Cranfield University Xue Longxian Actuation
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Electrical Power Codde 1 Page 1 / 6 General Dgt97831 Issue 2
FALCON 7X 02-24-05 ATA 24 – ELECTRICAL POWER CODDE 1 PAGE 1 / 6 GENERAL DGT97831 ISSUE 2 ACRONYMS AC Alternative Current APU Auxiliary Power Unit BC Battery Contactor BIT Built In Test BTC Bus Tie Contactor CAS Crew Alerting System CB Circuit Breaker CLSC Cabin Load Shed Contactor CMC Central Maintenance Computer DC Direct Current ECU Electronic Control Unit EEC Engine Electronic Controller FADEC Full Authority Digital Electronic Control FBW Fly By Wire GCU Generator Control Unit GLC Generator Line Contactor GLSC Galley Load Shed Contactor GPC Ground Power Contactor GPU Ground Power Unit GSB Ground Service Bus LFSPDB Left Front Secondary Power Distribution Box LH Left Hand LPPDB Left Primary Power Distribution Box LRSPDB Left Rear Secondary Power Distribution Box LS Load shed MAU Modular Avionic Unit MDU Multi function Display Unit MMEL Master Minimum Equipment List O/C OverCurrent OP Overhead Panel OVHT OVerHeaT PDCU Power Distribution Control Unit PFCS Primary Flight Control System PMA Permanent Magnet Alternator PPDB Primary Power Distribution Box RAT Ram Air Turbine RATC Ram Air Turbine Contactor DASSAULT AVIATION Proprietary Data 02-24-05 FALCON 7X ATA 24 – ELECTRICAL POWER PAGE 2 / 6 CODDE 1 GENERAL ISSUE 2 DGT97831 RFSPDB Right Front Secondary Power Distribution Box RH Right Hand RPPDB Right Primary Power Distribution Box RRSPDB Right Rear Secondary Power Distribution Box S/G Starter Generator SOV Shut Off Valve SPDB Secondary Power Distribution Box SSPC Solid State Power Controller TRU Transformer Rectifier Unit VDC Volt Direct Courant DASSAULT AVIATION Proprietary Data FALCON 7X 02-24-05 ATA 24 – ELECTRICAL POWER CODDE 1 PAGE 3 / 6 GENERAL DGT97831 ISSUE 2 INTRODUCTION The Falcon 7X uses 28 Volts DC power for operation of the various systems installed in the airplane. -
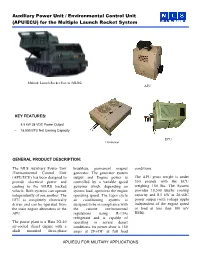
Auxiliary Power Unit / Environmental Control Unit (APU/ECU) for the Multiple Launch Rocket System
Auxiliary Power Unit / Environmental Control Unit (APU/ECU) for the Multiple Launch Rocket System Multiple Launch Rocket System (MLRS) APU KEY FEATURES: − 8.5 kW 28 VDC Power Output − 18,500 BTU Net Cooling Capacity ECU Condenser GENERAL PRODUCT DESCRIPTION: The MLS Auxiliary Power Unit brushless, permanent magnet conditions. /Environmental Control Unit generator. The generator system (APU/ECU) has been designed to output and Engine power is The APU gross weight is under provide electrical power and controlled by a variable speed 330 pounds with the ECU cooling to the MLRS tracked governor which, depending on weighing 150 lbs. The System vehicle. Both systems can operate system load, optimizes the engine provides 18,500 Btu/hr cooling independently of one another. The operating speed. The vapor cycle capacity and 8.5 kW at 28-vDC ECU is completely electrically air conditioning system is power output (with voltage ripple driven and can be operated from designed to be in compliance with independent of the engine speed the main engine alternators or the the current environmental or load at less than 100 mV APU. regulations using R-134a RMS). refrigerant and is capable of The power plant is a Hatz 2G-40 operating in severe desert air-cooled diesel engine with a conditions. Its power draw is 150 shaft mounted three-phase amps at 28-vDC at full load APU/ECU FOR MILITARY APPLICATIONS Auxiliary Power Unit / Environmental Control Unit (APU/ECU) for the Multiple Launch Rocket System Condenser Assembly APU Evaporator Assembly Overall APU/ECU Specifications: Exterior Dimensions (L x W x H)........................................…........... -

