J-Link / J-Trace User Guide (UM08001)
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

NXP Powerpoint Template Confidential 16:9 Widescreen
NXP MCU PRODUCT UPDATE & ROADMAP Q4 2016 NXP’S MCU POWERHOUSE PORTFOLIO 1 PUBLIC USE NXP Microcontrollers Business Line Why Customers Choose Us Applications • Comprehensive portfolio supporting the diverse IoT landscape Wearable / Healthcare • Fitness & Wireless Healthcare • Extensive software and development environment • Diabetes & Cardiac Care • Diagnostics & therapy • Industry leading customer support, quality, and longevity Home & Building Automation • Broad ecosystem of partners enabling system solutions • Smart meters & grid • Integrated wireless connectivity solutions • Ease of use solutions tailored for mass market • Home energy control Smart Accessories • Game controllers and consoles Example Customers • Wearable computing • eReaders, tablets, portable navigation Vehicle Networking & Information • Infotainment, software define radio • Navigation systems, E-call Home Appliances • Energy efficient refrigerators, dishwashers • Human-machine interface • Connected appliances Industrial Controls & Factory Automation • Machine-to-machine • Motor control Products • Industrial networking Kinetis & LPC 32-bit i.MX ARM® Applications 2 ARMPUBLIC® Microcontrollers USE Processors NXP MCUs - Powerhouse Portfolio ARM Expertise Broadest licensee of ARM cores in industry Most scalable portfolio with Expansive Portfolio optimized performance and capabilities Development Tools Best-in-class hardware platforms and software solutions Ecosystem Leadership Industry leading partnerships for innovation and differentiation Experienced global support team -

Schedule 14A Employee Slides Supertex Sunnyvale
UNITED STATES SECURITIES AND EXCHANGE COMMISSION Washington, D.C. 20549 SCHEDULE 14A Proxy Statement Pursuant to Section 14(a) of the Securities Exchange Act of 1934 Filed by the Registrant Filed by a Party other than the Registrant Check the appropriate box: Preliminary Proxy Statement Confidential, for Use of the Commission Only (as permitted by Rule 14a-6(e)(2)) Definitive Proxy Statement Definitive Additional Materials Soliciting Material Pursuant to §240.14a-12 Supertex, Inc. (Name of Registrant as Specified In Its Charter) Microchip Technology Incorporated (Name of Person(s) Filing Proxy Statement, if other than the Registrant) Payment of Filing Fee (Check the appropriate box): No fee required. Fee computed on table below per Exchange Act Rules 14a-6(i)(1) and 0-11. (1) Title of each class of securities to which transaction applies: (2) Aggregate number of securities to which transaction applies: (3) Per unit price or other underlying value of transaction computed pursuant to Exchange Act Rule 0-11 (set forth the amount on which the filing fee is calculated and state how it was determined): (4) Proposed maximum aggregate value of transaction: (5) Total fee paid: Fee paid previously with preliminary materials. Check box if any part of the fee is offset as provided by Exchange Act Rule 0-11(a)(2) and identify the filing for which the offsetting fee was paid previously. Identify the previous filing by registration statement number, or the Form or Schedule and the date of its filing. (1) Amount Previously Paid: (2) Form, Schedule or Registration Statement No.: (3) Filing Party: (4) Date Filed: Filed by Microchip Technology Incorporated Pursuant to Rule 14a-12 of the Securities Exchange Act of 1934 Subject Company: Supertex, Inc. -
FAN53525 3.0A, 2.4Mhz, Digitally Programmable Tinybuck® Regulator
