A Review of Basic Snow Mechanics Malcolm Mellor
Total Page:16
File Type:pdf, Size:1020Kb

Load more
Recommended publications
-

Remarks on the Current Theory of Shear Strength of Variable Depth Beams A
28 The Open Civil Engineering Journal, 2009, 3, 28-33 Open Access Remarks on the Current Theory of Shear Strength of Variable Depth Beams A. Paglietti* and G. Carta Department of Structural Engineering, University of Cagliari, Italy Abstract: Though still in use today, the method of the effective shearing force to evaluate the maximum shear stress in variable depth beams does not stand close scrutiny. It can lead to overestimating the shearing strength of these beams, al- though it is suggested as a viable procedure by many otherwise excellent codes of practice worldwide. This paper should help to put the record straight. It should warn the practitioner against the general inadequacy of such a method and prompt the drafters of structural concrete codes of practice into acting to eliminate this erroneous though persisting designing pro- cedure. Key Words: Variable depth beams, Effective shearing force, Tapered beams, Building codes. INTRODUCTION to a sloped side of the beam. Accordingly, the component of such a force which is normal to the beam axis is supposed to The three simply supported beams shown in Fig. (1) all increase or decrease the internal shear needed to equilibrate have the same span and carry the same load. Their shape is the shearing force acting at the considered cross section. This different, though. Beam (a) is a constant depth beam, while is what is stated, almost literally, in Sect. R 11.1.1.2 of the beams (b) and (c) are just two different instances of a vari- American Concrete Institute Code [1] and represents the able depth beam. -

1 Portraits Leonhard Euler Daniel Bernoulli Johann-Heinrich Lambert
Portraits Leonhard Euler Daniel Bernoulli Johann-Heinrich Lambert Compiled and translated by Oscar Sheynin Berlin, 2010 Copyright Sheynin 2010 www.sheynin.de ISBN 3-938417-01-3 1 Contents Foreword I. Nicolaus Fuss, Eulogy on Leonhard Euler, 1786. Translated from German II. M. J. A. N. Condorcet, Eulogy on Euler, 1786. Translated from French III. Daniel Bernoulli, Autobiography. Translated from Russian; Latin original received in Petersburg in 1776 IV. M. J. A. N. Condorcet, Eulogy on [Daniel] Bernoulli, 1785. In French. Translated by Daniel II Bernoulli in German, 1787. This translation considers both versions V. R. Wolf, Daniel Bernoulli from Basel, 1700 – 1782, 1860. Translated from German VI. Gleb K. Michajlov, The Life and Work of Daniel Bernoullli, 2005. Translated from German VII. Daniel Bernoulli, List of Contributions, 2002 VIII. J. H. S. Formey, Eulogy on Lambert, 1780. Translated from French IX. R. Wolf, Joh. Heinrich Lambert from Mühlhausen, 1728 – 1777, 1860. Translated from German X. J.-H. Lambert, List of Publications, 1970 XI. Oscar Sheynin, Supplement: Daniel Bernoulli’s Instructions for Meteorological Stations 2 Foreword Along with the main eulogies and biographies [i, ii, iv, v, viii, ix], I have included a recent biography of Daniel Bernoulli [vi], his autobiography [iii], for the first time translated from the Russian translation of the Latin original but regrettably incomplete, and lists of published works by Daniel Bernoulli [vii] and Lambert [x]. The first of these lists is readily available, but there are so many references to the works of these scientists in the main texts, that I had no other reasonable alternative. -

