Project Tagboard/Senior Bowl Overview
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Intellipedia-Mothership.Pdf
This document is made available through the declassification efforts and research of John Greenewald, Jr., creator of: The Black Vault The Black Vault is the largest online Freedom of Information Act (FOIA) document clearinghouse in the world. The research efforts here are responsible for the declassification of MILLIONS of pages released by the U.S. Government & Military. Discover the Truth at: http://www.theblackvault.com Mother ship - lntellipedia Doc,lD: 6637158 (U) Mother ship UNCLASSIFIED From Intellipedia I (b) (3) - P . L . 86- 36 1 You have new messages (last change). See the Wikipe~ia article A mother ship is a vessel or aircraft that carries a smaller vessel or Mother ship · aircraft that operates independently from it. Examples include bombers converted to carry experimental aircraft to altitudes where they can conduct their research (such as the B-52 carrying the X-15), or ships that carry small submarines to an area of ocean to be explored (such as the Atlantis II carrying the Alvin). The mothership may also recover the smaller craft, or may go its own way after releasing it. I Contents • 1 Usage I • 2 In science fiction and UFOs • 3 See also I L.•___ 4 References ___; Usage The term mother ship dates back to the nineteenth century whaling trade when small, fast ships were used to chase and kill whales. The dead meat from several boats was then brought back to the larger, slower ship for processing and storage until the return to land. This model enabled a far more efficient method of whaling. -

The Coastwatcher Publication of the Thames River Composite Squadron Connecticut Wing Civil Air Patrol
Missions for America Weather stripping will be installed as needed on Semper vigilans! doors. Semper volans! A security light will be installed on the exterior of the north end of the Cadet trailer. ANNUAL FUNDRAISER The Coastwatcher Publication of the Thames River Composite Squadron Connecticut Wing Civil Air Patrol 300 Tower Rd., Groton, CT http://ct075.org . LtCol Stephen Rocketto, Editor [email protected] C/MSgt Virginia Poe, Reporter C/SrA Michael Hollingsworth, Printer's Devil Lt David Meers & Maj Roy Bourque, Papparazis The Squadron's annual raiser has started. Vol. VIII, No. 36 07 October, 2014 Squadron members who have not received their sales packets should contact LtCol Rocketto. SCHEDULE OF COMING EVENT Squadron expenses are about $6,000 each year. 11 OCT-Squadron Maintenance Day We raise $1400 from senior member dues, $600 14 OCT-TRCS Meeting from contributions and grants, and $4,000 from 17-19 OCT-CTWG/NER Conference our fruit sale. This money pays for our electricity, 16-18 OCT-NER AEO Course at Conference telephone, maintenance, equipment and supplies, 21 OCT-TRCS Meeting and van fuel. 18-25 OCT-NER Staff College-New Jersey 28 OCT-TRCS Meeting Last year only half of our Squadron members took part and 50% of the fruit was sold by 15% of our 01 NOV-CTWG SAREX members. This is lamentable. There is a 08-09 NOV-SLS Course-Meriden possibility that Squadron dues for Officers will be raised and dues for Cadets will be implemented if SQUADRON MAINTENANCE DAY we cannot raise sufficient funds. A Squadron maintenance day is scheduled for The fruit we sell is a first class product. -