FAN53525 — 3.0 A, 2.4 MHz, June 2014 FAN53525 3.0A, 2.4MHz, Digitally Programmable TinyBuck® Regulator Digitally Programmable TinyBuck Digitally Features Description . Fixed-Frequency Operation: 2.4 MHz The FAN53525 is a step-down switching voltage regulator that delivers a digitally programmable output from an input . Best-in-Class Load Transient voltage supply of 2.5 V to 5.5 V. The output voltage is 2 . Continuous Output Current Capability: 3.0 A programmed through an I C interface capable of operating up to 3.4 MHz. 2.5 V to 5.5 V Input Voltage Range Using a proprietary architecture with synchronous . Digitally Programmable Output Voltage: rectification, the FAN53525 is capable of delivering 3.0 A - 0.600 V to 1.39375 V in 6.25 mV Steps continuous at over 80% efficiency, maintaining that efficiency at load currents as low as 10 mA. The regulator operates at Programmable Slew Rate for Voltage Transitions . a nominal fixed frequency of 2.4 MHz, which reduces the . I2C-Compatible Interface Up to 3.4 Mbps value of the external components to 330 nH for the output inductor and as low as 20 µF for the output capacitor. PFM Mode for High Efficiency in Light Load . Additional output capacitance can be added to improve . Quiescent Current in PFM Mode: 50 µA (Typical) regulation during load transients without affecting stability, allowing inductance up to 1.2 µH to be used. Input Under-Voltage Lockout (UVLO) ® At moderate and light loads, Pulse Frequency Modulation Regulator Thermal Shutdown and Overload Protection . (PFM) is used to operate in Power-Save Mode with a typical . -

An Emerging Architecture in Smart Phones
International Journal of Electronic Engineering and Computer Science Vol. 3, No. 2, 2018, pp. 29-38 http://www.aiscience.org/journal/ijeecs ARM Processor Architecture: An Emerging Architecture in Smart Phones Naseer Ahmad, Muhammad Waqas Boota * Department of Computer Science, Virtual University of Pakistan, Lahore, Pakistan Abstract ARM is a 32-bit RISC processor architecture. It is develop and licenses by British company ARM holdings. ARM holding does not manufacture and sell the CPU devices. ARM holding only licenses the processor architecture to interested parties. There are two main types of licences implementation licenses and architecture licenses. ARM processors have a unique combination of feature such as ARM core is very simple as compare to general purpose processors. ARM chip has several peripheral controller, a digital signal processor and ARM core. ARM processor consumes less power but provide the high performance. Now a day, ARM Cortex series is very popular in Smartphone devices. We will also see the important characteristics of cortex series. We discuss the ARM processor and system on a chip (SOC) which includes the Qualcomm, Snapdragon, nVidia Tegra, and Apple system on chips. In this paper, we discuss the features of ARM processor and Intel atom processor and see which processor is best. Finally, we will discuss the future of ARM processor in Smartphone devices. Keywords RISC, ISA, ARM Core, System on a Chip (SoC) Received: May 6, 2018 / Accepted: June 15, 2018 / Published online: July 26, 2018 @ 2018 The Authors. Published by American Institute of Science. This Open Access article is under the CC BY license. -
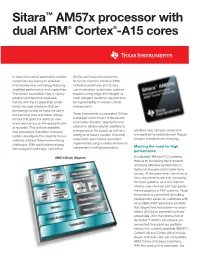
Sitara™ Am57x Processor with Dual ARM® Cortex®-A15 Cores
Sitara™ AM57x processor with dual ARM® Cortex®-A15 cores In today’s industrial automation market, (PLCs) and industrial computers consumers are seeing an evolution to human machine interface (HMI), that requires new technology featuring industrial peripherals and factory amplified performance and capabilities. communication, automation systems The factory automation floor is rapidly require cuttingedge technologies to advancing to become more user meet stringent customer requirements friendly with the incorporation of ele for high reliability in missioncritical ments like user interfaces that are environments. increasingly similar to those we use in our everyday lives and video compe Texas Instruments Incorporated (TI) has tencies that grant the ability to view a strategic commitment to the factory machines running on the opposite side automation industry, ranging from an of factories. This shift necessitates extensive, reliable solution portfolio to solutions very complex, expensive new processors that afford industrial a long product life supply as well as a and resistant to evolution even though system