Lockheed Martin F-35 Lightning II Incorporates Many Significant Technological Enhancements Derived from Predecessor Development Programs
AIAA AVIATION Forum 10.2514/6.2018-3368 June 25-29, 2018, Atlanta, Georgia 2018 Aviation Technology, Integration, and Operations Conference F-35 Air Vehicle Technology Overview Chris Wiegand,1 Bruce A. Bullick,2 Jeffrey A. Catt,3 Jeffrey W. Hamstra,4 Greg P. Walker,5 and Steve Wurth6 Lockheed Martin Aeronautics Company, Fort Worth, TX, 76109, United States of America The Lockheed Martin F-35 Lightning II incorporates many significant technological enhancements derived from predecessor development programs. The X-35 concept demonstrator program incorporated some that were deemed critical to establish the technical credibility and readiness to enter the System Development and Demonstration (SDD) program. Key among them were the elements of the F-35B short takeoff and vertical landing propulsion system using the revolutionary shaft-driven LiftFan® system. However, due to X- 35 schedule constraints and technical risks, the incorporation of some technologies was deferred to the SDD program. This paper provides insight into several of the key air vehicle and propulsion systems technologies selected for incorporation into the F-35. It describes the transition from several highly successful technology development projects to their incorporation into the production aircraft. I. Introduction HE F-35 Lightning II is a true 5th Generation trivariant, multiservice air system. It provides outstanding fighter T class aerodynamic performance, supersonic speed, all-aspect stealth with weapons, and highly integrated and networked avionics. The F-35 aircraft -

Aircraft Collection
A, AIR & SPA ID SE CE MU REP SEU INT M AIRCRAFT COLLECTION From the Avenger torpedo bomber, a stalwart from Intrepid’s World War II service, to the A-12, the spy plane from the Cold War, this collection reflects some of the GREATEST ACHIEVEMENTS IN MILITARY AVIATION. Photo: Liam Marshall TABLE OF CONTENTS Bombers / Attack Fighters Multirole Helicopters Reconnaissance / Surveillance Trainers OV-101 Enterprise Concorde Aircraft Restoration Hangar Photo: Liam Marshall BOMBERS/ATTACK The basic mission of the aircraft carrier is to project the U.S. Navy’s military strength far beyond our shores. These warships are primarily deployed to deter aggression and protect American strategic interests. Should deterrence fail, the carrier’s bombers and attack aircraft engage in vital operations to support other forces. The collection includes the 1940-designed Grumman TBM Avenger of World War II. Also on display is the Douglas A-1 Skyraider, a true workhorse of the 1950s and ‘60s, as well as the Douglas A-4 Skyhawk and Grumman A-6 Intruder, stalwarts of the Vietnam War. Photo: Collection of the Intrepid Sea, Air & Space Museum GRUMMAN / EASTERNGRUMMAN AIRCRAFT AVENGER TBM-3E GRUMMAN/EASTERN AIRCRAFT TBM-3E AVENGER TORPEDO BOMBER First flown in 1941 and introduced operationally in June 1942, the Avenger became the U.S. Navy’s standard torpedo bomber throughout World War II, with more than 9,836 constructed. Originally built as the TBF by Grumman Aircraft Engineering Corporation, they were affectionately nicknamed “Turkeys” for their somewhat ungainly appearance. Bomber Torpedo In 1943 Grumman was tasked to build the F6F Hellcat fighter for the Navy. -

