Armv7-M Architecture Reference Manual
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

KDE 2.0 Development, Which Is Directly Supported
23 8911 CH18 10/16/00 1:44 PM Page 401 The KDevelop IDE: The CHAPTER Integrated Development Environment for KDE by Ralf Nolden 18 IN THIS CHAPTER • General Issues 402 • Creating KDE 2.0 Applications 409 • Getting Started with the KDE 2.0 API 413 • The Classbrowser and Your Project 416 • The File Viewers—The Windows to Your Project Files 419 • The KDevelop Debugger 421 • KDevelop 2.0—A Preview 425 23 8911 CH18 10/16/00 1:44 PM Page 402 Developer Tools and Support 402 PART IV Although developing applications under UNIX systems can be a lot of fun, until now the pro- grammer was lacking a comfortable environment that takes away the usual standard activities that have to be done over and over in the process of programming. The KDevelop IDE closes this gap and makes it a joy to work within a complete, integrated development environment, combining the use of the GNU standard development tools such as the g++ compiler and the gdb debugger with the advantages of a GUI-based environment that automates all standard actions and allows the developer to concentrate on the work of writing software instead of managing command-line tools. It also offers direct and quick access to source files and docu- mentation. KDevelop primarily aims to provide the best means to rapidly set up and write KDE software; it also supports extended features such as GUI designing and translation in con- junction with other tools available especially for KDE development. The KDevelop IDE itself is published under the GNU Public License (GPL), like KDE, and is therefore publicly avail- able at no cost—including its source code—and it may be used both for free and for commer- cial development. -

Using the GNU Debugger (Gdb) a Debugger Is a Very Useful Tool for Finding Bugs in a Program
Using the GNU debugger (gdb) A debugger is a very useful tool for finding bugs in a program. You can interact with a program while it is running, start and stop it whenever, inspect the current values of variables and modify them, etc. If your program runs and crashes, it will produce a ‘core dump’. You can also use a debugger to look at the core dump and give you extra information about where the crash happened and what triggered it. Some debuggers (including recent versions of gdb) can also go backwards through your code: you run your code forwards in time to the point of an error, and then go backwards looking at the values of the key variables until you get to the start of the error. This can be slow but useful sometimes! To use a debugger effectively, you need to get the compiler to put extra ‘symbol’ information into the binary, otherwise all it will contain is machine code level – it is much more useful to have the actual variable names you used. To do this, you use: gfortran –g –O0 mycode.f90 –o mybinary where ‘-g’ is the compiler option to include extra symbols, -O0 is no optimization so the code is compiled exactly as written, and the output binary is called ’mybinary’. If the source files and executable file is in the same directory, then you can run the binary through the debugger by simply doing: gdb ./mybinary This will then put you into an interactive debugging session. Most commands can be shortened (eg ‘b’ instead of ‘break’) and pressing ‘enter’ will repeat the last command. -

ARM Architecture
ARM Architecture Comppgzuter Organization and Assembly ygg Languages Yung-Yu Chuang with slides by Peng-Sheng Chen, Ville Pietikainen ARM history • 1983 developed by Acorn computers – To replace 6502 in BBC computers – 4-man VLSI design team – Its simp lic ity comes from the inexper ience team – Match the needs for generalized SoC for reasonable power, performance and die size – The first commercial RISC implemenation • 1990 ARM (Advanced RISC Mac hine ), owned by Acorn, Apple and VLSI ARM Ltd Design and license ARM core design but not fabricate Why ARM? • One of the most licensed and thus widespread processor cores in the world – Used in PDA, cell phones, multimedia players, handheld game console, digital TV and cameras – ARM7: GBA, iPod – ARM9: NDS, PSP, Sony Ericsson, BenQ – ARM11: Apple iPhone, Nokia N93, N800 – 90% of 32-bit embedded RISC processors till 2009 • Used especially in portable devices due to its low power consumption and reasonable performance ARM powered products ARM processors • A simple but powerful design • A whlhole filfamily of didesigns shiharing siilimilar didesign principles and a common instruction set Naming ARM •ARMxyzTDMIEJFS – x: series – y: MMU – z: cache – T: Thumb – D: debugger – M: Multiplier – I: EmbeddedICE (built-in debugger hardware) – E: Enhanced instruction – J: Jazell e (JVM) – F: Floating-point – S: SthiiblSynthesizible version (source code version for EDA tools) Popular ARM architectures •ARM7TDMI – 3 pipe line stages (ft(fetc h/deco de /execu te ) – High code density/low power consumption – One of the most used ARM-version (for low-end systems) – All ARM cores after ARM7TDMI include TDMI even if they do not include TDMI in their labels • ARM9TDMI – Compatible with ARM7 – 5 stages (fe tc h/deco de /execu te /memory /wr ite ) – Separate instruction and data cache •ARM11 ARM family comparison year 1995 1997 1999 2003 ARM is a RISC • RISC: simple but powerful instructions that execute within a single cycle at high clock speed. -

