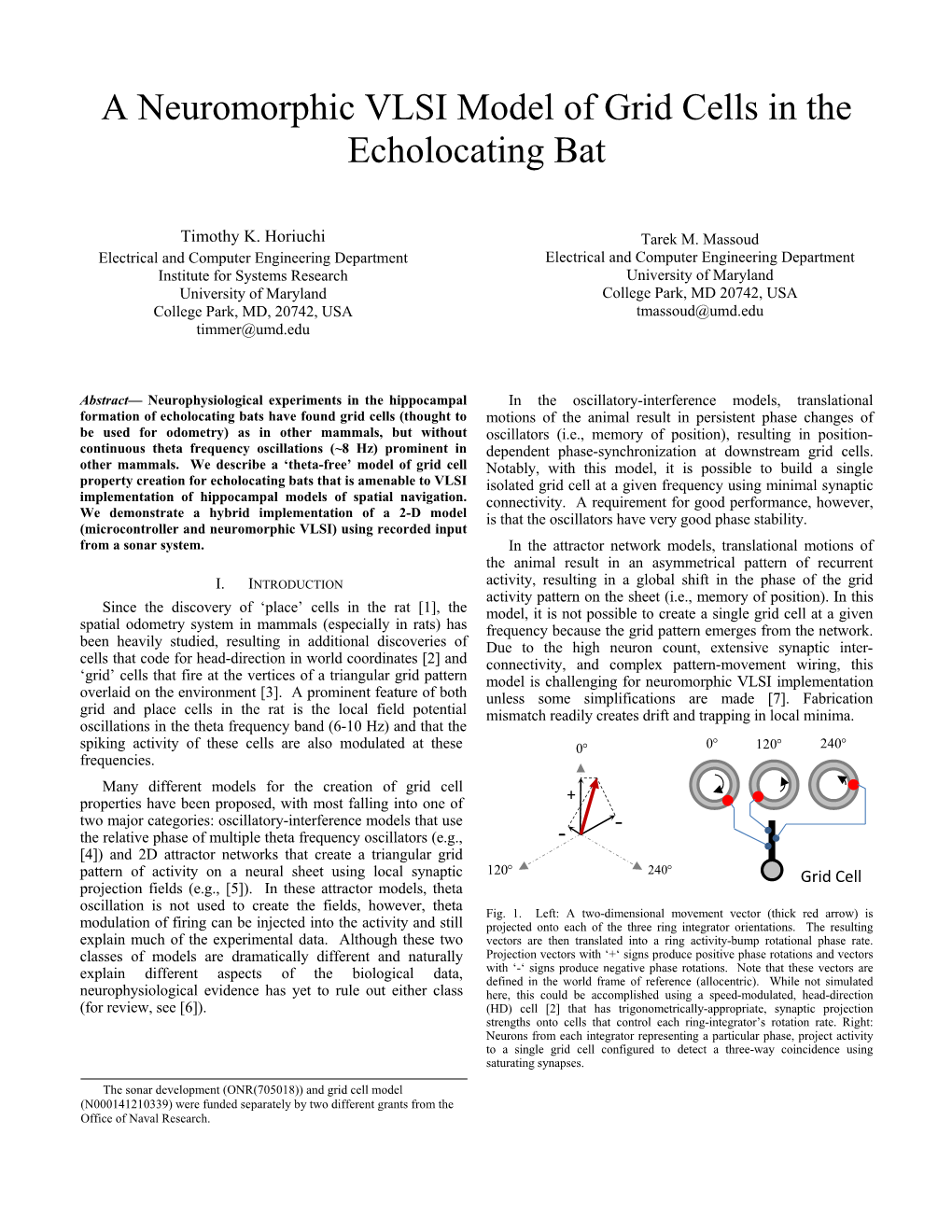
A Neuromorphic VLSI Model of Grid Cells in the Echolocating Bat
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Grid Cells Are Ubiquitous in Neural Networks
Grid Cells Are Ubiquitous in Neural Networks Songlin Li1†, Yangdong Deng2*†, Zhihua Wang1 1 Department of Microelectronics and Nanoelectronics, Tsinghua University 2 School of Software, Tsinghua University * Corresponding author: Email [email protected] † The two authors contributed equally to this work. Abstract: Grid cells are believed to play an important role in both spatial and non-spatial cognition tasks. A recent study observed the emergence of grid cells in an LSTM for path integration. The connection between biological and artificial neural networks underlying the seemingly similarity, as well as the application domain of grid cells in deep neural networks (DNNs), expect further exploration. This work demonstrated that grid cells could be replicated in either pure vision based or vision guided path integration DNNs for navigation under a proper setting of training parameters. We also show that grid-like behaviors arise in feedforward DNNs for non-spatial tasks. Our findings support that the grid coding is an effective representation for both biological and artificial networks. Introduction: It has been long hypothesized that animals use a “cognitive map”1, namely, an internal knowledge representation to support intelligent behaviors. This proposal was later proved by neuroscience experiments on both spatial2,3 and non-spatial4,5 cognition tasks. Grid cells, which exhibit a spatial periodic firing pattern and thus constitute the hexagonal spatial representation as Fyhn et al has observed2, were discovered in the medial entorhinal cortex (MEC) of rodents2,3. Subsequent studies proposed models to characterize the behavior of grid cells in terms of spike-timing correlations6-8. The discovery of grid cells as well as the fact that different grid cells forms a multi-scale representation inspired the theory of vector-based navigation9. -