developers the capacity to suc strong localbased support. Industrial industry standards are changing. cessfully address these everevolving automation applications have been challenges. With applications ranging implemented using a variety of external Meeting the need for high from programmable logic controllers components making yesterday’s performance AM57x block diagram In industrial HMI and PLC systems, there is an increasing trend towards achieving x86level performance in fanless enclosures and smaller form factors. At the same time, communica tions requirements are ever increasing for these systems, as is the need for intuitive user interface and highperfor mance graphics in HMI systems. -

SOMNIUM® DRT Benchmarks Whitepaper DRT 4.0 Release : March 2017
SOMNIUM® DRT Benchmarks Whitepaper DRT 4.0 release : March 2017 www.somniumtech.com SOMNIUM® DRT is a complete C/C++ embedded software Microchip SAM examples Atmel START was used to create an "empty" C program including Atmel Software Framework development environment which supports ARM® Cortex® M (ASF) routines to configure the on-chip PLL to highest devices from leading semiconductor vendors. possible frequency on a SAMD21 device (32KByte ROM, Vendor Family Cortex 4KByte RAM). IAR Embedded Workbench uses less memory than vanilla GNU tools from Atmel Studio, DRT Microchip SAM M0+, M3, M4 does even better and uses the smallest amount of ROM. Kinetis M0+, M4 NXP ROM RAM LPC M0, M0+, M3, M4 DRT is smaller DRT is smaller KBytes KBytes (% and bytes) (% and bytes) STMicroelectronics STM32 M0, M0+, M3, M4 DRT 1.5 n/a n/a 8.7 n/a n/a Other software vendors use adjectives. SOMNIUM use Atmel STUDIO 1.8 24.1% 360 8.7 0.0% 0 facts. This whitepaper compares benchmarking results for IAR 1.5 2.4% 36 8.6 -0.4% -32 SOMNIUM DRT against other toolchain products to demonstrate that DRT builds the smallest, fastest most energy efficient code with no source code changes required. NXP Kinetis examples We used NXP's Kinetis SDK v2 (now No defeat devices! Unlike many well known software renamed as MCUXpresso SDK) tools to create an "empty" C vendors, SOMNIUM play fair and do not put “benchmark program (including use of Kinetis SDK v2 routines to enable special” features in our products to change their behavior in the on-chip PLL) for a KL25Z device. -

OMAP 3 Family of Multimedia Applications
OMAP™ 3 family of multimedia applications processors Revolutionizing entertainment and productivity Key features in wireless handheld commumications • Combines mobile entertainment and high-performance productivity applications. Product Bulletin • Integrates the advanced Superscalar ARM Cortex-A8 RISC core, enabling up to The OMAP™ 3 family of multimedia applications processors from Texas Instruments (TI) 3x gain in performance versus ARM11. introduces a new level of performance that enables laptop-like productivity and advanced • Designed in 45-nm (OMAP36x platform) entertainment in multimedia-enabled handsets. OMAP 3 devices support all levels of and 65-nm (OMAP34x platform) CMOS handsets, from the entry-level multimedia-enabled handsets to high-end Mobile Internet process technologies for less power Devices (MIDs). consumption and increased device performance. Entry-level Mid-level High-end • Includes integrated IVA hardware multimedia-enabled multimedia-enabled multimedia-enabled accelerators to enable multi-standard encode handsets handsets handsets decode up to HD resolution. OMAP3410 OMAP3420 OMAP3430/3440 • Available integrated image signal OMAP3610 OMAP3620 OMAP3630/3640 processor (ISP) enables faster, higher quality image capture, lower system cost TI’s OMAP 3 family of applications processors These devices can operate at a higher and lower power consumption. • Provides seamless connectivity to hard integrate the ARM Cortex-A8 superscalar frequency than previous-generation OMAP diskdrive (HDD) devices for mass storage. microprocessor -
Nomadik Application Processor Andrea Gallo Giancarlo Asnaghi ST Is #1 World-Wide Leader in Digital TV and Consumer Audio