Architecture Study of Space-Based Satellite Networks for NASA Missions
NASA/TM—2003-212187 Architecture Study of Space-Based Satellite Networks for NASA Missions William D. Ivancic Glenn Research Center, Cleveland, Ohio August 2003 The NASA STI Program Office . in Profile Since its founding, NASA has been dedicated to • CONFERENCE PUBLICATION. Collected the advancement of aeronautics and space papers from scientific and technical science. The NASA Scientific and Technical conferences, symposia, seminars, or other Information (STI) Program Office plays a key part meetings sponsored or cosponsored by in helping NASA maintain this important role. NASA. The NASA STI Program Office is operated by • SPECIAL PUBLICATION. Scientific, Langley Research Center, the Lead Center for technical, or historical information from NASA’s scientific and technical information. The NASA programs, projects, and missions, NASA STI Program Office provides access to the often concerned with subjects having NASA STI Database, the largest collection of substantial public interest. aeronautical and space science STI in the world. The Program Office is also NASA’s institutional • TECHNICAL TRANSLATION. English- mechanism for disseminating the results of its language translations of foreign scientific research and development activities. These results and technical material pertinent to NASA’s are published by NASA in the NASA STI Report mission. Series, which includes the following report types: Specialized services that complement the STI • TECHNICAL PUBLICATION. Reports of Program Office’s diverse offerings include completed research or a major significant creating custom thesauri, building customized phase of research that present the results of databases, organizing and publishing research NASA programs and include extensive data results . even providing videos. or theoretical analysis. Includes compilations of significant scientific and technical data and For more information about the NASA STI information deemed to be of continuing Program Office, see the following: reference value. -
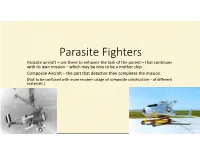
Parasite Fighters Parasite Aircraft – Are There to Enhance the Task of the Parent – That Continues with Its Own Mission – Which May Be Only to Be a Mother Ship
Parasite Fighters Parasite aircraft – are there to enhance the task of the parent – that continues with its own mission – which may be only to be a mother ship. Composite Aircraft – the part that detaches then completes the mission. (Not to be confused with more modern usage of composite construction – of different materials.) The Short-Mayo composite project, co-designed by Mayo and Shorts chief designer Arthur Gouge, comprised the Short S.21 Maia,(G-ADHK) which was a variant of the Short "C-Class" Empire flying-boat fitted with a trestle or pylon on the top of the fuselage to support the Short S.20 Mercury(G-ADHJ). Established a record flight for a seaplane of 6,045 miles (9,728 km) from Scotland to South Africa Composite Larger aircraft are commonly thought to be at risk from attacking fighters. One way of defence has often been considered – a fighter that rides along hitched to the parent aircraft – which can detach while airborne and defend the larger aircraft and perhaps re-attach in flight. Other missions for parasites have included reconnaissance and ground attack. Here I an concentrating on manned aircraft. Before the 2nd World War the Russians and after the war the Americans, experimented with parasite aircraft on aircraft In 1916 a Felixstowe Porte Baby was used to prove the concept of a larger aircraft carrying aloft and launching a lighter aircraft (in this case a Bristol Scout fighter). Airships carrying Aircraft Airship Aircraft Country Date Status Description Also tested glider L 35/LZ 80 Albatros D.III Germany February -

Potential Navy Force Structure and Shipbuilding Plans: Background and Issues for Congress
Order Code RL32665 CRS Report for Congress Received through the CRS Web Potential Navy Force Structure and Shipbuilding Plans: Background and Issues for Congress Updated June 23, 2005 Ronald O’Rourke Specialist in National Defense Foreign Affairs, Defense, and Trade Division Congressional Research Service ˜ The Library of Congress Potential Navy Force Structure and Shipbuilding Plans: Background and Issues for Congress Summary In February 2005, the Navy testified that the Navy in future years may require a total of 260 to 325 ships, or possibly 243 to 302 ships, depending on how much the Navy uses new technologies and a new ship crewing and deployment method called Sea Swap. In March 2005, the Navy provided a report to Congress showing the notional compositions of 260- and 325-ship fleets in FY2035. Navy ambiguity regarding required numbers of ships, together with proposed reductions and delays in Navy ship-procurement programs in the FY2006-FY2011 Future Years Defense Plan (FYDP), have caused concern among Members of Congress and others about future Navy capabilities and the shipbuilding industrial base. Ambiguity regarding required numbers of Navy ships may cause business- planning uncertainty for companies that own shipyards, and may make it difficult, if not impossible, for Congress to conduct effective oversight of the Navy budget and ship-procurement programs. Historical figures for the total number of ships in the Navy are not necessarily a reliable yardstick for assessing the adequacy of today’s Navy or a future planned Navy that includes a certain number of ships. Similarly, trends over time in the total number of ships in the Navy are not necessarily a reliable indicator of the direction of change over time in the fleet’s ability to perform its stated missions. -