Marine Vehicles Localization Using Grid Cells for Path Integration
Marine Vehicles Localization Using Grid Cells for Path Integration Ignacio Carluchoa, Manuel F. Baileya, Mariano De Paulab, Corina Barbalataa [email protected], [email protected], mariano.depaula@fio.unicen.edu.ar, [email protected] a Department of Mechanical Engineering, Louisiana State University, Baton Rouge, USA b INTELYMEC Group, Centro de Investigaciones en F´ısica e Ingenier´ıa del Centro CIFICEN – UNICEN – CICpBA – CONICET, 7400 Olavarr´ıa, Argentina Abstract—Autonomous Underwater Vehicles (AUVs) are plat- forms used for research and exploration of marine environments. However, these types of vehicles face many challenges that hinder their widespread use in the industry. One of the main limitations is obtaining accurate position estimation, due to the lack of GPS signal underwater. This estimation is usually done with Kalman filters. However, new developments in the neuroscience field have shed light on the mechanisms by which mammals are able to obtain a reliable estimation of their current position based on external and internal motion cues. A new type of neuron, called Grid cells, has been shown to be part of path integration system in the brain. In this article, we show how grid cells can be used for obtaining a position estimation of underwater vehicles. The model of grid cells used requires only the linear velocities together with heading orientation and provides a reliable estimation of the vehicle’s position. We provide simulation results for an AUV which show the feasibility of our proposed methodology. Index Terms—Grid cells, Navigation, Neuro inspired agents, Autonomous underwater vehicles Fig. 1. A modified BlueROV2 used for experiments I. INTRODUCTION In recent years, the interest in exploring our oceans has that strongly correlates with the animal position in space [5]. -