AP3456 the Central Flying School (CFS) Manual of Flying: Volume 4 Aircraft Systems
AP3456 – 4-1- Hydraulic Systems CHAPTER 1 - HYDRAULIC SYSTEMS Introduction 1. Hydraulic power has unique characteristics which influence its selection to power aircraft systems instead of electrics and pneumatics, the other available secondary power systems. The advantages of hydraulic power are that: a. It is capable of transmitting very high forces. b. It has rapid and precise response to input signals. c. It has good power to weight ratio. d. It is simple and reliable. e. It is not affected by electro-magnetic interference. Although it is less versatile than present generation electric/electronic systems, hydraulic power is the normal secondary power source used in aircraft for operation of those aircraft systems which require large power inputs and precise and rapid movement. These include flying controls, flaps, retractable undercarriages and wheel brakes. Principles 2. Basic Power Transmission. A simple practical application of hydraulic power is shown in Fig 1 which depicts a closed system typical of that used to operate light aircraft wheel brakes. When the force on the master cylinder piston is increased slightly by light operation of the brake pedals, the slave piston will extend until the brake shoe contacts the brake drum. This restriction will prevent further movement of the slave and the master cylinder. However, any increase in force on the master cylinder will increase pressure in the fluid, and it will therefore increase the braking force acting on the shoes. When braking is complete, removal of the load from the master cylinder will reduce hydraulic pressure, and the brake shoe will retract under spring tension. -

The Market for Aviation APU Engines
The Market for Aviation APU Engines Product Code #F644 A Special Focused Market Segment Analysis by: Aviation Gas Turbine Forecast Analysis 2 The Market for Aviation APU Engines 2011 - 2020 Table of Contents Executive Summary .................................................................................................................................................2 Introduction................................................................................................................................................................2 Methodology ..............................................................................................................................................................2 Trends..........................................................................................................................................................................3 The Competitive Environment...............................................................................................................................3 Market Statistics .......................................................................................................................................................3 Table 1 - The Market for Aviation APU Engines Unit Production by Headquarters/Company/Program 2011 - 2020 ..................................................5 Table 2 - The Market for Aviation APU Engines Value Statistics by Headquarters/Company/Program 2011 - 2020.................................................10 Figure 1 - The Market -
Calculated Drag of an Aerial Refueling Assembly Through Airplane Performance Analysis
NASA/TM-2004-212043 Calculated Drag of an Aerial Refueling Assembly Through Airplane Performance Analysis Michael Jacob Vachon and Ronald J. Ray NASA Dryden Flight Research Center Edwards, California Carl Calianno NAVAIR Patuxent River, Maryland EC03-0293-02 February 2004 The NASA STI Program Office…in Profile Since its founding, NASA has been dedicated • CONFERENCE PUBLICATION. to the advancement of aeronautics and space Collected papers from scientific and science. The NASA Scientific and Technical technical conferences, symposia, seminars, Information (STI) Program Office plays a key or other meetings sponsored or cosponsored part in helping NASA maintain this by NASA. important role. • SPECIAL PUBLICATION. Scientific, The NASA STI Program Office is operated by technical, or historical information from Langley Research Center, the lead center for NASA programs, projects, and mission, NASA’s scientific and technical information. often concerned with subjects having The NASA STI Program Office provides access substantial public interest. to the NASA STI Database, the largest collection of aeronautical and space science STI in the • TECHNICAL TRANSLATION. English- world. The Program Office is also NASA’s language translations of foreign scientific institutional mechanism for disseminating the and technical material pertinent to results of its research and development activities. NASA’s mission. These results are published by NASA in the NASA STI Report Series, which includes the Specialized services that complement the STI following report types: Program Office’s diverse offerings include creating custom thesauri, building customized databases, organizing and publishing research • TECHNICAL PUBLICATION. Reports of results…even providing videos. completed research or a major significant phase of research that present the results of For more information about the NASA STI NASA programs and include extensive data Program Office, see the following: or theoretical analysis. -