Superh RISC Engine SH-1/SH-2
SuperH RISC Engine SH-1/SH-2 Programming Manual September 3, 1996 Hitachi America Ltd. Notice When using this document, keep the following in mind: 1. This document may, wholly or partially, be subject to change without notice. 2. All rights are reserved: No one is permitted to reproduce or duplicate, in any form, the whole or part of this document without Hitachi’s permission. 3. Hitachi will not be held responsible for any damage to the user that may result from accidents or any other reasons during operation of the user’s unit according to this document. 4. Circuitry and other examples described herein are meant merely to indicate the characteristics and performance of Hitachi’s semiconductor products. Hitachi assumes no responsibility for any intellectual property claims or other problems that may result from applications based on the examples described herein. 5. No license is granted by implication or otherwise under any patents or other rights of any third party or Hitachi, Ltd. 6. MEDICAL APPLICATIONS: Hitachi’s products are not authorized for use in MEDICAL APPLICATIONS without the written consent of the appropriate officer of Hitachi’s sales company. Such use includes, but is not limited to, use in life support systems. Buyers of Hitachi’s products are requested to notify the relevant Hitachi sales offices when planning to use the products in MEDICAL APPLICATIONS. Introduction The SuperH RISC engine family incorporates a RISC (Reduced Instruction Set Computer) type CPU. A basic instruction can be executed in one clock cycle, realizing high performance operation. A built-in multiplier can execute multiplication and addition as quickly as DSP. -
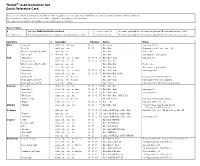
Thumb® 16-Bit Instruction Set Quick Reference Card
Thumb® 16-bit Instruction Set Quick Reference Card This card lists all Thumb instructions available on Thumb-capable processors earlier than ARM®v6T2. In addition, it lists all Thumb-2 16-bit instructions. The instructions shown on this card are all 16-bit in Thumb-2, except where noted otherwise. All registers are Lo (R0-R7) except where specified. Hi registers are R8-R15. Key to Tables § See Table ARM architecture versions. <loreglist+LR> A comma-separated list of Lo registers. plus the LR, enclosed in braces, { and }. <loreglist> A comma-separated list of Lo registers, enclosed in braces, { and }. <loreglist+PC> A comma-separated list of Lo registers. plus the PC, enclosed in braces, { and }. Operation § Assembler Updates Action Notes Move Immediate MOVS Rd, #<imm> N Z Rd := imm imm range 0-255. Lo to Lo MOVS Rd, Rm N Z Rd := Rm Synonym of LSLS Rd, Rm, #0 Hi to Lo, Lo to Hi, Hi to Hi MOV Rd, Rm Rd := Rm Not Lo to Lo. Any to Any 6 MOV Rd, Rm Rd := Rm Any register to any register. Add Immediate 3 ADDS Rd, Rn, #<imm> N Z C V Rd := Rn + imm imm range 0-7. All registers Lo ADDS Rd, Rn, Rm N Z C V Rd := Rn + Rm Hi to Lo, Lo to Hi, Hi to Hi ADD Rd, Rd, Rm Rd := Rd + Rm Not Lo to Lo. Any to Any T2 ADD Rd, Rd, Rm Rd := Rd + Rm Any register to any register. Immediate 8 ADDS Rd, Rd, #<imm> N Z C V Rd := Rd + imm imm range 0-255. -
ARM® Developer Suite Version 1.1
ARM® Developer Suite Version 1.1 Assembler Guide Copyright © 2000 ARM Limited. All rights reserved. ARM DUI 0068A ARM Developer Suite Assembler Guide Copyright © 2000 ARM Limited. All rights reserved. Release Information The following changes have been made to this book. Change History Date Issue Change November 2000 A Release 1.1 Proprietary Notice Words and logos marked with ® or ™ are registered trademarks or trademarks owned by ARM Limited. Other brands and names mentioned herein may be the trademarks of their respective owners. Neither the whole nor any part of the information contained in, or the product described in, this document may be adapted or reproduced in any material form except with the prior written permission of the copyright holder. The product described in this document is subject to continuous developments and improvements. All particulars of the product and its use contained in this document are given by ARM in good faith. However, all warranties implied or expressed, including but not limited to implied warranties of merchantability, or fitness for purpose, are excluded. This document is intended only to assist the reader in the use of the product. ARM Limited shall not be liable for any loss or damage arising from the use of any information in this document, or any error or omission in such information, or any incorrect use of the product. ii Copyright © 2000 ARM Limited. All rights reserved. ARM DUI 0068A Contents Assembler Guide Preface About this book .............................................................................................. vi Feedback ....................................................................................................... ix Chapter 1 Introduction 1.1 About the ARM Developer Suite assemblers .............................................. 1-2 Chapter 2 Writing ARM and Thumb Assembly Language 2.1 Introduction ................................................................................................ -

