Apollo 15 Press
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Student Worksheets, Assessments, and Answer Keys
Apollo Mission Worksheet Team Names _________________________ Your team has been assigned Apollo Mission _______ Color _________________ 1. Go to google.com/moon and find your mission, click on it and then zoom in. 2. Find # 1, this will give you information to answer the questions below. 3. On your moon map, find the location of the mission landing site and locate this spot on your map. Choose a symbol and the correct color for your mission (each mission has a specific symbol and you can use this if you like or make up your own). In the legend area put your symbol and mission number. 4. Who were the astronauts on the mission? The astronauts on the mission were ______________________________________ ______________________________________________________________________ 5. When did the mission take place? The mission took place from _______________________________________________ 6. How many days did the mission last? The mission lasted ______________________________________________________ 7. Where did the mission land? The mission landed at____________________________________________________ 8. Why did the mission land here? They landed at this location because ________________________________________ ___________________________________________________________________________ _______________________________________________________________________ 9. What was the goal of the mission? The goal of the mission was_______________________________________________ ______________________________________________________________________ ___________________________________________________________________________ -

USGS Open-File Report 2005-1190, Table 1
TABLE 1 GEOLOGIC FIELD-TRAINING OF NASA ASTRONAUTS BETWEEN JANUARY 1963 AND NOVEMBER 1972 The following is a year-by-year listing of the astronaut geologic field training trips planned and led by personnel from the U.S. Geological Survey’s Branches of Astrogeology and Surface Planetary Exploration, in collaboration with the Geology Group at the Manned Spacecraft Center, Houston, Texas at the request of NASA between January 1963 and November 1972. Regional geologic experts from the U.S. Geological Survey and other governmental organizations and universities s also played vital roles in these exercises. [The early training (between 1963 and 1967) involved a rather large contingent of astronauts from NASA groups 1, 2, and 3. For another listing of the astronaut geologic training trips and exercises, including all attending and the general purposed of the exercise, the reader is referred to the following website containing a contribution by William Phinney (Phinney, book submitted to NASA/JSC; also http://www.hq.nasa.gov/office/pao/History/alsj/ap-geotrips.pdf).] 1963 16-18 January 1963: Meteor Crater and San Francisco Volcanic Field near Flagstaff, Arizona (9 astronauts). Among the nine astronaut trainees in Flagstaff for that initial astronaut geologic training exercise was Neil Armstrong--who would become the first man to step foot on the Moon during the historic Apollo 11 mission in July 1969! The other astronauts present included Frank Borman (Apollo 8), Charles "Pete" Conrad (Apollo 12), James Lovell (Apollo 8 and the near-tragic Apollo 13), James McDivitt, Elliot See (killed later in a plane crash), Thomas Stafford (Apollo 10), Edward White (later killed in the tragic Apollo 1 fire at Cape Canaveral), and John Young (Apollo 16). -
A Comparative Analysis of the Geology Tools Used During the Apollo Lunar Program and Their Suitability for Future Missions to the Om on Lindsay Kathleen Anderson