Bagram Airfield, Afghanistan
UNITED STATES AIR FORCE AIRCRAFT ACCIDENT INVESTIGATION BOARD REPORT E-11A, T/N 11-9358 430TH EXPEDITIONARY ELECTRONIC COMBAT SQUADRON 455TH AIR EXPEDITIONARY WING BAGRAM AIRFIELD, AFGHANISTAN LOCATION: GHAZNI PROVINCE, AFGHANISTAN DATE OF ACCIDENT: 27 JANUARY 2020 BOARD PRESIDENT: BRIG GEN CRAIG BAKER Conducted IAW Air Force Instruction 51-307 EXECUTIVE SUMMARY UNITED STATES AIR FORCE AIRCRAFT ACCIDENT INVESTIGATION E-11A, T/N 11-9358 GHAZNI PROVINCE, AFGHANISTAN 27 JANUARY 2020 On 27 January 2020, at approximately 1309 hours local time (L), an E-11A, tail number (T/N) 11- 9358, was destroyed after touching down in a field in Ghanzi Province, Afghanistan (AFG) following a catastrophic left engine failure. The mishap crew (MC) were deployed and assigned to the 430th Expeditionary Electronic Combat Squadron (EECS), Kandahar Airfield (KAF), AFG. The MC consisted of mishap pilot 1 (MP1) and mishap pilot 2 (MP2). The mission was both a Mission Qualification Training – 3 (MQT-3) sortie for MP2 and a combat sortie for the MC, flown in support of Operation FREEDOM’S SENTINEL. MP1 and MP2 were fatally injured as a result of the accident, and the Mishap Aircraft (MA) was destroyed. At 1105L, the MA departed KAF. The mission proceeded uneventfully until the left engine catastrophically failed one hour and 45 minutes into the flight (1250:52L). Specifically, a fan blade broke free causing the left engine to shutdown. The MC improperly assessed that the operable right engine had failed and initiated shutdown of the right engine leading to a dual engine out emergency. Subsequently, the MC attempted to fly the MA back to KAF, approximately 230 nautical miles (NM) away. -

Systems Study for an Integrated Digital/Electric Aircraft (IDEA)
NASA-CR-3840 19850007405 NASA Contractor Report 3840 t i Systems Study for an Integrated Digital/Electric Aircraft (IDEA) G. E. Tagge, L. A. Irish, and A. R.Bailey CONTRACT NAS1-17528 JANUARY 1985 R [_.._ _ _ _'l _ €__!7 . ','7:2! ' ;: ;; 11) LANGLEY RESEJtRCHCEI",I_ER LIBRARY, NASA H;_4MPTO_JVIRG_N!A, NASA Contractor Report 3840 Systems Study for an Integrated Digital/Electric Aircraft (IDEA) G. E. Tagge, L. A. Irish, and A. R. Bailey Boeing Commercial Airplane Company Seattle, Washington Prepared for Langley Research Center under Contract NAS1-17528 N/ A NationalAeronautics and SpaceAdministration Scientific and Technical IntormatlonBranch 1985 FOREWORD This document constitutes the final report of the Integrated Digital/Electric Aircraft (IDEA)Program,ContractNASI-17528. The major studyobjectiveweres to definethe configurationof an IDEA aircraftd,efine technicalrisksassociatedwith the IDEA systemsconcepts,and identifytheresearchand developmentrequiredto reducetheserisksforpotentialapplicationto transporatircraft intheearly1990s. The NASA TechnicalRepresentativeforthistaskwas Cary R. SF1tzer;the Contracting Officerwas James Y. Taylor,of theLangleyResearchCenter. The work was accompUshed withinthe PreUmlnaryDesign Department of the Boeing Commercial AirplaneCompany. Key personnelwho contrlbutewdere: G. E.Tagge ProgramManager L.A. Irish StudyManager J.D.Vachal AerodynamicsTechnology L.A. Ostrom AerodynamicsTechnology R. H. Johnson PropulslonTeclmology G. G. Redfield PropulsionTechnology A. R. Bailey WeightsTechnology K. E. Siedentopf We_,_htsTechnology D. L.Grande StructuresTechnology C. B. Crumb Electronic FlightControlDesign F.Byford Mechanical FlightControlDesign W. F. Shivttz Flight Systems Technology C. W. Lee Flight Systems Technology P.J.Campbell FUght Systems Technology J. W. Harper Airframe Systems Technology-Electrlcal K. T. Tanemura AirframeSystemsTechnology-ECS E. C. Lim AirframeSystemsTechnology-ECS R. A. Johnson AirframeSystemsTechnology-ECS D. E. Cozby AirframeSystemsTechnology-lcing J.R. -

