Masterarbeit / Master's Thesis
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
The Solar System What’S in Our Solar System?
The Solar System What’s in Our Solar System? • Our Solar System consists of a central star (the Sun), the eight planets orbiting the sun, several dwarf planets, moons, asteroids, comets, meteors, interplanetary gas, dust, and all the “space” in between them. • Solar System: a star (sun) together with all the objects revolving around it (planets and their moons, asteroids, comets, and so on). What’s in Our Solar System? • The word solar comes from the Latin solaris, meaning “of the sun.” Sol is the Latin word for “sun.” • The eight planets of the Solar System are named for Greek and Roman Gods and Goddesses. Planetary System Planetary System: a planet with its moon(s), • The Earth and moon are a planetary system. • The word planet comes from a Greek word meaning “wandering.” To the ancients, the five visible planets to the naked eye appeared to move, unlike the other fixed stars that were “fixed.” • Orbit: the path followed by a planet, asteroid, or comet around a star, or a moon around a planet. The word comes from the Latin orbita, meaning a “wheel track.” Planets, Dwarf Planets, Moons, Asteroids, and Comets • Planet: a large body, spherical because of its own gravity, orbiting a star and not sharing its orbit with any other large bodies. • Dwarf Planet: a planet-like body that orbits the sun and does not clear its orbital zone of other massive bodies, and is not a moon. • Moon: object revolving around a planet. The word moon is from an ancient German root meaning “moon” or “month.” Planets, Dwarf Planets, Moons, Asteroids, and Comets • Asteroid: a rocky or metallic object a few feet or a few miles in dimeter. -
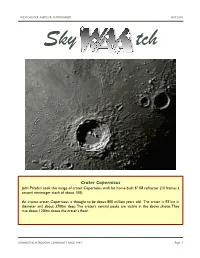
Crater Copernicus John Paladini Took This Image of Crater Copernicus with His Home-Built 6" F/8 Refractor (10 Frames a Second Neximager Stack of About 100)
WESTCHESTER AMATEUR ASTRONOMERS MAY 2010 Sky tch Crater Copernicus John Paladini took this image of crater Copernicus with his home-built 6" f/8 refractor (10 frames a second neximager stack of about 100). An impact crater, Copernicus is thought to be about 800 million years old. The crater is 93 km in diameter and about 3700m deep. The crater’s central peaks are visible in the above photo. They rise about 1200m above the crater’s floor. SERVING THE ASTRONOMY COMMUNITY SINCE 1983 Page 1 WESTCHESTER AMATEUR ASTRONOMERS MAY 2010 Events for May 2010 WAA Lectures the public. The scheduled rain/cloud date is May 15th. “No Place for the Timid: Participants and quests should read our General The Engineering Saves of NASA": Observing Guidelines. Friday May 7th, 8:00pm Miller Lecture Hall, Pace University Renewing Members. Pleasantville, NY Bill Forsyth - Hartsdale Alan Witzgall will be giving a behind the scenes look Donna Cincotta - Yonkers at NASA, featuring the engineering saves and Arumugam Manoharan - Yonkers technical support which make space flight possible. James Peale - Bronxville Alan is a well-known astronomy lecturer and science Paul Alimena - Rye writer; he is active in many metropolitan area astronomy organizations. Free and open to the public. Call: 1-877-456-5778 (toll free) for announcements, weather cancellations, or Upcoming Lectures questions. Also, don’t forget to periodically visit the June's lecture will be a teleconference featuring the WAA website at: senior astronomer from the SETI institute, Dr. Seth http://www.westchesterastronomers.org/. Shostak. It will take place at 7:00 pm on Thursday June 10th. -

ASTRONAUTICS and AERONAUTICS, 1977 a Chronology