Representation of Spatial Orientation by the Intrinsic Dynamics of the Head-Direction Cell Ensemble: a Theory
The Journal of Neuroscience, March 15, 1996, 16(6):2112-2126 Representation of Spatial Orientation by the Intrinsic Dynamics of the Head-Direction Cell Ensemble: A Theory Kechen Zhang Department of Cognitive Science, University of California at San Diego, La Jolla, California 92093-05 15 The head-direction (HD) cells found in the limbic system in disturbances to its shape, and the shift speed can be controlled freely moving rats represent the instantaneous head direction accurately by the strength of the odd-weight component. The of the animal in the horizontal plane regardless of the location generic formulation of the shift mechanism is determined of the animal. The internal direction represented by these cells uniquely within the current theoretical framework. The attractor uses both self-motion information for inet-tially based updating dynamics of the system ensures modality-independence of the and familiar visual landmarks for calibration. Here, a model of internal representation and facilitates the correction for cumu- the dynamics of the HD cell ensemble is presented. The sta- lative error by the putative local-view detectors. The model bility of a localized static activity profile in the network and a offers a specific one-dimensional example of a computational dynamic shift mechanism are explained naturally by synaptic mechanism in which a truly world-centered representation can weight distribution components with even and odd symmetry, be derived from observer-centered sensory inputs by integrat- respectively. Under symmetric weights or symmetric reciprocal ing self-motion information. connections, a stable activity profile close to the known direc- Key words: head-direction cell; spatial orientation; attractor tional tuning curves will emerge. -

Emergence of Grid-Like Representations by Training
Published as a conference paper at ICLR 2018 EMERGENCE OF GRID-LIKE REPRESENTATIONS BY TRAINING RECURRENT NEURAL NETWORKS TO PERFORM SPATIAL LOCALIZATION Christopher J. Cueva,∗ Xue-Xin Wei∗ Columbia University New York, NY 10027, USA fccueva,[email protected] ABSTRACT Decades of research on the neural code underlying spatial navigation have re- vealed a diverse set of neural response properties. The Entorhinal Cortex (EC) of the mammalian brain contains a rich set of spatial correlates, including grid cells which encode space using tessellating patterns. However, the mechanisms and functional significance of these spatial representations remain largely mysterious. As a new way to understand these neural representations, we trained recurrent neural networks (RNNs) to perform navigation tasks in 2D arenas based on veloc- ity inputs. Surprisingly, we find that grid-like spatial response patterns emerge in trained networks, along with units that exhibit other spatial correlates, including border cells and band-like cells. All these different functional types of neurons have been observed experimentally. The order of the emergence of grid-like and border cells is also consistent with observations from developmental studies. To- gether, our results suggest that grid cells, border cells and others as observed in EC may be a natural solution for representing space efficiently given the predominant recurrent connections in the neural circuits. 1 INTRODUCTION Understanding the neural code in the brain has long been driven by studying feed-forward -

Models of Grid Cells and Theta Oscillations
BRIEF COMMUNICATIONS ARISING Models of grid cells and theta oscillations ARISING FROM M. M.Yartsev, M. P. Witter & N. Ulanovsky Nature 479, 103–107 (2011) Grid cells recorded in the medial entorhinal cortex (MEC) of freely and in putative velocity-controlled oscillatory inputs identified as inter- moving rodents show a markedly regular spatial firing pattern whose neurons within the septohippocampal circuit7. underlying mechanism has been the subject of intense interest. Yartsev et al.1 recorded the firing of grid cells from bats trained to Yartsev et al.1 report that the firing of grid cells in crawling bats does crawl within the recording environment, a behaviour that they per- not show theta rhythmicity ‘‘causally disproving a major class of form very slowly (a mean speed of 3.7 cm s21 versus 17.6 cm s21 in computational models’’ of grid cell firing that rely on oscillatory our rat data), often stopping entirely (supplementary figure 11 in interference2–7. However, their data may be consistent with these ref. 1). The authors found grid cells with very low firing rates (a mean models, with the apparent lack of theta rhythmicity reflecting slow peak rate of 0.56 Hz versus 5.14 Hz in our data) and little significant movement speeds and low firing rates. Thus, the conclusion of theta modulation. However, matching movement speed is important Yartsev et al. is not supported by their data. for comparisons involving theta. At low speeds movement-related In oscillatory interference models, path integration is performed by theta rhythmicity is strongly attenuated12 and the need for path velocity-dependent variation in the frequencies of theta-band oscilla- integration is reduced. -

