The Limits of Semiconductor Technology and Oncoming Challenges in Computer Microarchitectures and Architectures
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Nova College-Wide Course Content Summary Ite 170 - Multimedia Software (3 Cr.)
Revised 8/2012 NOVA COLLEGE-WIDE COURSE CONTENT SUMMARY ITE 170 - MULTIMEDIA SOFTWARE (3 CR.) Course Description Explores technical fundamentals of creating multimedia projects with related hardware and software. Students will learn to manage resources required for multimedia production and evaluation and techniques for selection of graphics and multimedia software. Lecture 3 hours per week. General Purpose In this course students will learn the concepts, design and implementation of multimedia for the web. Students will create professional websites which incorporate images, sound, video and animation. The materials created will correspond to standards for Web accessibility and copyright issues. Course Prerequisites/Corequisites Prerequisite: ITE 115 Course Objectives Upon completion of this course, the student will be able to: a) Plan and organize a multimedia web site b) Understand the design concepts for creating a multimedia website c) Use a web authoring tool to create a multimedia web site d) Understand the design concepts related to creating and using graphics for the web e) Use graphics software to create and edit images for the web f) Understand the design concepts related to creating and using animation, audio and video for the web g) Use animation software to create and edit animations for the web h) Use software tools to publish and maintain a multimedia web site Major Topics to be Included Plan and organize a multimedia web site User characteristics and their effect upon design considerations Principles of good design -

Efficient Checker Processor Design
Efficient Checker Processor Design Saugata Chatterjee, Chris Weaver, and Todd Austin Electrical Engineering and Computer Science Department University of Michigan {saugatac,chriswea,austin}@eecs.umich.edu Abstract system works to increase test space coverage by proving a design is correct, either through model equivalence or assertion. The approach is significantly more efficient The design and implementation of a modern micro- than simulation-based testing as a single proof can ver- processor creates many reliability challenges. Design- ify correctness over large portions of a design’s state ers must verify the correctness of large complex systems space. However, complex modern pipelines with impre- and construct implementations that work reliably in var- cise state management, out-of-order execution, and ied (and occasionally adverse) operating conditions. In aggressive speculation are too stateful or incomprehen- our previous work, we proposed a solution to these sible to permit complete formal verification. problems by adding a simple, easily verifiable checker To further complicate verification, new reliability processor at pipeline retirement. Performance analyses challenges are materializing in deep submicron fabrica- of our initial design were promising, overall slowdowns tion technologies (i.e. process technologies with mini- due to checker processor hazards were less than 3%. mum feature sizes below 0.25um). Finer feature sizes However, slowdowns for some outlier programs were are generally characterized by increased complexity, larger. more exposure to noise-related faults, and interference In this paper, we examine closely the operation of the from single event radiation (SER). It appears the current checker processor. We identify the specific reasons why advances in verification (e.g., formal verification, the initial design works well for some programs, but model-based test generation) are not keeping pace with slows others. -

Inside Intel® Core™ Microarchitecture Setting New Standards for Energy-Efficient Performance
White Paper Inside Intel® Core™ Microarchitecture Setting New Standards for Energy-Efficient Performance Ofri Wechsler Intel Fellow, Mobility Group Director, Mobility Microprocessor Architecture Intel Corporation White Paper Inside Intel®Core™ Microarchitecture Introduction Introduction 2 The Intel® Core™ microarchitecture is a new foundation for Intel®Core™ Microarchitecture Design Goals 3 Intel® architecture-based desktop, mobile, and mainstream server multi-core processors. This state-of-the-art multi-core optimized Delivering Energy-Efficient Performance 4 and power-efficient microarchitecture is designed to deliver Intel®Core™ Microarchitecture Innovations 5 increased performance and performance-per-watt—thus increasing Intel® Wide Dynamic Execution 6 overall energy efficiency. This new microarchitecture extends the energy efficient philosophy first delivered in Intel's mobile Intel® Intelligent Power Capability 8 microarchitecture found in the Intel® Pentium® M processor, and Intel® Advanced Smart Cache 8 greatly enhances it with many new and leading edge microar- Intel® Smart Memory Access 9 chitectural innovations as well as existing Intel NetBurst® microarchitecture features. What’s more, it incorporates many Intel® Advanced Digital Media Boost 10 new and significant innovations designed to optimize the Intel®Core™ Microarchitecture and Software 11 power, performance, and scalability of multi-core processors. Summary 12 The Intel Core microarchitecture shows Intel’s continued Learn More 12 innovation by delivering both greater energy efficiency Author Biographies 12 and compute capability required for the new workloads and usage models now making their way across computing. With its higher performance and low power, the new Intel Core microarchitecture will be the basis for many new solutions and form factors. In the home, these include higher performing, ultra-quiet, sleek and low-power computer designs, and new advances in more sophisticated, user-friendly entertainment systems. -