NASA SP--4022 ASTRONAUTICS AND AERONAUTICS, 1977 A Chronology Eleanor H. Ritchie ' The NASA History Series Scientific and Technical Information Branch 1986 National Aeronautics and Space Administration Washington, DC Four spacecraft launched by NASA in 1977: left to right, top, ESA’s Geos 1 and NASA’s Heao 1; bottom, ESA’s Isee 2 on NASA’s Isee 1, and Italy’s Wo. (NASA 77-H-157,77-H-56, 77-H-642, 77-H-484) Contents Preface ...................................................... v January ..................................................... 1 February .................................................... 21 March ...................................................... 47 April ....................................................... 61 May ........................................................ 77 June ...................................................... 101 July ....................................................... 127 August .................................................... 143 September ................................................. 165 October ................................................... 185 November ................................................. 201 December .................................................. 217 Appendixes A . Satellites, Space Probes, and Manned Space Flights, 1977 .......237 B .Major NASA Launches, 1977 ............................... 261 C. Manned Space Flights, 1977 ................................ 265 D . NASA Sounding Rocket Launches, 1977 ..................... 267 E . Abbreviations of References -
Astronomy Handbook
ASTRONOMY HANDBOOK 63 Table of Contents Section 1 – The Night Sky Purple Section 2 – The North Polar Sky Green Secton 3 – The Winter Sky Pink Section 4 – The Spring Sky Yellow Section 5 – The Summer Sky Blue Section 6 – The Autumn Sky Orange Section 7 – Other Information Red 64 Section 1 – The Night Sky Table of Contents Page Subject Myths & Legends included? 2 Teaching Astronomy - 4 A Little History - 6 The Universe & Milky Way Estonian 9 The Stars & Our Sun Greek, Native American, Scandinavian 16 The Planets Greek, Native American 25 The Moon Native American, Chinese 36 Asteroids, Comets, Meteoroids Native American 39 Greek & Roman Gods - 40 Constellations: An Intro Native American 65 Teaching Astronomy Most schools that come to TOS like to take astronomy. It’s a great opportunity for the kids to sit quietly, look at stars and planets that they may not be able to see in a town or city, and listen to myths and legends about the night sky. This information offers a good foundation to astronomy. Please read it and absorb as much as you can before you arrive. During training we will concentrate on learning constellations and the stories associated with them. Astronomy lasts an hour-and-a-half. We will usually start off with a few games (which we will also show you during training) to burn off some of the kids’ energy, and to wait for it to get dark. Once the stars come out, you will gather your team and find somewhere around camp to look at the night sky. -

Bulfinch's Mythology
Bulfinch's Mythology Thomas Bulfinch Bulfinch's Mythology Table of Contents Bulfinch's Mythology..........................................................................................................................................1 Thomas Bulfinch......................................................................................................................................1 PUBLISHERS' PREFACE......................................................................................................................3 AUTHOR'S PREFACE...........................................................................................................................4 STORIES OF GODS AND HEROES..................................................................................................................7 CHAPTER I. INTRODUCTION.............................................................................................................7 CHAPTER II. PROMETHEUS AND PANDORA...............................................................................13 CHAPTER III. APOLLO AND DAPHNEPYRAMUS AND THISBE CEPHALUS AND PROCRIS7 CHAPTER IV. JUNO AND HER RIVALS, IO AND CALLISTODIANA AND ACTAEONLATONA2 AND THE RUSTICS CHAPTER V. PHAETON.....................................................................................................................27 CHAPTER VI. MIDASBAUCIS AND PHILEMON........................................................................31 CHAPTER VII. PROSERPINEGLAUCUS AND SCYLLA............................................................34 -