Air & Space Power Journal
Chief of Staff, US Air Force Gen John P. Jumper Commander, Air Education and Training Command Gen Donald G. Cook http://www.af.mil Commander, Air University Lt Gen John F. Regni Commandant, College of Aerospace Doctrine, Research and Education Col David S. Fadok Editor Lt Col Paul D. Berg Senior Editor Lt Col Malcolm D. Grimes http://www.aetc.randolph.af.mil Associate Editor Maj Donald R. Ferguson Editor and Military Defense Analyst Col Larry Carter, USAF, Retired Professional Staff Marvin W. Bassett, Contributing Editor Philip S. Adkins, Contributing Editor Debbie Banker, Editorial Assistant Sherry Terrell, Editorial Assistant Steven C. Garst, Director of Art and Production Daniel M. Armstrong, Illustrator http://www.au.af.mil L. Susan Fair, Illustrator Ann Bailey, Prepress Production Manager Air and Space Power Chronicles Luetwinder T. Eaves, Managing Editor The Air and Space Power Journal, published quarterly, is the professional flagship publication of the United States Air Force. It is designed to serve as an open forum for the presentation and stimulation of innova tive thinking on military doctrine, strategy, tactics, http://www.cadre.maxwell.af.mil force structure, readiness, and other matters of na tional defense. The views and opinions expressed or implied in the Journal are those of the authors and should not be construed as carrying the official sanc tion of the Department of Defense, Air Force, Air Education and Training Command, Air University, or other agencies or departments of the US government. Articles in this edition may be reproduced in whole or Visit Air and Space Power Journal online in part without permission. -

The Future of the Future of Aircraft Carriers
Naval War College Review Volume 64 Article 4 Number 4 Autumn 2011 The uturF e of The uturF e of Aircraft aC rriers Robert C. Rubel Follow this and additional works at: https://digital-commons.usnwc.edu/nwc-review Recommended Citation Rubel, Robert C. (2011) "The uturF e of The uturF e of Aircraft aC rriers," Naval War College Review: Vol. 64 : No. 4 , Article 4. Available at: https://digital-commons.usnwc.edu/nwc-review/vol64/iss4/4 This Article is brought to you for free and open access by the Journals at U.S. Naval War College Digital Commons. It has been accepted for inclusion in Naval War College Review by an authorized editor of U.S. Naval War College Digital Commons. For more information, please contact [email protected]. Rubel: The Future of The Future of Aircraft Carriers THE FUTURE OF AIRCRAFT CARRIERS Robert C. Rubel he aircraft carrier has been around in various forms since the First World TWar. Its emergence as the key denominator of naval power is legendary, and its continuing prestige in this role is even yet spawning building programs among established and growing navies. The aircraft carrier is the largest and mostcomplexofallwarshipsandinmostcasesthemostexpensive.Inaddition to the cost of the ship itself, that of the embarked air wing must be considered, not to mention the extensive logistics and training infrastructure needed to keep carriers operating and useful. A recent Naval Postgraduate School study has shown that approximately 46 percent of the Navy’s personnel—officer, enlisted, 1 and civilian—are assigned to positions either on or supporting its carriers. -