New General Principle of Mechanics and Its Application to General Nonideal Nonholonomic Systems
New General Principle of Mechanics and Its Application to General Nonideal Nonholonomic Systems Firdaus E. Udwadia1 Abstract: In this paper we develop a general minimum principle of analytical dynamics that is applicable to nonideal constraints. The new principle encompasses Gauss’s Principle of Least Constraint. We use this principle to obtain the general, explicit, equations of motion for holonomically and/or nonholonomically constrained systems with non-ideal constraints. Examples of a nonholonomically constrained system where the constraints are nonideal, and of a system with sliding friction, are presented. DOI: 10.1061/͑ASCE͒0733-9399͑2005͒131:4͑444͒ CE Database subject headings: Constraints; Equations of motion; Mechanical systems; Friction. Introduction ments. Such systems have, to date, been left outside the perview of the Lagrangian framework. As stated by Goldstein ͑1981, p. The motion of complex mechanical systems is often mathemati- 14͒ “This ͓total work done by forces of constraint equal to zero͔ cally modeled by what we call their equations of motion. Several is no longer true if sliding friction is present, and we must exclude formalisms ͓Lagrange’s equations ͑Lagrange 1787͒, Gibbs– such systems from our ͓Lagrangian͔ formulation.” And Pars Appell equations ͑Gibbs 1879, Appell 1899͒, generalized inverse ͑1979͒ in his treatise on analytical dynamics writes, “There are in equations ͑Udwadia and Kalaba 1992͔͒ have been developed for fact systems for which the principle enunciated ͓D’Alembert’s obtaining the equations of motion for such structural and me- principle͔… does not hold. But such systems will not be consid- chanical systems. Though these formalisms do not all afford the ered in this book.” Newtonian approaches are usually used to deal same ease of use in any given practical situation, they are equiva- with the problem of sliding friction ͑Goldstein 1981͒. -

On Stability Problem of a Top Rendiconti Del Seminario Matematico Della Università Di Padova, Tome 68 (1982), P
RENDICONTI del SEMINARIO MATEMATICO della UNIVERSITÀ DI PADOVA V. V. RUMJANTSEV On stability problem of a top Rendiconti del Seminario Matematico della Università di Padova, tome 68 (1982), p. 119-128 <http://www.numdam.org/item?id=RSMUP_1982__68__119_0> © Rendiconti del Seminario Matematico della Università di Padova, 1982, tous droits réservés. L’accès aux archives de la revue « Rendiconti del Seminario Matematico della Università di Padova » (http://rendiconti.math.unipd.it/) implique l’accord avec les conditions générales d’utilisation (http://www.numdam.org/conditions). Toute utilisation commerciale ou impression systématique est constitutive d’une infraction pénale. Toute copie ou impression de ce fichier doit conte- nir la présente mention de copyright. Article numérisé dans le cadre du programme Numérisation de documents anciens mathématiques http://www.numdam.org/ On Stability Problem of a Top. V. V. RUMJANTSEV (*) This paper deals with the stability of a heavy gyrostate [1] on a horizontal plane. The gyrostate is considered as a rigid body with a rotor rotating freely (without friction) about an axis invariably con- nected with the body leaning on a plane by a convex surface, i.e. the top in a broad sence of this word. For mechanician the top is a symple and principal object of study [2] attracting investigators’ attention. 1. Let $ql be the fixed coordinate system with the origin in some point of a horizontal plane and vertically up directed axis I with unit vector y; OXIX2Xa is the coordinate system rigidly connected with the body with the origin in centre of mass of gyrostate and axis ~3 coincided with one of its principal central axes of inertia. -

On the Foundations of Analytical Dynamics F.E
International Journal of Non-Linear Mechanics 37 (2002) 1079–1090 On the foundations of analytical dynamics F.E. Udwadiaa; ∗, R.E. Kalabab aAerospace and Mechanical Engineering, Civil Engineering, Mathematics, and Information and Operations Management, 430K Olin Hall, University of Southern California, Los Angeles, CA 90089-1453, USA bBiomedical Engineering and Economics, University of Southern California, Los Angeles, CA 90089, USA Abstract In this paper, we present the general structure for the explicit equations of motion for general mechanical systems subjected to holonomic and non-holonomic equality constraints. The constraints considered here need not satisfy D’Alembert’s principle, and our derivation is not based on the principle of virtual work. Therefore, the equations obtained here have general applicability. They show that in the presence of such constraints, the constraint force acting on the systemcan always be viewed as madeup of the sumof two components.The explicit formfor each of the two components is provided. The ÿrst of these components is the constraint force that would have existed, were all the constraints ideal; the second is caused by the non-ideal nature of the constraints, and though it needs speciÿcation by the mechanician and depends on the particular situation at hand, this component nonetheless has a speciÿc form. The paper also provides a generalized formof D’Alembert’sprinciple which is then used to obtain the explicit equations of motion for constrained mechanical systems where the constraints may be non-ideal. We show an example where the new general, explicit equations of motion obtained in this paper are used to directly write the equations of motion for describing a non-holonomically constrained system with non-ideal constraints. -