Image Compression, Comparison Between Discrete Cosine Transform and Fast Fourier Transform and the Problems Associated with DCT
Image Compression, Comparison between Discrete Cosine Transform and Fast Fourier Transform and the problems associated with DCT Imdad Ali Ismaili 1, Sander Ali Khowaja 2, Waseem Javed Soomro 3 1Institute of Information and Communication Technology, University of Sindh, Jamshoro, Sindh, Pakistan 2Institute of Information and Communication Technology, University of Sindh, Jamshoro, Sindh, Pakistan Abstract - The research article focuses on the Image much higher than the calculations mentioned above; this Compression techniques such as. Discrete Cosine Transform increases the bandwidth requirement of the channel which is (DCT) and Fast Fourier Transform (FFT). These techniques very costly. This is the challenging part for the researchers to are chosen because of their vast use in image processing field, transmit theses digital signals through limited bandwidth JPEG (Joint Photographic Experts Group) is one of the communication channel, most of the times the way is found to examples of compression technique which uses DCT. The overcome this obstacle but sometimes it is impossible to send Research compares the two compression techniques based on these digital signals in its raw form. Though there has been a DCT and FFT and compare their results using MATLAB revolution in the increased capacity and decreased cost of software, Graphical User Interface (GUI). These results are storage over the past years but the requirement of data storage based on two compression techniques with different rates of and data processing applications is growing explosively to out compression i.e. Compression rates are 90%, 60%, 30% and space this achievement.[8] 5%. The technique allows compressing any picture format to JPG format. -

1 Introduction
Cambridge University Press 978-0-521-76992-1 - Microprocessor Architecture: From Simple Pipelines to Chip Multiprocessors Jean-Loup Baer Excerpt More information 1 Introduction Modern computer systems built from the most sophisticated microprocessors and extensive memory hierarchies achieve their high performance through a combina- tion of dramatic improvements in technology and advances in computer architec- ture. Advances in technology have resulted in exponential growth rates in raw speed (i.e., clock frequency) and in the amount of logic (number of transistors) that can be put on a chip. Computer architects have exploited these factors in order to further enhance performance using architectural techniques, which are the main subject of this book. Microprocessors are over 30 years old: the Intel 4004 was introduced in 1971. The functionality of the 4004 compared to that of the mainframes of that period (for example, the IBM System/370) was minuscule. Today, just over thirty years later, workstations powered by engines such as (in alphabetical order and without specific processor numbers) the AMD Athlon, IBM PowerPC, Intel Pentium, and Sun UltraSPARC can rival or surpass in both performance and functionality the few remaining mainframes and at a much lower cost. Servers and supercomputers are more often than not made up of collections of microprocessor systems. It would be wrong to assume, though, that the three tenets that computer archi- tects have followed, namely pipelining, parallelism, and the principle of locality, were discovered with the birth of microprocessors. They were all at the basis of the design of previous (super)computers. The advances in technology made their implementa- tions more practical and spurred further refinements. -

