based on tabulated ephemerides in addition to two line element sets. INTRODUCTION The problem of on-orbit collisions or near collisions is receiving increased attention in light of the recent collision between an Iridium satellite and COSMOS 2251. More recently, the crew of the International Space Station was evacuated to the Soyuz module until a chunk of debris had safely passed. Dealing with the reality of an ever more crowded space environment requires the identification of potentially dangerous orbital conjunctions followed by the selection of an appropriate course of action. This text serves to describe the process of identifying all potential orbital conjunctions, or more specifically, the techniques used to allow the computations to be performed reliably and within a reasonable period of time. The identification of potentially dangerous conjunctions is most commonly done by determining periods of time when two objects have an unacceptable risk of collision. For this analysis, we will use the distance between the objects as our proxy for risk of collision.