Enghandbook.Pdf
785.392.3017 FAX 785.392.2845 Box 232, Exit 49 G.L. Huyett Expy Minneapolis, KS 67467 ENGINEERING HANDBOOK TECHNICAL INFORMATION STEELMAKING Basic descriptions of making carbon, alloy, stainless, and tool steel p. 4. METALS & ALLOYS Carbon grades, types, and numbering systems; glossary p. 13. Identification factors and composition standards p. 27. CHEMICAL CONTENT This document and the information contained herein is not Quenching, hardening, and other thermal modifications p. 30. HEAT TREATMENT a design standard, design guide or otherwise, but is here TESTING THE HARDNESS OF METALS Types and comparisons; glossary p. 34. solely for the convenience of our customers. For more Comparisons of ductility, stresses; glossary p.41. design assistance MECHANICAL PROPERTIES OF METAL contact our plant or consult the Machinery G.L. Huyett’s distinct capabilities; glossary p. 53. Handbook, published MANUFACTURING PROCESSES by Industrial Press Inc., New York. COATING, PLATING & THE COLORING OF METALS Finishes p. 81. CONVERSION CHARTS Imperial and metric p. 84. 1 TABLE OF CONTENTS Introduction 3 Steelmaking 4 Metals and Alloys 13 Designations for Chemical Content 27 Designations for Heat Treatment 30 Testing the Hardness of Metals 34 Mechanical Properties of Metal 41 Manufacturing Processes 53 Manufacturing Glossary 57 Conversion Coating, Plating, and the Coloring of Metals 81 Conversion Charts 84 Links and Related Sites 89 Index 90 Box 232 • Exit 49 G.L. Huyett Expressway • Minneapolis, Kansas 67467 785-392-3017 • Fax 785-392-2845 • [email protected] • www.huyett.com INTRODUCTION & ACKNOWLEDGMENTS This document was created based on research and experience of Huyett staff. Invaluable technical information, including statistical data contained in the tables, is from the 26th Edition Machinery Handbook, copyrighted and published in 2000 by Industrial Press, Inc. -

Recent Advances in Multi-Body Dynamics and Nonlinear Control
Recent Advances in Multi-body Dynamics and Nonlinear Control Recent Advances in Multi-body Firdaus E. Udwadia Dynamics and Nonlinear Control Aerospace and Mechanical Engineering This paper presents some recent advances in the dynamics and control of constrained Civil Engineering,, Mathematics multi-body systems. The constraints considered need not satisfy D’Alembert’s principle Systems Architecture Engineering and therefore the results are of general applicability. They show that in the presence of and Information and Operations Management constraints, the constraint force acting on the multi-body system can always be viewed as University of Southern California, Los Angeles made up of the sum of two components whose explicit form is provided. The first of these CA 90089-1453 components consists of the constraint force that would have existed were all the [email protected] constraints ideal; the second is caused by the non-ideal nature of the constraints, and though it needs specification by the mechanician who is modeling the specific system at hand, it nonetheless has a specific form. The general equations of motion obtained herein provide new insights into the simplicity with which Nature seems to operate. They are shown to provide new and exact methods for the tracking control of highly nonlinear mechanical and structural systems without recourse to the usual and approximate methods of linearization that are commonly in use. Keywords : Constrained motion, multi-body dynamics, explicit equations of motion, exact tracking control of nonlinear systems In this paper we extend these results along two directions. First, Introduction we extend D’Alembert’s Principle to include constraints that may be, in general, non-ideal so that the forces of constraint may The general problem of obtaining the equations of motion of a therefore do positive, negative, or zero work under virtual constrained discrete mechanical system is one of the central issues displacements at any given instant of time during the motion of the in multi-body dynamics. -