Instruction Latencies and Throughput for AMD and Intel X86 Processors
Instruction latencies and throughput for AMD and Intel x86 processors Torbj¨ornGranlund 2019-08-02 09:05Z Copyright Torbj¨ornGranlund 2005{2019. Verbatim copying and distribution of this entire article is permitted in any medium, provided this notice is preserved. This report is work-in-progress. A newer version might be available here: https://gmplib.org/~tege/x86-timing.pdf In this short report we present latency and throughput data for various x86 processors. We only present data on integer operations. The data on integer MMX and SSE2 instructions is currently limited. We might present more complete data in the future, if there is enough interest. There are several reasons for presenting this report: 1. Intel's published data were in the past incomplete and full of errors. 2. Intel did not publish any data for 64-bit operations. 3. To allow straightforward comparison of an important aspect of AMD and Intel pipelines. The here presented data is the result of extensive timing tests. While we have made an effort to make sure the data is accurate, the reader is cautioned that some errors might have crept in. 1 Nomenclature and notation LNN means latency for NN-bit operation.TNN means throughput for NN-bit operation. The term throughput is used to mean number of instructions per cycle of this type that can be sustained. That implies that more throughput is better, which is consistent with how most people understand the term. Intel use that same term in the exact opposite meaning in their manuals. The notation "P6 0-E", "P4 F0", etc, are used to save table header space. -

The Intro to GPGPU CPU Vs
12/12/11! The Intro to GPGPU . Dr. Chokchai (Box) Leangsuksun, PhD! Louisiana Tech University. Ruston, LA! ! CPU vs. GPU • CPU – Fast caches – Branching adaptability – High performance • GPU – Multiple ALUs – Fast onboard memory – High throughput on parallel tasks • Executes program on each fragment/vertex • CPUs are great for task parallelism • GPUs are great for data parallelism Supercomputing 20082 Education Program 1! 12/12/11! CPU vs. GPU - Hardware • More transistors devoted to data processing CUDA programming guide 3.1 3 CPU vs. GPU – Computation Power CUDA programming guide 3.1! 2! 12/12/11! CPU vs. GPU – Memory Bandwidth CUDA programming guide 3.1! What is GPGPU ? • General Purpose computation using GPU in applications other than 3D graphics – GPU accelerates critical path of application • Data parallel algorithms leverage GPU attributes – Large data arrays, streaming throughput – Fine-grain SIMD parallelism – Low-latency floating point (FP) computation © David Kirk/NVIDIA and Wen-mei W. Hwu, 2007! ECE 498AL, University of Illinois, Urbana-Champaign! 3! 12/12/11! Why is GPGPU? • Large number of cores – – 100-1000 cores in a single card • Low cost – less than $100-$1500 • Green computing – Low power consumption – 135 watts/card – 135 w vs 30000 w (300 watts * 100) • 1 card can perform > 100 desktops 12/14/09!– $750 vs 50000 ($500 * 100) 7 Two major players 4! 12/12/11! Parallel Computing on a GPU • NVIDIA GPU Computing Architecture – Via a HW device interface – In laptops, desktops, workstations, servers • Tesla T10 1070 from 1-4 TFLOPS • AMD/ATI 5970 x2 3200 cores • NVIDIA Tegra is an all-in-one (system-on-a-chip) ATI 4850! processor architecture derived from the ARM family • GPU parallelism is better than Moore’s law, more doubling every year • GPGPU is a GPU that allows user to process both graphics and non-graphics applications. -