Auxiliary Power Unit (APU) Removal
Auxiliary Power Unit (APU) Removal DHC-8 400 The FIELD AVIATION temporary Auxiliary Power Unit (APU) Removal STC allows for continued operations of the aircraft with the APU removed. Benefits • Dispatch when APU is removed • Weight savings of approximately 200 Lbs when APU is removed Kit Content • Removal/re-installation instructions • Blanking plates & connector caps • Installation data package • Certification documentation Installation • Approximately 16 man-hours Typical Lead Time • 3 Weeks ARO The modification involves the removal of the APU Starter/Generator and the APU engine. The Certification Basis remaining APU system components such as the FADEC and APU Fuel Pump are disabled. • TC STC • FAA STC • EASA STC While the Bombardier Aircraft Maintenance Manual provides instructions for the removal of the APU while the aircraft is undergoing maintenance, it does not allow the aircraft to operate Complimentary Mods • RH Ground Air Connection with the APU removed. In addition, the aircraft Minimum Equipment List (MEL) Procedures Manual does not list the APU and APU Bleed Air System as required equipment for dispatch and provides maintenance procedures for dispatch with the APU and APU Bleed Air System inoperative. These maintenance procedures are incorporated into this modification. Removal of the APU involves the following: • Removal of the APU, Starter Generator and miscellaneous accessories • Capping and stowing the associated electrical harnesses • Capping and stowing of fuel lines • Blanking of the Engine Inlet Silencer • Blanking of the APU Bleed Air Tube • Installation of Placards • Function check of the DC Power System Aircraft Modifiers to the World CALGARY • CINCINNATI • OKLAHOMA CITY • TORONTO. -

Revisiting System's Pages in Engine Indication and Alerting System for Flight Crew Using the DSCU Architecture and the OQCR System Generic State Description
Revisiting system’s pages in engine indication and alerting system for flight crew using the DSCU architecture and the OQCR system generic state description Elodie Bouzekri, Alexandre Canny, Célia Martinie de Almeida, Philippe Palanque, Eric Barboni, David Navarre, Christine Gris, Yannick Deleris To cite this version: Elodie Bouzekri, Alexandre Canny, Célia Martinie de Almeida, Philippe Palanque, Eric Barboni, et al.. Revisiting system’s pages in engine indication and alerting system for flight crew using the DSCU architecture and the OQCR system generic state description. INCOSE International Conference on Human System Integration (INCOSE HSI 2019), Sep 2019, Biarritz, France. pp.1-9. hal-02450862 HAL Id: hal-02450862 https://hal.archives-ouvertes.fr/hal-02450862 Submitted on 23 Jan 2020 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Open Archive Toulouse Archive Ouverte OATAO is an open access repository that collects the work of Toulouse researchers and makes it freely available over the web where possible This is an author’s version published in: http://oatao.univ-toulouse.fr/24919 To cite this version: Bouzekri, Elodie and Canny, Alexandre and Martinie De Almeida, Celia and Palanque, Philippe and Barboni, Eric and Navarre, David and Gris, Christine and Deleris, Yannick Revisiting system's pages in engine indication and alerting system for flight crew using the DSCU architecture and the OQCR system generic state description. -

Aircraft Technology Roadmap to 2050 | IATA
Aircraft Technology Roadmap to 2050 NOTICE DISCLAIMER. The information contained in this publication is subject to constant review in the light of changing government requirements and regulations. No subscriber or other reader should act on the basis of any such information without referring to applicable laws and regulations and/or without taking appropriate professional advice. Although every effort has been made to ensure accuracy, the International Air Transport Association shall not be held responsible for any loss or damage caused by errors, omissions, misprints or misinterpretation of the contents hereof. Furthermore, the International Air Transport Association expressly disclaims any and all liability to any person or entity, whether a purchaser of this publication or not, in respect of anything done or omitted, and the consequences of anything done or omitted, by any such person or entity in reliance on the contents of this publication. © International Air Transport Association. All Rights Reserved. No part of this publication may be reproduced, recast, reformatted or transmitted in any form by any means, electronic or mechanical, including photocopying, recording or any information storage and retrieval system, without the prior written permission from: Senior Vice President Member & External Relations International Air Transport Association 33, Route de l’Aéroport 1215 Geneva 15 Airport Switzerland Table of Contents Table of Contents ..............................................................................................................................................................................................................