Planet Watch Constellation Watch the Night Sky Above
THE NIGHT SKY ABOVE YORK FOR MARCH & APRIL 2014 �is chart is oriented for 9pm March 17th, 8pm March 31st, 7pm April 14th, but can be used at any time. To use the chart, hold it up to the sky. Turn the chart so that the direction you are looking is at the bottom of the chart. If you are looking to the south then have the ‘South Horizon’ at the bottom edge. As the Earth turns the stars appear to rotate anti-clockwise around the North Celestial Pole, marked by the star Polaris. Stars rise in the east and set in the west just like the Sun. �e sky makes a small westward shift every night as we orbit the Sun. be seen to be distinctly different colours. PLANET WATCH Rigel is a hot blue supergiant star and Jupiter is the brightest object (besides the Betelgeuse is a huge cool red giant, 8 times moon) in the evening sky in March and April. larger than Rigel. Although they appear to be It is the largest planet in the Solar System. the same brightness, Rigel is further away With a small telescope you can see the (772 light years compared to 644 light years), four Galilean moons of Jupiter. Io, Europa, meaning it is naturally brighter. �e sword Ganymede and Callisto were discovered by of Orion can be seen as three stars hanging Galileo when used his telescope to look at diagonally down from his belt. �e second the night sky. �ey are some interesting star down is not a star at all! It is a large places too. -

The Age of Chivalry
1 A free download from http://manybooks.net The Age of Chivalry CHAPTER I<p> CHAPTER I CHAPTER II<p> CHAPTER II CHAPTER III<p> CHAPTER III CHAPTER IV<p> CHAPTER IV CHAPTER V<p> CHAPTER V CHAPTER VI<p> CHAPTER VI CHAPTER VII<p> CHAPTER VII CHAPTER VIII<p> CHAPTER VIII CHAPTER IX<p> CHAPTER IX CHAPTER X<p> CHAPTER X CHAPTER XI<p> CHAPTER XI CHAPTER XII<p> CHAPTER XII CHAPTER XIII<p> CHAPTER XIII CHAPTER XIV<p> CHAPTER XIV The Age of Chivalry 2 CHAPTER XV<p> CHAPTER XV CHAPTER XVI<p> CHAPTER XVI CHAPTER XVII<p> CHAPTER XVII CHAPTER XVIII<p> CHAPTER XVIII CHAPTER XIX<p> CHAPTER XIX CHAPTER XX<p> CHAPTER XX CHAPTER XXI<p> CHAPTER XXI CHAPTER XXII<p> CHAPTER XXII CHAPTER XXIII<p> CHAPTER XXIII CHAPTER I<p> CHAPTER I CHAPTER II<p> CHAPTER II CHAPTER III<p> CHAPTER III CHAPTER IV<p> CHAPTER IV CHAPTER V<p> CHAPTER V CHAPTER VI<p> CHAPTER VI CHAPTER VII<p> CHAPTER VII CHAPTER VIII<p> CHAPTER VIII CHAPTER IX<p> CHAPTER IX CHAPTER X<p> CHAPTER X CHAPTER XI<p> CHAPTER XI CHAPTER XII<p> CHAPTER XII CHAPTER XIII<p> CHAPTER XIII Information about Project Gutenberg The Legal Small Print The Age of Chivalry The Project Gutenberg EBook of The Age of Chivalry, by Thomas Bulfinch (#2 in our series by Thomas The Age of Chivalry 3 Bulfinch) Copyright laws are changing all over the world. Be sure to check the copyright laws for your country before downloading or redistributing this or any other Project Gutenberg eBook. -

Ttu Mac001 000056.Pdf (14.29Mb)
POETICAL WORKS OF MATTHEW ARNOLD POETICAL WORKS OF MATTHEW ARNOLD 3Lontion MACMILLAN AND CO. AND NEW YORK I 890 All rights reserved CONTENTS EARLY POEMS SONNETS- PAGE QUIET WORK ..... I To A FRIEND ..... 2 SHAKESPEARE ..... 2 WRITTEN IN EMERSON'S ESSAYS 3 WRITTEN IN BUTLER'S SERMONS 4 To THE DUKE OF WELLINGTON 4 IN HARMONY WITH NATURE . 5 To GEORGE CRUIKSHANK 6 To A REPUBLICAN FRIEND, 1848 6 CONTINUED ..... 7 RELIGIOUS ISOLATION .... 8 MYCERINUS . , , , ' 8 THE CHURCH OF BROU— I. THE CASTLE .... 13 II. THE CHURCH .... 17 III. THE TOMB .... 18 A MODERN SAPPHO .... 20 REQUIESCAT ..... 21 YOUTH AND CALM ..... 