Nomadik Application Processor Andrea Gallo Giancarlo Asnaghi ST is #1 world-wide leader in Digital TV and Consumer Audio MP3 Portable Digital Satellite Radio Set Top Box Player Digital Car Radio DVD Player MMDSP+ inside more than 200 million produced chips January 14, 2009 ST leader in mobile phone chips January 14, 2009 Nomadik Nomadik is based on this heritage providing: – Unrivalled multimedia performances – Very low power consumption – Scalable performances January 14, 2009 BestBest ApplicationApplication ProcessorProcessor 20042004 9 Lowest power consumption 9 Scalable performance 9 Video/Audio quality 9 Cost-effective Nominees: Intel XScale PXA260, NeoMagic MiMagic 6, Nvidia MQ-9000, STMicroelectronics Nomadik STn8800, Texas Instruments OMAP 1611 January 14, 2009 Nomadik Nomadik is a family of Application Processors – Distributed processing architecture ARM9 + multiple Smart Accelerators – Support of a wide range of OS and applications – Seamless integration in the OS through standard API drivers and MM framework January 14, 2009 roadmap ... January 14, 2009 Some Nomadik products on the market... January 14, 2009 STn8815 block diagram January 14, 2009 Nomadik : a true real time multiprocessor platform ARM926 SDRAM SRAM General (L1 + L2) Purpose •Unlimited Space (Level 2 •Limited Bandwidth Cache System for Video) DMA Master OS Memory Controller Peripherals multi-layer AHB bus RTOS RTOS Multi-thread (Scheduler FSM) NAND Flash MMDSP+ Video •Unlimited Space MMDSP+ Audio 66 MHz, 16-bit •“No” Bandwidth 133 MHz, 24-bit •Mass storage -

Lpc43s6x Product Data Sheet
LPC43S6x 32-bit ARM Cortex-M4/M0 MCU; up to 1 MB flash and 154 kB SRAM; Ethernet, two High-speed USB, LCD, EMC, AES engine Rev. 1.3 — 13 January 2020 Product data sheet 1. General description The LPC43S6x are ARM Cortex-M4 based microcontrollers for embedded applications which include an ARM Cortex-M0 coprocessor and an ARM Cortex-M0 subsystem for managing peripherals, up to 1 MB of flash and 154 kB of on-chip SRAM, 16 kB of EEPROM memory, a quad SPI Flash Interface (SPIFI), advanced configurable peripherals such as the SCTimer/PWM and the Serial General Purpose I/O (SGPIO) interface, security features with AES engine, two High-speed USB controllers, Ethernet, LCD, an external memory controller, and multiple digital and analog peripherals. The LPC43S6x operate at CPU frequencies of up to 204 MHz. The ARM Cortex-M4 is a 32-bit core that offers system enhancements such as low power consumption, enhanced debug features, and a high level of support block integration. The ARM Cortex-M4 CPU incorporates a 3-stage pipeline, uses a Harvard architecture with separate local instruction and data buses as well as a third bus for peripherals, and includes an internal prefetch unit that supports speculative branching. The ARM Cortex-M4 supports single-cycle digital signal processing and SIMD instructions. A hardware floating-point processor is integrated into the core. The LPC43S6x include an application ARM Cortex-M0 coprocessor and a second ARM Cortex-M0 subsystem for managing the SGPIO and SPI peripherals.The ARM Cortex-M0 coprocessor is an energy-efficient and easy-to-use 32-bit core which is upward code- and tool-compatible with the Cortex-M4 core. -

Mediatek Inc
01 May 2015 Asia Pacific/Taiwan Equity Research Semiconductor Devices MediaTek Inc. (2454.TW / 2454 TT) Rating NEUTRAL* Price (30 Apr 15, NT$) 395.00 RESULTS Target price (NT$) 405.00¹ Upside/downside (%) 2.5 Mkt cap (NT$ mn) 708,117 (US$ 23,121) 2Q lacks growth, but a high bar is set for 2H Enterprise value (NT$ mn) 544,619 ■ 1Q15 results in line with CS, but below street. 