University of North Dakota UND Scholarly Commons Theses and Dissertations Theses, Dissertations, and Senior Projects January 2016 A Comparative Analysis Of The Geology Tools Used During The Apollo Lunar Program And Their Suitability For Future Missions To The oM on Lindsay Kathleen Anderson Follow this and additional works at: https://commons.und.edu/theses Recommended Citation Anderson, Lindsay Kathleen, "A Comparative Analysis Of The Geology Tools Used During The Apollo Lunar Program And Their Suitability For Future Missions To The oonM " (2016). Theses and Dissertations. 1860. https://commons.und.edu/theses/1860 This Thesis is brought to you for free and open access by the Theses, Dissertations, and Senior Projects at UND Scholarly Commons. It has been accepted for inclusion in Theses and Dissertations by an authorized administrator of UND Scholarly Commons. For more information, please contact [email protected]. A COMPARATIVE ANALYSIS OF THE GEOLOGY TOOLS USED DURING THE APOLLO LUNAR PROGRAM AND THEIR SUITABILITY FOR FUTURE MISSIONS TO THE MOON by Lindsay Kathleen Anderson Bachelor of Science, University of North Dakota, 2009 A Thesis Submitted to the Graduate Faculty of the University of North Dakota in partial fulfillment of the requirements for the degree of Master of Science Grand Forks, North Dakota May 2016 Copyright 2016 Lindsay Anderson ii iii PERMISSION Title A Comparative Analysis of the Geology Tools Used During the Apollo Lunar Program and Their Suitability for Future Missions to the Moon Department Space Studies Degree Master of Science In presenting this thesis in partial fulfillment of the requirements for a graduate degree from the University of North Dakota, I agree that the library of this University shall make it freely available for inspection. -

Stereo Reconstruction from Apollo 15 and 16 Metric Camerazachary
42nd Lunar and Planetary Science Conference (2011) 2267.pdf Stereo Reconstruction from Apollo 15 and 16 Metric Camera Zachary Moratto1, Ara Nefian1,2, Taemin Kim1, Michael Broxton1,2, Ross Beyer1,3, and Terry Fong1, 1NASA Ames Research Center, MS 269-3, Moffett Field, CA, USA ([email protected]), 2Carnegie Mellon University, 3Carl Sagan Center SETI Introduction saic, DIM, and precision maps are produced for both This paper presents the production of digital terrain mod- missions separately. els (DTMs) and digital image mosaics (DIMs) of the Lu- The DTM mosaic is formed by a weighted average of nar surface that cover a large portion of the near-side of the stereo pair DTMs. Input DTMs were weighted max- the Moon at 40 m/px and 10 m/px respectively. These imum value at their centers and then feathered to zero at data products, produced under direction of the NASA the edges. The DTM mosaics are shown in Fig. 1 and 2. ESMD Lunar Mapping and Modeling Project (LMMP), The DIM was created by projecting the original res- are based on 2600 stereo image pairs from the Apollo olution images onto the 40 m/px DTMs, creating indi- 15 and 16 missions that were digitized at high resolution vidual orthoimages. Those orthoimages were then mo- from the original mission films [1]. Our reconstruction saicked by a process described in [5] without reflectance. was carried out using the highly automated Ames Stereo Therefore, only the final image mosaic and time expo- Pipeline software [2], which runs on NASA’s Pleiades sures were calculated. -
Waltham on the Moon, Apollo 15 and the Search for the Holy Grail
Waltham on the Moon, Apollo 15 and the Search for the Holy Grail. Post contains Pict... Page 1 of 3 [ View Thread ] [ Return to Index ] [ Read Prev Msg ] [ Read Next Msg ] 'Poor Man's' Watch Forum ARCHIVE Waltham on the Moon, Apollo 15 and the Search for the Holy Grail. Posted By: Kelly M. Rayburn <[email protected]> Date: Wednesday, 27 August 2003, at 2:21 a.m. (Reto was kind enough to ask me to repost my earlier post on the above topic for the archives on the new server. It contains nothing new except the post script. If you have already read the post, please disregard.) Hi all: In preparation for purchasing an Omega Speedmaster Professional, I have done the obligatory research on the use of the Speedmaster in the NASA space program. Chuck Maddox's excellent article on Omega's history with the Apollo program revealed some interesting facts that I did not know. In brief: The cal. 321 Speedmasters were purchased by NASA for the astronauts' use prior to the introduction of the cal. 861 movement in 1968. Apparently it is generally accepted that only the cal. 321 Speedmasters were worn on the moon during the various moon missions, as the initial procurement of these watches around 1965 was distributed to all astonauts at that time (two each) with as many as twenty still left in inventory and never used following the final Apollo 17 mission in 1972. Apparently, there is no evidence that a cal. 861 Speedmaster was worn by any of the moonwalkers or that NASA had procured any cal. -