22 viii CONTENTS PAGE A ]\IEMORY-PICTURE .... 23 A DREAM ...... 25 THE NEW SIRENS ..... 26 THE VOICE ...... 36 YOUTH'S AGITATIONS . 37 THE WORLD'S TRIUMPHS . = . 38 STAGIRIUS ...... 38 HUMAN LIFE ..... 40 To A GIPSY CHILD BY THE SEA-SHORE . 41 A QUESTION ..... 44 IN UTRUMQUE PARATUS .... 45 THE WORLD AND THE QUIETIST . • . 46 HORATIAN ECHO ..,,,., 47 THE SECOND BEST ...... 49 CONSOLATION ..... 50 RESIGNATION ...... 52 NARRATIVE POEMS SOHRAB AND RUSTUM &5 THE SICK KING IN BOKHARA 92 BALDER DEAD— 1. SENDING lOI 2. JOURNEY TO THE DEAD III 3. FUNERAL 121 TRISTRAM AND ISEULT— 1. TRISTRAM • 138 2. ISEULT OF IRELAND • 150 3. ISEULT OF BRITTANY • 158 CONTENTS IX PAGE SAINT BRANDAN 165 THE NECKAN 167 THE FORSAKEN MERMAN 170 SONNETS AUSTERITY OF POETRY • 177 A PICTURE AT NEWSTEAD 177 RACHEL : i, 11, in • 178 WORLDLY PLACE 180 EAST LONDON 180 WEST LONDON 181 EAST AND WEST 181 THE BETTER PART 182 THE DIVINITY 183 IMMORTALITY 183 THE GOOD SHEPHERD WITH THE KID 184 MONICA'S LAST PRAYER 184 LYRIC POEMS SWITZERLAND— 1. -

Our First Quarter Century of Achievement ... Just the Beginning I
NASA Press Kit National Aeronautics and 251hAnniversary October 1983 Space Administration 1958-1983 >\ Our First Quarter Century of Achievement ... Just the Beginning i RELEASE ND: 83-132 September 1983 NOTE TO EDITORS : NASA is observing its 25th anniversary. The space agency opened for business on Oct. 1, 1958. The information attached sumnarizes what has been achieved in these 25 years. It was prepared as an aid to broadcasters, writers and editors who need historical, statistical and chronological material. Those needing further information may call or write: NASA Headquarters, Code LFD-10, News and Information Branch, Washington, D. C. 20546; 202/755-8370. Photographs to illustrate any of this material may be obtained by calling or writing: NASA Headquarters, Code LFD-10, Photo and Motion Pictures, Washington, D. C. 20546; 202/755-8366. bQy#qt&*&Mary G. itzpatrick Acting Chief, News and Information Branch Public Affairs Division Cover Art Top row, left to right: ffComnandDestruct Center," 1967, Artist Paul Calle, left; ?'View from Mimas," 1981, features on a Saturnian satellite, by Artist Ron Miller, center; ftP1umes,*tSTS- 4 launch, Artist Chet Jezierski,right; aeronautical research mural, Artist Bob McCall, 1977, on display at the Visitors Center at Dryden Flight Research Facility, Edwards, Calif. iii OUR FIRST QUARTER CENTER OF ACHIEVEMENT A-1 -3 SPACE FLIGHT B-1 - 19 SPACE SCIENCE c-1 - 20 SPACE APPLICATIQNS D-1 - 12 AERONAUTICS E-1 - 10 TRACKING AND DATA ACQUISITION F-1 - 5 INTERNATIONAL PROGRAMS G-1 - 5 TECHNOLOGY UTILIZATION H-1 - 5 NASA INSTALLATIONS 1-1 - 9 NASA LAUNCH RECORD J-1 - 49 ASTRONAUTS K-1 - 13 FINE ARTS PRQGRAM L-1 - 7 S IGN I F ICANT QUOTAT IONS frl-1 - 4 NASA ADvIINISTRATORS N-1 - 7 SELECTED NASA PHOTOGRAPHS 0-1 - 12 National Aeronautics and Space Administration Washington, D.C. -

Bulfinch's Mythology the Age of Fable by Thomas Bulfinch
1 BULFINCH'S MYTHOLOGY THE AGE OF FABLE BY THOMAS BULFINCH Table of Contents PUBLISHERS' PREFACE ........................................................................................................................... 3 AUTHOR'S PREFACE ................................................................................................................................. 4 INTRODUCTION ........................................................................................................................................ 7 ROMAN DIVINITIES ............................................................................................................................ 16 PROMETHEUS AND PANDORA ............................................................................................................ 18 APOLLO AND DAPHNE--PYRAMUS AND THISBE CEPHALUS AND PROCRIS ............................ 24 JUNO AND HER RIVALS, IO AND CALLISTO--DIANA AND ACTAEON--LATONA AND THE RUSTICS .................................................................................................................................................... 32 PHAETON .................................................................................................................................................. 41 MIDAS--BAUCIS AND PHILEMON ....................................................................................................... 48 PROSERPINE--GLAUCUS AND SCYLLA ............................................................................................. 53 PYGMALION--DRYOPE-VENUS -
