Chapter 4 the Mars Missions
Total Page:16
File Type:pdf, Size:1020Kb

Load more
Recommended publications
-
Alluvial Fans As Potential Sites for Preservation of Biosignatures on Mars
Alluvial Fans as Potential Sites for Preservation of Biosignatures on Mars Phylindia Gant August 15, 2016 Candidate, Masters of Environmental Science Committee Chair: Dr. Deborah Lawrence Committee Member: Dr. Manuel Lerdau, Dr. Michael Pace 2 I. Introduction Understanding the origin of life Life on Earth began 3.5 million years ago as the temperatures in the atmosphere were cool enough for molten rocks to solidify (Mojzsis et al 1996). Water was then able to condense and fall to the Earth’s surface from the water vapor that collected in the atmosphere from volcanoes. Additionally, atmospheric gases from the volcanoes supplied Earth with carbon, hydrogen, nitrogen, and oxygen. Even though the oxygen was not free oxygen, it was possible for life to begin from the primordial ooze. The environment was ripe for life to begin, but how would it begin? This question has intrigued humanity since the dawn of civilization. Why search for life on Mars There are several different scientific ways to answer the question of how life began. Some scientists believe that life started out here on Earth, evolving from a single celled organism called Archaea. Archaea are a likely choice because they presently live in harsh environments similar to the early Earth environment such as hot springs, deep sea vents, and saline water (Wachtershauser 2006). Another possibility for the beginning of evolution is that life traveled to Earth on a meteorite from Mars (Whitted 1997). Even though Mars is anaerobic, carbonate-poor and sulfur rich, it was warm and wet when Earth first had organisms evolving (Lui et al. -
Managing Software Development – the Hidden Risk * Dr
Managing Software Development – The Hidden Risk * Dr. Steve Jolly Sensing & Exploration Systems Lockheed Martin Space Systems Company *Based largely on the work: “Is Software Broken?” by Steve Jolly, NASA ASK Magazine, Spring 2009; and the IEEE Fourth International Conference of System of Systems Engineering as “System of Systems in Space 1 Exploration: Is Software Broken?”, Steve Jolly, Albuquerque, New Mexico June 1, 2009 Brief history of spacecraft development • Example of the Mars Exploration Program – Danger – Real-time embedded systems challenge – Fault protection 2 Robotic Mars Exploration 2011 Mars Exploration Program Search: Search: Search: Determine: Characterize: Determine: Aqueous Subsurface Evidence for water Global Extent Subsurface Bio Potential Minerals Ice Found Found of Habitable Ice of Site 3 Found Environments Found In Work Image Credits: NASA/JPL Mars: Easy to Become Infamous … 1. [Unnamed], USSR, 10/10/60, Mars flyby, did not reach Earth orbit 2. [Unnamed], USSR, 10/14/60, Mars flyby, did not reach Earth orbit 3. [Unnamed], USSR, 10/24/62, Mars flyby, achieved Earth orbit only 4. Mars 1, USSR, 11/1/62, Mars flyby, radio failed 5. [Unnamed], USSR, 11/4/62, Mars flyby, achieved Earth orbit only 6. Mariner 3, U.S., 11/5/64, Mars flyby, shroud failed to jettison 7. Mariner 4, U.S. 11/28/64, first successful Mars flyby 7/14/65 8. Zond 2, USSR, 11/30/64, Mars flyby, passed Mars radio failed, no data 9. Mariner 6, U.S., 2/24/69, Mars flyby 7/31/69, returned 75 photos 10. Mariner 7, U.S., 3/27/69, Mars flyby 8/5/69, returned 126 photos 11. -
Getting to Mars How Close Is Mars?