Aeronautics. America in Space: the First Decade
DOCUMENT RESUME ED 059 057 SE 013 181 AUTHOR Anderton, David A. TITLE Aeronautics. Anterioa in Space: The First Decade. INSTITUTION National Aeronautics and Space Administration, Washington, D.C. REPORT NO EP-61 PUB DATE 70 NOTE 30p. AVAILABLE FROMSuperintendent of Documents, Government Printing Office, Washington, D.C. 20402 ($0.45) EDRS PRICE MF-$0.65 HC-$3.29 DESCRIPTORS *Aerospace Education; *Aerospace Technology; *Aviation Technology; Instructional Materials; Reading Materials; Research; Resource Materials; Science History; Technological Advancement IDENTIFIERS NASA ABSTRACT The major research and developments in aeronautics during the late 1950's and 1960's are reviewed descriptivelywith a minimum of technical content. Ttlpics covered include aeronautical research, aeronautics in NASA, The National Advisory Committeefor Aeronautics, the X-15 Research Airplane, variable-sweep wing design, the Supersonic Transport (SST) , hypersonic flight, today'saircraft, helicopters and V/STOL aircraft, research for spacecraft, air-breathing power plants, and reduction of engine noise. Many photographs and illustrations are utilized. (PR) U S DEPARTMENT OF HEALTH, EDUCATION & WELFARE OFFICE OF EDUCATION THIS DOCUMENT HAS BEEH REPRO DUCED EXACTLY AS RECEIVED FROM THE PERSON OR ORGANIZATION ORIG INATING IT POINTS OF VIEW OR OPIN IONS STATED DO NOT NECESSARILY REFRESENT OFFICIAL OFFICE OF EDU CATION POSITION OR POLICY National Aeronautics and SpaceAdministration America In Space: k. ^: The First Decade 6 by David A. Anderton National Aeronautics and -
From Venus to the Outer Planets: Multiple Atmospheric In-Situ
Cubesat Application for Planetary Entry (CAPE) Missions: Micro-Return Capsule (MIRCA) Jaime Esper NASA Goddard Space Flight Center Code 592 What is new? • So far, no microprobe (less than 10 kg) has entered another planetary atmosphere and successfully relayed data back to Earth. • Although the Deep Space 2 Mars microprobes did reach their destination (total mass about 6.5 kg each), unfortunately they were lost due to a combination of delivery system failures and other unknown factors. • GSFC, under R&D support, has been developing an inexpensive and pioneering technology based on the popular Cubesat specification. • Slow but steady progress to date. Cubesat Application for Planetary Entry (CAPE) Missions • Concept is based on the Cubesat design specification. • Within a science operational context, CAPE probes may be sent from Earth to study a celestial body’s atmosphere, or to “land” on some high-value target on its surface. • Either one or multiple probes may be targeted to distributed locations throughout the geographic landscape and could be released systematically and methodically from an orbiting spacecraft. • CAPE consists of two main functional components: the “Service Module” (SM), and “CAPE’s Entry Probe” (CEP). CAPE Components • The SM contains the subsystems necessary to support vehicle Micro-thruster targeting (propulsion, ACS, computer, power) and the communications capability to relay data from the CEP probe to Deployed Array an orbiting “mother-ship”. CubeSat 2U • The CEP itself carries the scientific Module Service instrumentation capable of measuring atmospheric properties (such as density, temperature, UHF or S-Band Entry Probe Entry composition), and embedded Planetary Comm. engineering sensors for Entry, ~1U Microprobe Descent, and Landing (EDL) technology monitoring and CAPE in its deployed configuration, and stowed assessment. -

Preparation of Papers for AIAA Technical Conferences
Motivation for Air-Launch: Past, Present, and Future John W. Kelly,* Charles E. Rogers,† Gregory T. Brierly,‡ J. Campbell Martin,§ and Marshall G. Murphy** NASA Armstrong Flight Research Center, Edwards, California, 93523 “Air-launch” is defined as two or more air-vehicles joined and working together, that eventually separate in flight, and that have a combined performance greater than the sum of the individual parts. The use of the air-launch concept has taken many forms across civil, commercial, and military contexts throughout the history of aviation. Air-launch techniques have been applied for entertainment, movement of materiel and personnel, efficient execution of aeronautical research, increasing aircraft range, and enabling flexible and efficient launch of space vehicles. For each air-launch application identified in this paper, the motivation for that application is discussed. Nomenclature AAF = Army Air Forces AFB = Air Force base AFRC = Armstrong Flight Research Center (Edwards, California) ALT = approach and landing test ASAT = antisatellite CRV = Crew Return Vehicle D.C. = District of Columbia ESA = European Space Agency FICON = Fighter Conveyor project FRC = Flight Research Center HiMAT = Highly Maneuverable Aircraft Technology ICBM = inter-continental ballistic missile ISS = International Space Station IXV = Intermediate eXperimental Vehicle KST = Kelly Space & Technology, Inc. (San Bernadino, California) NACA = National Advisory Committee on Aeronautics NASA = National Aeronautics and Space Administration NBC = National Broadcasting Company NOTS = Naval Ordnance Test Station RAF = Royal Air Force SBIR = Small Business Innovative Research SNC = Sierra Nevada Corporation (Sparks, Nevada) TGALS = Towed-Glider Air-Launch System U.S. = United States USS = United States Ship USAF = United States Air Force VMS = Virgin Mothership VSS = Virgin Spaceship WS-199 = Weapon Systems 199 WWI = World War I * Project Manager, Exploration & Space Technology Directorate, Senior Member. -