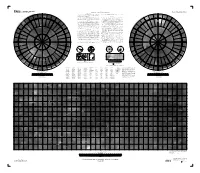
CONTROLLED PHOTOMOSAIC MAP of CALLISTO for Sale by U.S
U.S. DEPARTMENT OF THE INTERIOR Prepared for the GEOLOGIC INVESTIGATIONS SERIES I–2770 U.S. GEOLOGICAL SURVEY NATIONAL AERONAUTICS AND SPACE ADMINISTRATION ATLAS OF JOVIAN SATELLITES: CALLISTO 180° 0° 55° NOTES ON BASE Jc 15M CMN: Abbreviation for Jupiter, Callisto (satellite): 1:15,000,000 series, controlled mosaic –55° This sheet is one in a series of maps of the Galilean satellites of Jupiter at a nominal scale of (CM), nomenclature (N) (Greeley and Batson, 1990). 1:15,000,000. This series is based on data from the Galileo Orbiter Solid-State Imaging (SSI) cam- era and the cameras of the Voyager 1 and 2 spacecraft. 2 REFERENCES 3 0° 10 PROJECTION 0° Lofn 30 15 ° Batson, R.M., 1987, Digital cartography of the planets—New methods, its status, and its future: 3 ° 60° Mercator and Polar Stereographic projections used for this map of Callisto are based on a sphere –60° having a radius of 2,409.3 km. The scale is 1:8,388,000 at ±56° latitude for both projections. Longi- Photogrammetric Engineering and Remote Sensing, v. 53, no. 9, p. 1211–1218. tude increases to the west in accordance with the International Astronomical Union (1971) (Seidel- Becker, T.L., Archinal, B., Colvin, T.R., Davies, M.E., Gitlin, A., Kirk, R.L., and Weller, L., 2001, mann and others, 2002). Final digital global maps of Ganymede, Europa, and Callisto, in Lunar and Planetary Science Conference XXXII: Houston, Lunar and Planetary Institute, abs. no. 2009 [CD-ROM]. Nyctimus . Hijsi CONTROL Becker, T.L., Rosanova, T., Cook, D., Davies, M.E., Colvin, T.R., Acton, C., Bachman, N., Kirk, The geometric control network was computed at the RAND Corporation using RAND’s most R.L., and Gaddis, L.R., 1999, Progress in improvement of geodetic control and production of Heimdall . -

On TRACKS-Astronomy
Vol. 20, No. 1 Kansas Wildlife & Parks Winter, 2010 ASTRONOMY and the sky at night INSIDE... Cosmic Address 2 Measuring Vast Distances 4 Don’t Miss The Solar System 5 O ur Next Additional Solar System Ideas 7 I ssue: The Moon 8 Circumpolar Constellations 10 Why the North Star Does Not Move 12 Climate Big Dipper Star Clock 13 Change Light Pollution 15 Ways to Combat Light Pollution 17 The ABC’s of Stargazing 18 How Children View the Universe 19 “It is easy to forget that above us on every clear night, stars and planets grace the night sky.” --NPS Exploring the Night It is easy to forget this. Unfortunately, 85% of people in the U.S. can no longer see the Milky Way due to light pollution. Our understanding of our Earth begins with a clear understnding of our place in the Solar System and just what makes us so special. This issue of ON TRACKS will focus on the night sky, the solar system, constellations, and light pollution. Cosmic Addres s We should all know our address by the time we go to school. For those of us in the United States, our address consists of our state, city, and street number of our house. But, what would our address be on a cosmic scale? Starting from small to big or going from known to unknown our address in the universe would look something like this: Billy Smith 11504 Orchard Rd Junction City, KS USA Planet Earth Solar System Milky Way Galaxy Local Group Virgo Supercluster Observable Universe Let’s start with the fifth line of our address: PLANET EARTH.