Getting to Mars How close is Mars? Exploring Mars 1960-2004 Of 42 probes launched: 9 crashed on launch or failed to leave Earth orbit 4 failed en route to Mars 4 failed to stop at Mars 1 failed on entering Mars orbit 1 orbiter crashed on Mars 6 landers crashed on Mars 3 flyby missions succeeded 9 orbiters succeeded 4 landers succeeded 1 lander en route Score so far: Earthlings 16, Martians 25, 1 in play Mars Express Mars Exploration Rover Mars Exploration Rover Mars Exploration Rover 1: Meridiani (Opportunity) 2: Gusev (Spirit) 3: Isidis (Beagle-2) 4: Mars Polar Lander Launch Window 21: Jun-Jul 2003 Mars Express 2003 Jun 2 In Mars orbit Dec 25 Beagle 2 Lander 2003 Jun 2 Crashed at Isidis Dec 25 Spirit/ Rover A 2003 Jun 10 Landed at Gusev Jan 4 Opportunity/ Rover B 2003 Jul 8 Heading to Meridiani on Sunday Launch Window 1: Oct 1960 1M No. 1 1960 Oct 10 Rocket crashed in Siberia 1M No. 2 1960 Oct 14 Rocket crashed in Kazakhstan Launch Window 2: October-November 1962 2MV-4 No. 1 1962 Oct 24 Rocket blew up in parking orbit during Cuban Missile Crisis 2MV-4 No. 2 "Mars-1" 1962 Nov 1 Lost attitude control - Missed Mars by 200000 km 2MV-3 No. 1 1962 Nov 4 Rocket failed to restart in parking orbit The Mars-1 probe Launch Window 3: November 1964 Mariner 3 1964 Nov 5 Failed after launch, nose cone failed to separate Mariner 4 1964 Nov 28 SUCCESS, flyby in Jul 1965 3MV-4 No. -

Deep Space Chronicle Deep Space Chronicle: a Chronology of Deep Space and Planetary Probes, 1958–2000 | Asifa
dsc_cover (Converted)-1 8/6/02 10:33 AM Page 1 Deep Space Chronicle Deep Space Chronicle: A Chronology ofDeep Space and Planetary Probes, 1958–2000 |Asif A.Siddiqi National Aeronautics and Space Administration NASA SP-2002-4524 A Chronology of Deep Space and Planetary Probes 1958–2000 Asif A. Siddiqi NASA SP-2002-4524 Monographs in Aerospace History Number 24 dsc_cover (Converted)-1 8/6/02 10:33 AM Page 2 Cover photo: A montage of planetary images taken by Mariner 10, the Mars Global Surveyor Orbiter, Voyager 1, and Voyager 2, all managed by the Jet Propulsion Laboratory in Pasadena, California. Included (from top to bottom) are images of Mercury, Venus, Earth (and Moon), Mars, Jupiter, Saturn, Uranus, and Neptune. The inner planets (Mercury, Venus, Earth and its Moon, and Mars) and the outer planets (Jupiter, Saturn, Uranus, and Neptune) are roughly to scale to each other. NASA SP-2002-4524 Deep Space Chronicle A Chronology of Deep Space and Planetary Probes 1958–2000 ASIF A. SIDDIQI Monographs in Aerospace History Number 24 June 2002 National Aeronautics and Space Administration Office of External Relations NASA History Office Washington, DC 20546-0001 Library of Congress Cataloging-in-Publication Data Siddiqi, Asif A., 1966 Deep space chronicle: a chronology of deep space and planetary probes, 1958-2000 / by Asif A. Siddiqi. p.cm. – (Monographs in aerospace history; no. 24) (NASA SP; 2002-4524) Includes bibliographical references and index. 1. Space flight—History—20th century. I. Title. II. Series. III. NASA SP; 4524 TL 790.S53 2002 629.4’1’0904—dc21 2001044012 Table of Contents Foreword by Roger D. -

Mars Insight Launch Press Kit