POWER-AWARE MICROARCHITECTURE: Design and Modeling Challenges for Next-Generation Microprocessors
POWER-AWARE MICROARCHITECTURE: Design and Modeling Challenges for Next-Generation Microprocessors THE ABILITY TO ESTIMATE POWER CONSUMPTION DURING EARLY-STAGE DEFINITION AND TRADE-OFF STUDIES IS A KEY NEW METHODOLOGY ENHANCEMENT. OPPORTUNITIES FOR SAVING POWER CAN BE EXPOSED VIA MICROARCHITECTURE-LEVEL MODELING, PARTICULARLY THROUGH CLOCK- GATING AND DYNAMIC ADAPTATION. Power dissipation limits have Thus far, most of the work done in the area David M. Brooks emerged as a major constraint in the design of high-level power estimation has been focused of microprocessors. At the low end of the per- at the register-transfer-level (RTL) description Pradip Bose formance spectrum, namely in the world of in the processor design flow. Only recently have handheld and portable devices or systems, we seen a surge of interest in estimating power Stanley E. Schuster power has always dominated over perfor- at the microarchitecture definition stage, and mance (execution time) as the primary design specific work on power-efficient microarchi- Hans Jacobson issue. Battery life and system cost constraints tecture design has been reported.2-8 drive the design team to consider power over Here, we describe the approach of using Prabhakar N. Kudva performance in such a scenario. energy-enabled performance simulators in Increasingly, however, power is also a key early design. We examine some of the emerg- Alper Buyuktosunoglu design issue in the workstation and server mar- ing paradigms in processor design and com- kets (see Gowan et al.)1 In this high-end arena ment on their inherent power-performance John-David Wellman the increasing microarchitectural complexities, characteristics. clock frequencies, and die sizes push the chip- Victor Zyuban level—and hence the system-level—power Power-performance efficiency consumption to such levels that traditionally See the “Power-performance fundamentals” Manish Gupta air-cooled multiprocessor server boxes may box. -

45-Year CPU Evolution: One Law and Two Equations
45-year CPU evolution: one law and two equations Daniel Etiemble LRI-CNRS University Paris Sud Orsay, France [email protected] Abstract— Moore’s law and two equations allow to explain the a) IC is the instruction count. main trends of CPU evolution since MOS technologies have been b) CPI is the clock cycles per instruction and IPC = 1/CPI is the used to implement microprocessors. Instruction count per clock cycle. c) Tc is the clock cycle time and F=1/Tc is the clock frequency. Keywords—Moore’s law, execution time, CM0S power dissipation. The Power dissipation of CMOS circuits is the second I. INTRODUCTION equation (2). CMOS power dissipation is decomposed into static and dynamic powers. For dynamic power, Vdd is the power A new era started when MOS technologies were used to supply, F is the clock frequency, ΣCi is the sum of gate and build microprocessors. After pMOS (Intel 4004 in 1971) and interconnection capacitances and α is the average percentage of nMOS (Intel 8080 in 1974), CMOS became quickly the leading switching capacitances: α is the activity factor of the overall technology, used by Intel since 1985 with 80386 CPU. circuit MOS technologies obey an empirical law, stated in 1965 and 2 Pd = Pdstatic + α x ΣCi x Vdd x F (2) known as Moore’s law: the number of transistors integrated on a chip doubles every N months. Fig. 1 presents the evolution for II. CONSEQUENCES OF MOORE LAW DRAM memories, processors (MPU) and three types of read- only memories [1]. The growth rate decreases with years, from A. -