1Q15 sales were already Number of shares (mn) 1,792.70 Free float (%) 89.1 reported at NT$47.5 bn, -14.3% QoQ. Smartphone shipments were 85 mn 52-week price range 535.0 - 390.0 (30mn LTE), down from 95-100mn in 4Q14 due to seasonality and emerging ADTO - 6M (US$ mn) 101.0 market weakness. GMs met our 47.3% vs 46-48% guidance and OpM was also *Stock ratings are relative to the coverage universe in each analyst's or each team's respective sector. in line at 16.1% on cost controls. Lower non-op income kept EPS only in line ¹Target price is for 12 months. with our NT$4.62 and below street's NT$4.97. Research Analysts ■ 2Q15 guidance below, inventory elevated. Sales were guided -5% to +3% Randy Abrams, CFA QoQ, below CS/street's +9%/+18% QoQ on 3G price pressure and 4G mix 886 2 2715 6366 [email protected] skewed to the entry level. Margins are in line, with GMs at 45.5-47.5% and Nickie Yue OpM at 12.5-16.5%. Inventory is elevated, at 102 days and guided to stay 886 2 2715 6364 98-110 days in 2Q15, requiring 2H15 acceleration. -

OMAP-L137 C6000 DSP+ARM Processor
Product Sample & Technical Tools & Support & Folder Buy Documents Software Community OMAP-L137 www.ti.com SPRS563F –SEPTEMBER 2008–REVISED FEBRUARY 2013 OMAP-L137 Low-Power Applications Processor Check for Samples: OMAP-L137 1 OMAP-L137 Low-Power Applications Processor 1.1 Features 1234 • Highlights – 8K-Byte RAM (Vector Table) – Dual Core SoC – 64K-Byte ROM • 375/456-MHz ARM926EJ-S™ RISC MPU • C674x Instruction Set Features • 375/456-MHz C674x VLIW DSP – Superset of the C67x+™ and C64x+™ ISAs – TMS320C674x Fixed/Floating-Point VLIW – Up to 3648/2736 C674x MIPS/MFLOPS DSP Core – Byte-Addressable (8-/16-/32-/64-Bit Data) – Enhanced Direct-Memory-Access Controller – 8-Bit Overflow Protection 3 (EDMA3) – Bit-Field Extract, Set, Clear – 128K-Byte RAM Shared Memory – Normalization, Saturation, Bit-Counting – Two External Memory Interfaces – Compact 16-Bit Instructions – Three Configurable 16550 type UART • C674x Two Level Cache Memory Architecture Modules – 32K-Byte L1P Program RAM/Cache – LCD Controller – 32K-Byte L1D Data RAM/Cache – Two Serial Peripheral Interfaces (SPI) – 256K-Byte L2 Unified Mapped RAM/Cache – Multimedia Card (MMC)/Secure Digital (SD) – Flexible RAM/Cache Partition (L1 and L2) – Two Master/Slave Inter-Integrated Circuit • Enhanced Direct-Memory-Access Controller 3 – One Host-Port Interface (HPI) (EDMA3): – USB 1.1 OHCI (Host) With Integrated PHY – 2 Transfer Controllers (USB1) – 32 Independent DMA Channels • Applications – 8 Quick DMA Channels – Industrial Diagnostics – Programmable Transfer Burst Size – Test and measurement -
1. Software Development Tools for ARM Cortex-M Processor Based Devices
1. Software Development Tools for ARM Cortex-M Processor Based Devices Qty : 01 License : Node-Locked Specifications : Sr. Specifications Compliance No. 1 Integrated Development Environment (IDE) with C/C++ Compiler, Linker, Debugger, Run-time libraries, Utilities, CMSIS Tools for ARM Cortex M Series Microcontrollers. 2 Debugger with Simulator : Source level debugger with Single Step, Break Point, JTAG/SWD and ETM Target system support 3 IDE EDITOR with Project Management Support and Dynamic Syntax Checking and Highlighting Syntax. 4 Target File Format : Tool must be capable of generating the Target File Format of executable in BIN or HEX Format. 5 Integrated Analysis Tools must be capable of Analysis of Code and Execution Time, Code and Data Trace. Complete Code Coverage information for program execution with Execution Profiler and Performance Analyzer for analyzing and optimizing your code. 6 Capable of creating the Run -Time Environment for the selected target device. 7 Device Support and Database : Should have Integrated Database to support various devices available in the market. Especially support for ARM Cortex M0/M0+/M1, ARM CORTEX M3/M4/M7, ARM Cortex M23/M33 from various vendors like NXP LPC series, STM32 Series, TI etc. 8 There must be Provision of Incorporating New Cortex -M Series Devises . IDE must be capable to pre-configure the development tools for the selected target device. 9 Software Packs with ready -to -use CMSIS : The tools should provide extensive support for Cortex Microcontroller Software Interface Standard 1/5 (CMSIS) with features of collecting libraries, source modules, configuration and header files and documentation. Generic software pack to support a wide range of devices and applications.