Introduction National Aeronautics and Space Administration Mars InSight Launch Press Kit MAY 2018 www.nasa.gov 1 2 Table of Contents Table of Contents Introduction 4 Media Services 8 Quick Facts: Launch Facts 12 Quick Facts: Mars at a Glance 16 Mission: Overview 18 Mission: Spacecraft 30 Mission: Science 40 Mission: Landing Site 53 Program & Project Management 55 Appendix: Mars Cube One Tech Demo 56 Appendix: Gallery 60 Appendix: Science Objectives, Quantified 62 Appendix: Historical Mars Missions 63 Appendix: NASA’s Discovery Program 65 3 Introduction Mars InSight Launch Press Kit Introduction NASA’s next mission to Mars -- InSight -- will launch from Vandenberg Air Force Base in California as early as May 5, 2018. It is expected to land on the Red Planet on Nov. 26, 2018. InSight is a mission to Mars, but it is more than a Mars mission. It will help scientists understand the formation and early evolution of all rocky planets, including Earth. A technology demonstration called Mars Cube One (MarCO) will share the launch with InSight and fly separately to Mars. Six Ways InSight Is Different NASA has a long and successful track record at Mars. Since 1965, it has flown by, orbited, landed and roved across the surface of the Red Planet. None of that has been easy. Only about 40 percent of the missions ever sent to Mars by any space agency have been successful. The planet’s thin atmosphere makes landing a challenge; its extreme temperature swings make it difficult to operate on the surface. But if a spacecraft survives the trip, there’s a bounty of science to be collected. -

Ella Carlsson Sjöberg
The red planet Mars Ella Carlsson Sjöberg KTH 2014-02-04 Outline • History • Mars 101 • The rovers • Water • DRM • Mars on Earth History • Nergal – Ares ♂ - Mars • Schiaparelli 1877 • Lowell 1895 • War of the Worlds 1938 Marsnik 1 (Mars 1960A) - 10 October 1960 - Flyby (launch failure) Marsnik 2 (Mars 1960B) - 14 October 1960 - Flyby (launch failure) Sputnik 22 - 24 October 1962 - Flyby (failure after launch) Mars 1 - 1 November 1962 – Fly by (lost contact) Sputnik 24 - 4 November 1962 - Lander (failure after launch) Mariner 3 - 5 November 1964 – Flyby (failure after launch) Mariner 4 - 28 November 1964 - Flyby Zond 2 - 30 November 1964 - Flyby (contact lost) Zond 3 - 18 July 1965 – Flyby of the Moon (missed launch window for Mars) Mariner 6 - 25 February 1969 - Flyby Mariner 7 - 27 Mars 1969 - Flyby Mars 1969A - 27 Mars 1969 - Satellite (launch failure) Mars 1969B - 2 April 1969 - Satellite (launch failure) Mariner 8 - 8 May 1971 - Satellite (launch failure) Kosmos 419 - 10 May 1971 – Satellite (launch failure) Mars 2 - 19 May 1971 - Satellite/lander (lost on the surface of Mars) Mars 3 - 28 May 1971 - Satellite/lander Mariner 9 - 30 May 1971 - Satellite Mars 4 - 21 July 1973 - Satellite -> Flyby Mars 5 - 25 July 1973 - Satellite Mars 6 - 5 August 1973 - Lander (contact lost) Mars 7 - 9 August 1973 - Lander -> Flyby (hard ware malfunction) Viking 1 - 20 August 1975 – Satellite/lander Viking 2 - 9 September 1975 –Satellite/lander Phobos 1 - 7 July 1988 - Satellite/Phobos-Lander (program error) Phobos 2 - 12 July 1988 - Satellite/Phobos-lander -
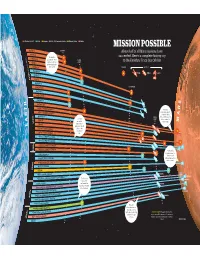
MISSION POSSIBLE KORABL 4 LAUNCH About Half of All Mars Missions Have