The Brain Compass: a Perspective on How Self-Motion Updates the Head Direction Cell Attractor
bioRxiv preprint doi: https://doi.org/10.1101/189464; this version posted September 17, 2017. The copyright holder for this preprint (which was not certified by peer review) is the author/funder, who has granted bioRxiv a license to display the preprint in perpetuity. It is made available under aCC-BY-NC-ND 4.0 International license. The brain compass: a perspective on how self-motion updates the head direction cell attractor Jean Laurens, Dora E. Angelaki Dept. of Neuroscience, Baylor College of Medicine, Houston, TX, 77030, USA This study was supported by National Institutes of Health grants R21 NS098146 and R01- DC004260. Address for correspondence: Angelaki, Dora Department of Neuroscience Baylor College of Medicine One Baylor Plaza Houston, TX 77030 Office: (713) 798-1469 E-mail: [email protected] ABSTRACT Head Direction cells form an internal compass that signals head azimuth orientation even in the absence of visual landmarks. It is well accepted that head direction properties are generated through a ring attractor that is updated using rotation self-motion cues. The properties and origin of this self-motion velocity drive remain, however, unknown. We propose a unified, quantitative framework whereby the attractor velocity input represents a multisensory self-motion estimate computed through an internal model that uses sensory prediction error based on vestibular, visual, and somatosensory cues to improve on-line motor drive. We show how context- dependent strength of recurrent connections within the attractor itself, rather than the self- motion input, explain differences in head direction cell firing between free foraging and restrained movements. We also summarize recent findings on how head tilt relative to gravity influences the azimuth coding of head direction cells, and explain why and how these effects reflect an updating self-motion velocity drive that is not purely egocentric. -

Head Direction Cells: Properties and Functional Significance Robert U Mullet-L, James B Ranck Jr* and Jeffrey S Taubea
196 Head direction cells: properties and functional significance Robert U Mullet-l, James B Ranck Jr* and Jeffrey S Taubea The strong signal carried by head direction cells in the Under all known circumstances, postsubicular HD cells, postsubiculum complements the positional signal carried the first class to be discovered, discharge only as a by hippocampal place cells; together, the directional and function of the direction in which the rat’s head points positional signals provide the information necessary to permit in the horizontal plane, independent of head location. rats to generate and carry out intelligent, efficient solutions Postsubicular HD cell discharge is rapid only when the to spatial problems. Our opinion is that the hippocampal head points in an -90” sector of headings centered on a positional system acts as a cognitive map and that the role ‘preferred direction’. The relationship between direction of the directional system is to put the map into register with and discharge rate is steep; the function is triangular, the environment. In this way, paths found using the map can so that firing rate decreases linearly in both directions be properly executed. Head direction cells have recently been away from the preferred direction, to be nearly zero when discovered in parts of the thalamus reciprocally connected 45” away from the peak [2,3’]. In contrast to place cells, with the postsubiculum; such cells provide important clues to the reliability of postsubicular HD cell firing is very the organization of the directional system. high. (Some of the properties of HD cells are shown in Figure 2c.) Addresses tg2Department of Physiology, SUNY Health Science Center at In this review, we will first briefly recapitulate what is Brooklyn, 450 Clarkson Avenue, Brooklyn, New York 11203, USA known about HD cells (also called directional cells), t e-mail: [email protected] and then summarize what has been learned about them se-mail: [email protected] during the past two years. -