Bending and Shear Analysis and Design of Ductile Steel Plate Walls
13th World Conference on Earthquake Engineering Vancouver, B.C., Canada August 1-6, 2004 Paper No. 77 BENDING AND SHEAR ANALYSIS AND DESIGN OF DUCTILE STEEL PLATE WALLS Mehdi H. K. KHARRAZI1, Carlos E. VENTURA2, Helmut G. L. PRION3 and Saeid SABOURI-GHOMI 4 SUMMARY For the past few decades global attention and interest has grown in the application of Ductile Steel Plate Walls (DSPW) for building lateral load resisting systems. Advantages of using DSPWs in a building as lateral force resisting system compromise stable hysteretic characteristics, high plastic energy absorption capacity and enhanced stiffness, strength and ductility. A significant number of experimental and analytical studies have been carried out to establish analysis and design methods for such lateral resisting systems, however, there is still a need for a general analysis and design methodology that not only accounts for the interaction of the plates and the framing system but also can be used to define the yield and ultimate resistance capacity of the DSPW in bending and shear combination. In this paper an analytical model of the DSPW that characterizes the structural capacity in the shear and bending interaction is presented and discussed. This proposed model provides a good understanding of how the different components of the system interact, and is able to properly represent the system's overall hysteretic characteristics. The paper also contributes to better understand the structural capacity of the DPSW and of the shear and bending interaction. The simplicity of the method permits it to be readily incorporated in practical non-linear dynamic analyses of buildings with DSPWs. -

USE of HIGH-STRENGTH STEEL REINFORCEMENT in SHEAR FRICTION APPLICATIONS by Gabriel Augusto Zeno B.S. in Civil Engineering, Univ
USE OF HIGH-STRENGTH STEEL REINFORCEMENT IN SHEAR FRICTION APPLICATIONS by Gabriel Augusto Zeno B.S. in Civil Engineering, University of Puerto Rico at Mayagüez, 2005 Submitted to the Graduate Faculty of Swanson School of Engineering in partial fulfillment of the requirements for the degree of Master of Science University of Pittsburgh 2009 UNIVERSITY OF PITTSBURGH SWANSON SCHOOL OF ENGINEERING This thesis was presented by Gabriel Augusto Zeno It was defended on October 21, 2009 and approved by Dr. John Brigham, Assistant Professor, Civil and Environmental Engineering Dr. Julie Vandenbossche, Assistant Professor, Civil and Environmental Engineering Thesis Advisor: Dr. Kent A. Harries, Associate Professor, Civil and Environmental Engineering ii Copyright © by Gabriel Augusto Zeno 2009 iii USE OF HIGH-STRENGTH STEEL REINFORCEMENT IN SHEAR FRICTION APPLICATIONS Gabriel Augusto Zeno, M.S. University of Pittsburgh, 2009 This thesis reports the results of a study associated with Task 8.4b of the National Cooperative Highway Research Program (NCHRP) Project 12-77 Structural Concrete Design with High-Strength Steel Reinforcement. The objective of the study is to evaluate the effects of the use of high-strength steel reinforcement in shear friction applications. Shear friction is the mechanism present when shear is transferred across an interface between two concrete members that can slip relative to one another. It arises from the roughness of the interface and the clamping force created by the steel reinforcement across it. The study was accomplished by testing typical push-off specimens with a cold joint test interface, which had a surface roughness with at least ¼-inch amplitude in order to simulate the connection between a composite slab and an AASHTO girder. -
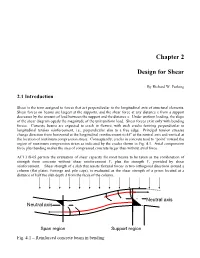
Chapter 2 Design for Shear
Chapter 2 Design for Shear By Richard W. Furlong 2.1 Introduction Shear is the term assigned to forces that act perpendicular to the longitudinal axis of structural elements. Shear forces on beams are largest at the supports, and the shear force at any distance x from a support decreases by the amount of load between the support and the distance x. Under uniform loading, the slope of the shear diagram equals the magnitude of the unit uniform load. Shear forces exist only with bending forces. Concrete beams are expected to crack in flexure, with such cracks forming perpendicular to longitudinal tension reinforcement, i.e., perpendicular also to a free edge. Principal tension stresses change direction from horizontal at the longitudinal reinforcement to 45o at the neutral axis and vertical at the location of maximum compression stress. Consequently, cracks in concrete tend to “point” toward the region of maximum compression stress as indicated by the cracks shown in Fig. 4.1. Axial compression force plus bending makes the area of compressed concrete larger than without axial force. ACI 318-05 permits the evaluation of shear capacity for most beams to be taken as the combination of strength from concrete without shear reinforcement Vc plus the strength Vs provided by shear reinforcement. Shear strength of a slab that resists flexural forces in two orthogonal directions around a column (flat plates, footings and pile caps), is evaluated as the shear strength of a prism located at a distance of half the slab depth d from the faces of the column. Neutral axis Neutral axis Span region Support region Fig. -