Russia/U.S.S.R. U.S. Japan U.K./ESA member states Russia/China India MISSION POSSIBLE KORABL 4 LAUNCH About half of all Mars missions have KORABL 5 ) The frst U.S. succeeded. Here’s a complete history, up s KORAB e L 11 to Mars t spacecraft EARTH a to the ExoMars Trace Gas Orbiter d mysteriously lost ORBIT MARS 1 h power eight hours c n KORA after launch u BL 13 FAILURE SUCCESS a L ( MARINER 3 s Flyby Orbiter Lander 0 MA 6 RINER 4 9 1 ZOND 2 MARINER 6 IN TRANSIT MARS 1969A MARINER 7 MARS 1969B MARINER 8 S H KOSMOS 419 MA R T RS 2 ORBITER/LANDER The frst man-made object MARS 3 ORBITER/LAN DER A R to land on Mars. s MARINER 9 MARS But contact was lost 0 The frst 7 ORBIT 20 seconds after A MARS 9 4 successful touchdown M 1 Mars surface MARS 5 E exploration found all elements MARS 6 FLYBY/LAND ER essential to MARS 7 FLYBY/LANDER life VIKING 1 ORBITER/LANDER VIKING 2 ORBITER/LANDER s 0 PHOBOS 1 ORBITER/LANDER 8 9 PHOBOS 2 ORBITER/LANDER 1 Pathfinder’s Sojourner was the MARS OBSERVER frst wheeled MARS GLOBAL SURVEYOR vehicle deployed on another planet s MARS 96 ORBITER/LANDER 0 9 MARS PATHFINDER 9 1 NOZOMI MARS CLIMATE ORBITER ONGOING ONGOING 2 PROBES/MARS POLAR LANDER The Phoenix ONGOING DEEP SPACE ONGOING lander frst MARS ODYSSEY confrmed the ONGOING presence of water /BEAGLE 2 LANDER MARS EXPRESS ORBITER in soil samples s RIT MARS EXPLORATION ROVER–SPI ONGOING 0 0 OVER–OPPORTUNITY 0 MARS EXPLORATION R ONGOING 2 ITER MARS RECONNAISSANCE ORB ENIX MARS LANDER PHO Curiosity descended on the -GRUNT/YINGHUO-1 PHOBOS frst “sky crane,” a s B/CURIOSITY highly precise landing DID YOU KNOW? The early missions had 0 MARS SCIENCE LA 1 system for large up to seven diferent names. -
Dynamical Meteorology of the Martian Atmosphere
Aspects of Martian Meteorology From SurfaceDynamical Observations Meteorology Including of from the the Martian2012 Mars Atmosphere “Curiosity” Rover Mars Science Laboratory Curiosity The “Curiosity” rover in clean room at JPL Mars Science Laboratory Curiosity Mars Science Laboratory Curiosity Mars Science Laboratory Curiosity Outline • Basics – orbit, topography, atmospheric composition • Basics – dust, dust everywhere • History of Mars planetary missions 1962-today • Satellite measurments of atmospheric temperature • Surface T, P and u,v observations • Pressure record – annual cycle, baroclinic waves • Pressure record – diurnal variations (atmospheric tides) • Mars General Circulation Models (GCMs) • Model simulations of atmospheric tides • I am curious about Curiosity! Mars orbit and annual cycle • Measure time through the year (or position through the o orbit) by Ls (“Areocentric longitude”) (defined so that Ls=0 is NH spring equinox “March 21”) • Aphelion 249,209,300 km • Perihelion 206,669,000 km o • Ls of perihelion 250 - late SH spring Mars orbit and annual cycle • Measure time through the year (or position through the o orbit) by Ls (“Areocentric longitude”) (defined so that Ls=0 is NH spring equinox “March 21”) 2 2 Ra /Rp = 1.42 (vs. 1.07 for Earth) • Aphelion 249,209,300 km • Perihelion 206,669,000 km o • Ls of perihelion 250 - late SH spring CO2 Ice Cap Helas Basin Tharsus Rise Helas Basin Equatorial section through smoothed topography Equatorial section through smoothed topography Zonal wavenumber 2 topography • 1962 Mars -

Index of Astronomia Nova