Destination Moon Cover 2.Indd 1 9/24/2004 9:34:13 AM to All My Grandchildren and to All the Children of the Blue Planet
destination: moon destination: destination: im Irwin was a great scientist, and a great [James Irwin’s] life has enriched mine through his astronaut, but he was an even greater loving, caring, gracious, sensitive spirit. Christian. Because of his faith in God, we —Bill Bright, Campus Crusade for Christ can be assured he is in Heaven, and instead of viewing the earth from the perspective [Destination: Moon] is a story that exemplifi es of the moon, he can see the whole universe bravery, technology, and Jim’s personal encounter from his new eternal home! with God. A great read and wonderful keepsake, —Rev. Billy Graham I enthusiastically recommend Destination: Moon. —Senator William L. Armstrong James Irwin took a magnifi cent trip to the moon.... Aft er reading Destination: I can’t imagine what it must have been like to Th e Spiritual and Scientifi c Voyage of the Moon, you may feel like you made the trip with praise the God of creation while standing on the astronaut Irwin. I did. Maybe, you will want to moon. Jim Irwin has left a legacy in this book Eighth Man to Walk on the Moon make the trip for real yourself someday. I have to enable each one of us to have a sense of what not done that. However, you can. Someday! this must have been like. —Tom Hanks, Actor, “Apollo 13” —Ken Ham, President, Answers in Genesis Destination: Moon clearly captures the thrill of a lunar adventure.... Jim’s life, this book—and his testimony to God’s grace and goodness—will have a lasting infl uence on many people. -

Through Astronaut Eyes: Photographing Early Human Spaceflight
Purdue University Purdue e-Pubs Purdue University Press Book Previews Purdue University Press 6-2020 Through Astronaut Eyes: Photographing Early Human Spaceflight Jennifer K. Levasseur Follow this and additional works at: https://docs.lib.purdue.edu/purduepress_previews This document has been made available through Purdue e-Pubs, a service of the Purdue University Libraries. Please contact [email protected] for additional information. THROUGH ASTRONAUT EYES PURDUE STUDIES IN AERONAUTICS AND ASTRONAUTICS James R. Hansen, Series Editor Purdue Studies in Aeronautics and Astronautics builds on Purdue’s leadership in aeronautic and astronautic engineering, as well as the historic accomplishments of many of its luminary alums. Works in the series will explore cutting-edge topics in aeronautics and astronautics enterprises, tell unique stories from the history of flight and space travel, and contemplate the future of human space exploration and colonization. RECENT BOOKS IN THE SERIES British Imperial Air Power: The Royal Air Forces and the Defense of Australia and New Zealand Between the World Wars by Alex M Spencer A Reluctant Icon: Letters to Neil Armstrong by James R. Hansen John Houbolt: The Unsung Hero of the Apollo Moon Landings by William F. Causey Dear Neil Armstrong: Letters to the First Man from All Mankind by James R. Hansen Piercing the Horizon: The Story of Visionary NASA Chief Tom Paine by Sunny Tsiao Calculated Risk: The Supersonic Life and Times of Gus Grissom by George Leopold Spacewalker: My Journey in Space and Faith as NASA’s Record-Setting Frequent Flyer by Jerry L. Ross THROUGH ASTRONAUT EYES Photographing Early Human Spaceflight Jennifer K. -

Appendix a Apollo 15: “The Problem We Brought Back from the Moon”