Resonating Neurons Stabilize Heterogeneous Grid-Cell Networks
bioRxiv preprint doi: https://doi.org/10.1101/2020.12.10.419200; this version posted December 11, 2020. The copyright holder for this preprint (which was not certified by peer review) is the author/funder. All rights reserved. No reuse allowed without permission. 1 Resonating neurons stabilize heterogeneous grid-cell networks 2 3 Divyansh Mittal and Rishikesh Narayanan* 4 5 Cellular Neurophysiology Laboratory, Molecular Biophysics Unit, Indian Institute of 6 Science, Bangalore, India. 7 8 *Corresponding Author 9 10 Rishikesh Narayanan, Ph.D. 11 Molecular Biophysics Unit 12 Indian Institute of Science 13 Bangalore 560 012, India. 14 15 e-mail: [email protected] 16 Phone: +91-80-22933372 17 Fax: +91-80-23600535 18 Number of words: 250 (abstract), 120 (significance statement) 19 20 Abbreviated title: Resonating neurons stabilize heterogeneous networks 21 22 Keywords: grid cells, entorhinal cortex, continuous attractor network, resonance, 23 heterogeneities 24 25 Author contributions 26 D. M. and R. N. designed experiments; D. M. performed experiments and carried out data 27 analysis; D. M. and R. N. co-wrote the paper. 28 29 Competing financial interests 30 The authors declare no conflict of interest. 31 32 Acknowledgments 33 This work was supported by the Wellcome Trust-DBT India Alliance (Senior fellowship to 34 RN; IA/S/16/2/502727), Human Frontier Science Program (HFSP) Organization (RN), the 35 Department of Biotechnology through the DBT-IISc partnership program (RN), the Revati 36 and Satya Nadham Atluri Chair Professorship (RN), and the Ministry of Human Resource 37 Development (RN & DM). The authors thank Dr. Poonam Mishra, Dr. -

Models of Grid Cells and Theta Oscillations
Publisher: NPG; Journal: Nature: Nature; Article Type: BCA DOI: 10.1038/nature11276 Models of grid cells and theta oscillations ARISING FROM M. M.Yartsev, M. P. Witter & N. Ulanovsky Nature 479, 103–107 (2011) Grid cells recorded in the medial entorhinal cortex (MEC) of freely moving rodents show a strikingly regular spatial firing pattern whose underlying mechanism has been the subject of intense interest. Yartsev et al.1 report that the firing of grid cells in crawling bats does not show theta rhythmicity “causally disproving a major class of computational models” of grid cell firing that rely on oscillatory interference2–7. However, their data may be consistent with these models, with the apparent lack of theta rhythmicity reflecting slow movement speeds and low firing rates. Thus, Yartsev et al.’s conclusion is not supported by their data. In oscillatory interference models, path integration is performed by velocity- dependent variation in the frequencies of theta-band oscillations, which combine to generate the grid-cell pattern2–4,6,7. In addition, learned associations to environmental sensory inputs (possibly mediated by place cells) ensure that grids are spatially stable over time and are sufficient to maintain firing in familiar environments2,3,8. In rats, the majority of grid cells show theta-modulated firing9,10, and the model predicts specific relationships between modulation frequency, running velocity and grid scale4, which have been verified in grid cells11 and in putative velocity-controlled oscillatory inputs identified as interneurons within the septohippocampal circuit7. Yartsev et al.1 recorded the firing of grid cells from bats trained to crawl within the recording environment, a behaviour that they perform very slowly (a mean speed of 3.7 cm s−1 versus 17.6 cm s−1 in our rat data), often stopping entirely (supplementary figure 11 in ref. -

May-Britt Moser Norwegian University of Science and Technology (NTNU), Trondheim, Norway
Grid Cells, Place Cells and Memory Nobel Lecture, 7 December 2014 by May-Britt Moser Norwegian University of Science and Technology (NTNU), Trondheim, Norway. n 7 December 2014 I gave the most prestigious lecture I have given in O my life—the Nobel Prize Lecture in Medicine or Physiology. Afer lectures by my former mentor John O’Keefe and my close colleague of more than 30 years, Edvard Moser, the audience was still completely engaged, wonderful and responsive. I was so excited to walk out on the stage, and proud to present new and exciting data from our lab. Te title of my talk was: “Grid cells, place cells and memory.” Te long-term vision of my lab is to understand how higher cognitive func- tions are generated by neural activity. At frst glance, this seems like an over- ambitious goal. President Barack Obama expressed our current lack of knowl- edge about the workings of the brain when he announced the Brain Initiative last year. He said: “As humans, we can identify galaxies light years away; we can study particles smaller than an atom. But we still haven’t unlocked the mystery of the three pounds of matter that sits between our ears.” Will these mysteries remain secrets forever, or can we unlock them? What did Obama say when he was elected President? “Yes, we can!” To illustrate that the impossible is possible, I started my lecture by showing a movie with a cute mouse that struggled to bring a biscuit over an edge and home to its nest. Te biscuit was almost bigger than the mouse itself. -