Index of Astronomia Nova Index of Astronomia Nova. M. Capderou, Handbook of Satellite Orbits: From Kepler to GPS, 883 DOI 10.1007/978-3-319-03416-4, © Springer International Publishing Switzerland 2014 Bibliography Books are classified in sections according to the main themes covered in this work, and arranged chronologically within each section. General Mechanics and Geodesy 1. H. Goldstein. Classical Mechanics, Addison-Wesley, Cambridge, Mass., 1956 2. L. Landau & E. Lifchitz. Mechanics (Course of Theoretical Physics),Vol.1, Mir, Moscow, 1966, Butterworth–Heinemann 3rd edn., 1976 3. W.M. Kaula. Theory of Satellite Geodesy, Blaisdell Publ., Waltham, Mass., 1966 4. J.-J. Levallois. G´eod´esie g´en´erale, Vols. 1, 2, 3, Eyrolles, Paris, 1969, 1970 5. J.-J. Levallois & J. Kovalevsky. G´eod´esie g´en´erale,Vol.4:G´eod´esie spatiale, Eyrolles, Paris, 1970 6. G. Bomford. Geodesy, 4th edn., Clarendon Press, Oxford, 1980 7. J.-C. Husson, A. Cazenave, J.-F. Minster (Eds.). Internal Geophysics and Space, CNES/Cepadues-Editions, Toulouse, 1985 8. V.I. Arnold. Mathematical Methods of Classical Mechanics, Graduate Texts in Mathematics (60), Springer-Verlag, Berlin, 1989 9. W. Torge. Geodesy, Walter de Gruyter, Berlin, 1991 10. G. Seeber. Satellite Geodesy, Walter de Gruyter, Berlin, 1993 11. E.W. Grafarend, F.W. Krumm, V.S. Schwarze (Eds.). Geodesy: The Challenge of the 3rd Millennium, Springer, Berlin, 2003 12. H. Stephani. Relativity: An Introduction to Special and General Relativity,Cam- bridge University Press, Cambridge, 2004 13. G. Schubert (Ed.). Treatise on Geodephysics,Vol.3:Geodesy, Elsevier, Oxford, 2007 14. D.D. McCarthy, P.K. -
Mars Insight Landing Press Kit
Introduction National Aeronautics and Space Administration Mars InSight Landing Press Kit NOVEMBER 2018 www.nasa.gov 1 Table of Contents Introduction 3 Media Services 6 Quick Facts: Landing Facts 11 Quick Facts: Mars at a Glance 15 Mission: Overview 17 Mission: Spacecraft 29 Mission: Science 40 Mission: Landing Site 54 Program & Project Management 56 Appendix: Mars Cube One Tech Demo 58 Appendix: Gallery 62 Appendix: Science Objectives, Quantified 64 Appendix: Historical Mars Missions 65 Appendix: NASA’s Discovery Program 67 2 Introduction Mars InSight Landing Press Kit Introduction NASA’s next mission to Mars -- InSight -- is expected to land on the Red Planet on Nov. 26, 2018. InSight is a mission to Mars, but it is also more than a Mars mission. It will help scientists understand the formation and early evolution of all rocky planets, including Earth. In addition to InSight, a technology demonstration called Mars Cube One (MarCO) is flying separately to the Red Planet. It will test a new kind of data relay from another InSight will help us learn about the formation of Mars -- as well planet for the first time, though InSight’s success is not as all rocky planets. Credit: NASA/JPL-Caltech dependent on MarCO. Five Things to Know About Landing 1. Landing on Mars is difficult Only about 40 percent of the missions ever sent to Mars -- by any space agency -- have been successful. The U.S. is the only nation whose missions have survived a Mars landing. The thin atmosphere -- just 1 percent of Earth’s -- means that there’s little friction to slow down a spacecraft. -