Appendix A Apollo 15: “The Problem We Brought Back From the Moon” Postal Covers Carried on Apollo 151 Among the best known collectables from the Apollo Era are the covers flown onboard the Apollo 15 mission in 1971, mainly because of what the mission’s Lunar Module Pilot, Jim Irwin, called “the problem we brought back from the Moon.” [1] The crew of Apollo 15 carried out one of the most complete scientific explorations of the Moon and accomplished several firsts, including the first lunar roving vehicle that was operated on the Moon to extend the range of exploration. Some 81 kilograms (180 pounds) of lunar surface samples were returned for anal- ysis, and a battery of very productive lunar surface and orbital experiments were conducted, including the first EVA in deep space. [2] Yet the Apollo 15 crew are best remembered for carrying envelopes to the Moon, and the mission is remem- bered for the “great postal caper.” [3] As noted in Chapter 7, Apollo 15 was not the first mission to carry covers. Dozens were carried on each flight from Apollo 11 onwards (see Table 1 for the complete list) and, as Apollo 15 Commander Dave Scott recalled in his book, the whole business had probably been building since Mercury, through Gemini and into Apollo. [4] People had a fascination with objects that had been carried into space, and that became more and more popular – and valuable – as the programs progressed. Right from the start of the Mercury program, each astronaut had been allowed to carry a certain number of personal items onboard, with NASA’s permission, in 1 A first version of this material was issued as Apollo 15 Cover Scandal in Orbit No. -
NASA - Apollo 13
Press Kit NASA - Apollo 13 Ä - 1970 - National Aeronautics and Space Administration Ä - 2010 - National Aeronautics and Space Administration Restored version by Matteo Negri (Italy) Web: http://www.siamoandatisullaluna.com NATIONAL AERONAUTICS AND SPACE ADMINISTRATION WO 2-4155 I NEWS WASHINGTON,D .C. 20546 TELS4 WO 3-6925 FOR RELEASr? THURSDAY A.M. 2, 1970 RELEASE NO: 70-~OK April P R F. E S S K I T 2 -0- t RELEASE NO: 70-50 APOLLO 13 THIRD LUNAR LANDING MISSION Apollo 13, the third U.S. manned lunar landing mission, will be launchefi April 11 from Kennedy Space Center, Fla., to explore a hilly upland region of the Moon and bring back rocks perhaps five billion years old, The Apollo 13 lunar module will stay on the Moon more than 33 hours and the landing crew will leave the spacecraft twice to emplace scientific experiments on the lunar surface and to continue geological investigations. The Apollo 13 landing site is in the Fra Mauro uplands; the two National Aeronautics and Space Administration ppevious landings were in mare or ''sea" areas, Apollo 11 in the Sea of Tranqullfty and Apollo 12 in the Ocean of Storms. Apollo 13 crewmen are commander James A. Lovell, Jr.; command module pilot momas K. MBttingly 111, and lunar module pilot Fred W. Haise, Jr. Lovell is a U.S. Navy captain, Mattingly a Navy lieutenant commander, and Haise a civllian. -more- 3/26/70 Launch vehicle is a Saturn V. Apollo 13 objectives are: * Perform selenological inspection, survey and sampling of materials in a preselected region of the Fra Mauro formation, c Deploy and activate an Apollo Lunar Surface Experiment Package (ALSEP) , * Develop man's capability to work in the lunar environment. -

Apollo 15 Press
6 pwwmr%wp NATIONAL AERONAUTICS AND SPACE ADMINISTRATION TELS. WO 2-4155 NEWS WASHINGTON,D.C. 20546 WO 3-6925 FOR RELEASE: THURSDAY A.M. July 15, 1971 RELEASE NO: 71-1I9K PROJECT: APOLLO 15 (To be launched no P earlier than July 26) R contents E GENERAL RELEASE 1-8 COUNTDOWN 9-11 Launch Windows 11 Ground Elapsed Time Update 12 S Launch and Mission Profile 13 Launch Events 14 Mission Events 15-32 S EVA Mission Events 21-29 Entry Events 33 Recovery Operations 34-36 APOLLO 15 MISSION OBJECTIVES 37-39 Lunar Surface Science 40 Passive Seismic Experiment 40-47 Lunar Surface Magnetometer 47-50 Solar Wind Spectrometer 50-51 Suprathermal Ion Detector Experiment and Cold Cathode Gauge Experiment 51-52 K Lunar Heat Flow Experiment 52-55 Lunar Dust Detector Experiment 55 ALSEP Central