Neuronal Properties and Synaptic Connectivity in Rodent Presubiculum Jean Simonnet
Neuronal properties and synaptic connectivity in rodent presubiculum Jean Simonnet To cite this version: Jean Simonnet. Neuronal properties and synaptic connectivity in rodent presubiculum. Neurons and Cognition [q-bio.NC]. Université Pierre et Marie Curie - Paris VI, 2014. English. NNT : 2014PA066435. tel-02295014 HAL Id: tel-02295014 https://tel.archives-ouvertes.fr/tel-02295014 Submitted on 24 Sep 2019 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. THÈSE DE DOCTORAT DE L’UNIVERSITÉ PIERRE ET MARIE CURIE Spécialité Neurosciences École doctorale Cerveau – Cognition – Comportement Présentée par : Jean Simonnet Pour obtenir le grade de DOCTEUR DE L’UNIVERSITÉ PIERRE ET MARIE CURIE Sujet de la thèse : Neuronal properties and synaptic connectivity in rodent presubiculum Soutenue le 23.09.2014 devant le jury composé de : Dr Jean-Christophe Poncer Président Dr Dominique Debanne Rapporteur Dr Maria Cecilia Angulo Rapportrice Pr Hannah Monyer Examinatrice Dr Bruno Cauli Examinateur Dr Desdemona Fricker Directrice de thèse Université Pierre & Marie Curie - Paris 6 Tél. Secrétariat : 01 42 34 68 35 Bureau d’accueil, inscription des doctorants Fax : 01 42 34 68 40 et base de données Tél. pour les étudiants de A à EL : 01 42 34 68 41 Esc. -

Encoding of 3D Head Direction Information in the Human Brain
Received: 31 May 2018 Revised: 30 October 2018 Accepted: 26 November 2018 DOI: 10.1002/hipo.23060 RESEARCH ARTICLE Encoding of 3D head direction information in the human brain Misun Kim | Eleanor A. Maguire Wellcome Centre for Human Neuroimaging, Queen Square Institute of Neurology, Abstract University College London, London, United Head direction cells are critical for navigation because they convey information about which Kingdom direction an animal is facing within an environment. To date, most studies on head direction Correspondence encoding have been conducted on a horizontal two-dimensional (2D) plane, and little is known Eleanor Maguire, Wellcome Centre for Human Neuroimaging, Queen Square Institute of about how three-dimensional (3D) direction information is encoded in the brain despite humans Neurology, University College London, and other animals living in a 3D world. Here, we investigated head direction encoding in the 12 Queen Square, London WC1N 3AR, United human brain while participants moved within a virtual 3D “spaceship” environment. Movement Kingdom. was not constrained to planes and instead participants could move along all three axes in volu- Email: [email protected] metric space as if in zero gravity. Using functional magnetic resonance imaging (fMRI) multivoxel Funding information Wellcome, Grant/Award Numbers: 101759/ pattern similarity analysis, we found evidence that the thalamus, particularly the anterior por- Z/13/Z, 102263/Z/13/Z, 203147/Z/16/Z; tion, and the subiculum encoded the horizontal component of 3D head direction (azimuth). In Samsung Scholarship contrast, the retrosplenial cortex was significantly more sensitive to the vertical direction (pitch) than to the azimuth.