Explicit Equations of Motion for Constrained
Explicit equations of motion for constrained mechanical systems with singular mass matrices and applications to multi-body dynamics Firdaus Udwadia, Phailaung Phohomsiri To cite this version: Firdaus Udwadia, Phailaung Phohomsiri. Explicit equations of motion for constrained mechanical systems with singular mass matrices and applications to multi-body dynamics. Proceedings of the Royal Society A: Mathematical, Physical and Engineering Sciences, Royal Society, The, 2006, 462 (2071), pp.2097 - 2117. 10.1098/rspa.2006.1662. hal-01395968 HAL Id: hal-01395968 https://hal.archives-ouvertes.fr/hal-01395968 Submitted on 13 Nov 2016 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Distributed under a Creative Commons Attribution| 4.0 International License Explicit equations of motion for constrained mechanical systems with singular mass matrices and applications to multi-body dynamics 1 2 FIRDAUS E. UDWADIA AND PHAILAUNG PHOHOMSIRI 1Civil Engineering, Aerospace and Mechanical Engineering, Mathematics, and Information and Operations Management, and 2Aerospace and Mechanical Engineering, University of Southern California, Los Angeles, CA 90089, USA We present the new, general, explicit form of the equations of motion for constrained mechanical systems applicable to systems with singular mass matrices. The systems may have holonomic and/or non holonomic constraints, which may or may not satisfy D’Alembert’s principle at each instant of time. -

Bolted Joint Design
Bolted Joint Design There is no one fastener material that is right for every environment. Selecting the right fastener material from the vast array of those available can be a daunting task. Careful consideration must be given to strength, temperature, corrosion, vibration, fatigue, and many other variables. However, with some basic knowledge and understanding, a well thought out evaluation can be made. Mechanical Properties of Steel Fasteners in Service Most fastener applications are designed to support or transmit some form of externally applied load. If the strength of the fastener is the only concern, there is usually no need to look beyond carbon steel. Considering the cost of raw materials, non-ferrous metals should be considered only when a special application is required. Tensile strength is the mechanical property most widely associated with standard threaded fasteners. Tensile strength is the maximum tension-applied load the fastener can support prior to fracture. The tensile load a fastener can withstand is determined by the formula P = St x As . • P= Tensile load– a direct measurement of clamp load (lbs., N) • St= Tensile strength– a generic measurement of the material’s strength (psi, MPa). • As= Tensile stress area for fastener or area of material (in 2, mm 2) To find the tensile strength of a particular P = St x As bolt, you will need to refer to Mechanical P = tensile load St = tensile strength As = tensile stress area Properties of Externally Threaded Fasteners (lbs., N) (psi, MPa) (sq. in, sq. mm) chart in the Fastenal Technical Reference Applied to a 3/4-10 x 7” SAE J429 Grade 5 HCS Guide.