Station 55-56 Laser Ranging Retro-Reflector Experiment 56 Solar Wind Composition Experiment 56 SNAP-27--Power Source for ALSEP 57-58 Lunar Geology Investigation 59-60 Soil Mechanics 60 Lunar Orbital Science 61 Gamma-Ray Spectrometer 61 X-Ray Fluorescence Spectrometer 61 Alpha-Particle Spectrometer 61 Mass Spectrometer 62 24-inch Panoramic Camera 62 3-inch Mapping Camera 62-63 Laser Altimeter 64 Subsatellite 64-66 UV Photography-Earth and Moon 66 -more- 6/30/71 -i2- Gegenschein from Lunar Orbit 66 CSM/LM S-Band Transponder 67 Bistatic Radar Experiment 67-68 Apollo Window Meteoroid 68 Composite Casting Demonstration 68A Engineering/Operational Objectives 69 APOLLO LUNAR HAND TOOLS- 70-74 HADLEY-APENNINE LANDING SITE 75-76 LUNAR -
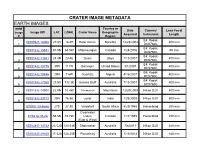
CRATER IMAGE METADATA EARTH IMAGES Country Or BMM Date Camera/ Lens Focal Image Image ID# LAT
CRATER IMAGE METADATA EARTH IMAGES Country or BMM Date Camera/ Lens Focal Image Image ID# LAT. LONG. Crater Name Geographic Acquired Instrument Length # Region E4: Kodak ISS006-E-16068 27.8S 16.4E Roter Kamm Namibia 12/28/2002 400 mm 1 DCS760C E4: Kodak ISS012-E-15881 51.5N 68.5W Manicouagan Canada 1/24/2006 50 mm 2 DCS760C E4: Kodak ISS014-E-11841 24.4N 24.4E Oasis Libya 1/13/2007 400 mm 3 DCS760C E4: Kodak ISS014-E-15775 35N 111W Barringer United States 3/1/2007 400 mm 4 DCS760C E4: Kodak ISS014-E-19496 29N 7.6W Ouarkziz Algeria 4/16/2007 800 mm 5 DCS760C E4: Kodak ISS015-E-17360 23.9S 132.3E Gosses Bluff Australia 7/13/2007 400 mm 6 DCS760C ISS018-E-14908 22.9N 10.4W Tenoumer Mauritania 12/20/2008 Nikon D2X 800 mm 7 ISS018-E-23713 20N 76.5E Lonar India 1/28/2009 Nikon D2X 800 mm 8 STS51I-33-56AA 27S 27.3E Vredefort South Africa 8/29/1985 Hasselblad 250 mm Clearwater STS61A-35-86 56.5N 74.7W Lakes Canada 11/1/1985 Hasselblad 250 mm (East & West) ISS028-E-14782 25.52S 120.53E Shoemaker Australia 7/6/2011 Nikon D2X 200 mm ISS034-E-29105 17.32S 128.25E Piccaninny Australia 1/15/2013 Nikon D2X 180 mm CRATER IMAGE METADATA MARS IMAGES BMM Geographic *Date or Camera/ Image Image ID# LAT. LONG. Crater Name Approx. YR Mission Name Region Instrument # Acquired PIA14290 5.4S 137.8E Gale Aeolis Mensae 2000's THEMIS IR Odyssey THEMIS IR Aeolis 14.5S 175.4E Gusev 2000's THEMIS IR Odyssey MOSAIC Quadrangle Mars Orbiter Colorized MOLA 42S 67E Hellas Basin Hellas Planitia 2000's Laser Altimeter Global Surveyor (MOLA) Viking Orbiter Margaritifer Visual -

Seeds of Discovery: Chapters in the Economic History of Innovation Within NASA
Seeds of Discovery: Chapters in the Economic History of Innovation within NASA Edited by Roger D. Launius and Howard E. McCurdy 2015 MASTER FILE AS OF Friday, January 15, 2016 Draft Rev. 20151122sj Seeds of Discovery (Launius & McCurdy eds.) – ToC Link p. 1 of 306 Table of Contents Seeds of Discovery: Chapters in the Economic History of Innovation within NASA .............................. 1 Introduction: Partnerships for Innovation ................................................................................................ 7 A Characterization of Innovation ........................................................................................................... 7 The Innovation Process .......................................................................................................................... 9 The Conventional Model ....................................................................................................................... 10 Exploration without Innovation ........................................................................................................... 12 NASA Attempts to Innovate .................................................................................................................. 16 Pockets of Innovation............................................................................................................................ 20 Things to Come ...................................................................................................................................... 23