System-On-A-Chip (Soc) & ARM Architecture
System-on-a-Chip (SoC) & ARM Architecture EE2222 Computer Interfacing and Microprocessors Partially based on System-on-Chip Design by Hao Zheng 2020 EE2222 1 Overview • A system-on-a-chip (SoC): • a computing system on a single silicon substrate that integrates both hardware and software. • Hardware packages all necessary electronics for a particular application. • which implemented by SW running on HW. • Aim for low power and low cost. • Also more reliable than multi-component systems. 2020 EE2222 2 Driven by semiconductor advances 2020 EE2222 3 Basic SoC Model 2020 EE2222 4 2020 EE2222 5 SoC vs Processors System on a chip Processors on a chip processor multiple, simple, heterogeneous few, complex, homogeneous cache one level, small 2-3 levels, extensive memory embedded, on chip very large, off chip functionality special purpose general purpose interconnect wide, high bandwidth often through cache power, cost both low both high operation largely stand-alone need other chips 2020 EE2222 6 Embedded Systems • 98% processors sold annually are used in embedded applications. 2020 EE2222 7 Embedded Systems: Design Challenges • Power/energy efficient: • mobile & battery powered • Highly reliable: • Extreme environment (e.g. temperature) • Real-time operations: • predictable performance • Highly complex • A modern automobile with 55 electronic control units • Tightly coupled Software & Hardware • Rapid development at low price 2020 EE2222 8 EECS222A: SoC Description and Modeling Lecture 1 Design Complexity Challenge Design• Productivity Complexity -
Three-Dimensional Integrated Circuit Design: EDA, Design And
Integrated Circuits and Systems Series Editor Anantha Chandrakasan, Massachusetts Institute of Technology Cambridge, Massachusetts For other titles published in this series, go to http://www.springer.com/series/7236 Yuan Xie · Jason Cong · Sachin Sapatnekar Editors Three-Dimensional Integrated Circuit Design EDA, Design and Microarchitectures 123 Editors Yuan Xie Jason Cong Department of Computer Science and Department of Computer Science Engineering University of California, Los Angeles Pennsylvania State University [email protected] [email protected] Sachin Sapatnekar Department of Electrical and Computer Engineering University of Minnesota [email protected] ISBN 978-1-4419-0783-7 e-ISBN 978-1-4419-0784-4 DOI 10.1007/978-1-4419-0784-4 Springer New York Dordrecht Heidelberg London Library of Congress Control Number: 2009939282 © Springer Science+Business Media, LLC 2010 All rights reserved. This work may not be translated or copied in whole or in part without the written permission of the publisher (Springer Science+Business Media, LLC, 233 Spring Street, New York, NY 10013, USA), except for brief excerpts in connection with reviews or scholarly analysis. Use in connection with any form of information storage and retrieval, electronic adaptation, computer software, or by similar or dissimilar methodology now known or hereafter developed is forbidden. The use in this publication of trade names, trademarks, service marks, and similar terms, even if they are not identified as such, is not to be taken as an expression of opinion as to whether or not they are subject to proprietary rights. Printed on acid-free paper Springer is part of Springer Science+Business Media (www.springer.com) Foreword We live in a time of great change. -
Soft Machines Targets Ipcbottleneck
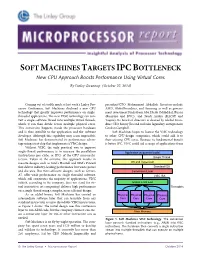
SOFT MACHINES TARGETS IPC BOTTLENECK New CPU Approach Boosts Performance Using Virtual Cores By Linley Gwennap (October 27, 2014) ................................................................................................................... Coming out of stealth mode at last week’s Linley Pro- president/CTO Mohammad Abdallah. Investors include cessor Conference, Soft Machines disclosed a new CPU AMD, GlobalFoundries, and Samsung as well as govern- technology that greatly improves performance on single- ment investment funds from Abu Dhabi (Mubdala), Russia threaded applications. The new VISC technology can con- (Rusnano and RVC), and Saudi Arabia (KACST and vert a single software thread into multiple virtual threads, Taqnia). Its board of directors is chaired by Global Foun- which it can then divide across multiple physical cores. dries CEO Sanjay Jha and includes legendary entrepreneur This conversion happens inside the processor hardware Gordon Campbell. and is thus invisible to the application and the software Soft Machines hopes to license the VISC technology developer. Although this capability may seem impossible, to other CPU-design companies, which could add it to Soft Machines has demonstrated its performance advan- their existing CPU cores. Because its fundamental benefit tage using a test chip that implements a VISC design. is better IPC, VISC could aid a range of applications from Without VISC, the only practical way to improve single-thread performance is to increase the parallelism Application (sequential code) (instructions per cycle, or IPC) of the CPU microarchi- Single Thread tecture. Taken to the extreme, this approach results in massive designs such as Intel’s Haswell and IBM’s Power8 OS and Hypervisor that deliver industry-leading performance but waste power Standard ISA and die area.