The Unique Aspects of a Commercial Space Accident Investigation
Is it a Space Plane or Rocket? The Unique Aspects of a Commercial Space Accident Investigation. E. Lorenda Ward ISASI Member # MO6251 Sr. Investigator-in-Charge U.S. National Transportation Safety Board Ms. Ward was hired by the National Transportation Safety Board (NTSB) in November 1998 as an aerospace engineer specializing in aircraft structures. In May 2001, she was promoted to Investigator-in-Charge (IIC). She has served as the IIC for numerous major aircraft accident investigations, including the recent commercial space investigation of SpaceShipTwo. She has also served as the US Accredited Representative for foreign accident and incident investigations all over the world. She received both her bachelor and master of aerospace engineering from Auburn University, Auburn, Alabama. Before beginning work with the NTSB, Ms. Ward worked as a civilian aerospace engineer for the US Navy. On October 31, 2014, the Scaled Composites SpaceShipTwo (SS2) reusable suborbital rocket, N339SS, broke into multiple pieces during its fourth rocket-powered flight test and impacted terrain over a 5-mile area near Koehn Dry Lake, California. One test pilot (the copilot) was fatally injured, and the other test pilot was seriously injured. SS2 had launched from the WhiteKnightTwo (WK2) carrier aircraft, N348MS, about 13 seconds before the breakup. SS2 was destroyed, and WK2 made an uneventful landing. Scaled Composites was operating SS2 under an experimental permit issued by the U.S. Federal Aviation Administration (FAA) Office of Commercial Space Transportation (AST) under the provisions of 14 Code of Federal Regulations (CFR) Part 437. The NTSB launched a go-team to begin the first fatal commercial space accident investigation. -

Maritime Crime: a Manual for Criminal Justice Practictioners
Maritime Crime: A Manual for Criminal Justice Practictioners GLOBAL MARITIME CRIME PROGRAMME UNITED NATIONS OFFICE ON DRUGS AND CRIME Vienna Maritime Crime: A Manual for Criminal Justice Practitioners Global Maritime Crime Programme UNITED NATIONS New York, 2017 © United Nations, March 2017. All rights reserved, worldwide. The designations employed and the presentation of material in this publication do not imply the expression of any opinion whatsoever on the part of the Secretariat of the United Nations concerning the legal status of any country, territory, city or area, or of its authorities, or concerning the delimitation of its frontiers or boundaries. Publishing production: English, Publishing and Library Section, United Nations Office at Vienna. ACKNOWLEDGEMENTS This Manual was prepared for the United Nations Office on Drugs and Crime (UNODC) by Dr. Robert McLaughlin, a consultant engaged by the UNODC Global Maritime Crime Programme. Contributing to the development of the Manual were: William Anderson, UNODC Siri Bjune, UNODC Alan Cole, UNODC Phillip Drew, Australian National University Anthony Francis Tissa Fernando, Court of Appeal of Seychelles Douglas Guilfoyle, Monash University Wolff Heintschel von Heinegg, Public Law (International Law, European Law and ForeignConstitutional Law) Foundation, European University Viadrina Patricia Jimenez Kwast, University of Oxford Ali Kamal-Deen, CEMLAWS Africa Stuart Kaye, University of Wollongong Benoit Le Goaziou, UNODC David Letts, Australian National University Patrick J McGuire, United