Mars 2020 Perseverance Launch Press Kit
National Aeronautics and Space Administration Mars 2020 Perseverance Launch Press Kit JUNE 2020 www.nasa.gov Table of contents INTRODUCTION 3 MEDIA SERVICES 11 QUICK FACTS 16 MISSION OVERVIEW 21 SPACECRAFT PERSEVERANCE ROVER 30 GETTING TO MARS 34 POWER 38 TELECOMMUNICATIONS 40 BIOLOGICAL CLEANLINESS 42 EXPERIMENTAL TECHNOLOGIES 45 SCIENCE 49 LANDING SITE 56 MANAGEMENT 58 MORE ON MARS 59 Introduction NASA’s next mission to Mars — the Mars 2020 Perseverance mission — is targeted to launch from Cape Canaveral Air Force Station no earlier than July 20, 2020. It will land in Jezero Crater on the Red Planet on Feb. 18, 2021. Perseverance is the most sophisticated rover NASA has ever sent to Mars, with a name that embodies NASA’s passion for taking on and overcoming challenges. It will search for signs of ancient microbial life, characterize the planet’s geology and climate, collect carefully selected and documented rock and sediment samples for possible return to Earth, and pave the way for human exploration beyond the Moon. Perseverance will also ferry a separate technology experiment to the surface of Mars — a helicopter named Ingenuity, the first aircraft to fly in a controlled way on another planet. Update: As of June 24, the launch is targeted for no earlier than July 22, 2020. Additional updates can be found on the mission’s launch page. Seven Things to Know About the Mars 2020 Perseverance Mission The Perseverance rover, built at NASA’s Jet Propulsion Laboratory in Southern California, is loaded with scientific instruments, advanced computational capabilities for landing and other new systems. -

The Path to Mars
Launch Date Name Country Result Reason 1960 Korabl 4 USSR (flyby) Failure Didn't reach Earth orbit 1960 Korabl 5 USSR (flyby) Failure Didn't reach Earth orbit 1962 Korabl 11 USSR (flyby) Failure Earth orbit only; spacecraft broke apart 1962 Mars 1 USSR (flyby) Failure Radio Failed 1962 Korabl 13 USSR (flyby) Failure Earth orbit only; spacecraft broke apart 1964 Mariner 3 US (flyby) Failure Shroud failed to jettison 1964 Mariner 4 US (flyby) Success Returned 21 images 1964 Zond 2 USSR (flyby) Failure Radio failed 1969 Mars 1969A USSR Failure Launch vehicle failure 1969 Mars 1969B USSR Failure Launch vehicle failure 1969 Mariner 6 US (flyby) Success Returned 75 images 1969 Mariner 7 US (flyby) Success Returned 126 images 1971 Mariner 8 US Failure Launch failure 1971 Kosmos 419 USSR Failure Achieved Earth orbit only 1971 Mars 2 Orb/Lander USSR Failure Orbiter arrived, but no useful data and Lander destroyed 1971 Mars 3 Orb/Lander USSR Success Orbiter obtained approximately 8 months of data and lander landed safely, but only 20 seconds of data 1971 Mariner 9 US Success Returned 7,329 images 1973 Mars 4 USSR Failure Flew past Mars 1973 Mars 5 USSR Success Returned 60 images; only lasted 9 days 1973 Mars 6 Orb/Lander USSR Success/Failure Occultation experiment produced data and Lander failure on descent 1973 Mars 7 Lander USSR Failure Missed planet; now in solar orbit. 1975 Viking 1 Orb/Lander US Success Located landing site for Lander and first successful landing on Mars 1975 Viking 2 Orb/Lander US Success Returned 16,000 images and extensive atmospheric