Realtime Capabilities of Low-End Powerpc and ARM Boards for Embedded Systems
Realtime capabilities of low-end PowerPC and ARM boards for embedded systems Alexander Bauer PHYTEC Messtechnik Gmbh Robert-Koch-Str.39, 55129 Mainz, Germany [email protected] Abstract With the stepwise integration of the Realtime Preemption Patches (RT-Preempt) into the Mainline Linux kernel and their support for architectures other than Intel and AMD, there are now a number of choices which board to use for a particular embedded realtime project running Mainline Linux. In order to select the appropriate processor and clock frequency, it would be desirable to have some generally applicable ranges of worst-case latencies that can be obtained using the various processor types and conditions. We, therefore, determined the internal worst-case latency of PowerPC and ARM boards running Linux 2.6.20 and above patched with RT-Preempt. The PowerPC-board (Phytec phyCORE-MPC5200B) was running at 266 and 400 MHz, the ARM board (Phytec phyCORE-PXA270) was running at 266 and 520 MHz. This article will provide the details of the various measurement set-ups, present the results and discuss them with respect to the design differences between PowerPC and ARM. 1 Introduction This paper presents the results of the latency tests and discusses the results with respect of the different In the embedded market there is a wide range of processor designs. processors to choose from. A processor is typically selected for a customer design because of it features, e.g. video interface and peripherals, and the clock 2 Latency Tests frequency. With the growing importance of Linux and especially realtime Linux for customer designs For the latency tests based on MPC5200 we used in the embedded market, it is also essential to choose the PHYTEC phyCORE MPC5200 board with 400 the right processor that will cope with the realtime MHz as a reference platform. -

Intel® 64 and IA-32 Architectures Software Developer's Manual
Intel® 64 and IA-32 Architectures Software Developer’s Manual Volume 3B: System Programming Guide, Part 2 NOTE: The Intel® 64 and IA-32 Architectures Software Developer's Manual consists of five volumes: Basic Architecture, Order Number 253665; Instruction Set Reference A-M, Order Number 253666; Instruction Set Reference N-Z, Order Number 253667; System Programming Guide, Part 1, Order Number 253668; System Programming Guide, Part 2, Order Number 253669. Refer to all five volumes when evaluating your design needs. Order Number: 253669-029US November 2008 INFORMATION IN THIS DOCUMENT IS PROVIDED IN CONNECTION WITH INTEL PRODUCTS. NO LICENSE, EXPRESS OR IMPLIED, BY ESTOPPEL OR OTHERWISE, TO ANY INTELLECTUAL PROPERTY RIGHTS IS GRANT- ED BY THIS DOCUMENT. EXCEPT AS PROVIDED IN INTEL'S TERMS AND CONDITIONS OF SALE FOR SUCH PRODUCTS, INTEL ASSUMES NO LIABILITY WHATSOEVER AND INTEL DISCLAIMS ANY EXPRESS OR IMPLIED WARRANTY, RELATING TO SALE AND/OR USE OF INTEL PRODUCTS INCLUDING LIABILITY OR WARRANTIES RELATING TO FITNESS FOR A PARTICULAR PURPOSE, MERCHANTABILITY, OR INFRINGEMENT OF ANY PATENT, COPYRIGHT OR OTHER INTELLECTUAL PROPERTY RIGHT. UNLESS OTHERWISE AGREED IN WRITING BY INTEL, THE INTEL PRODUCTS ARE NOT DESIGNED NOR IN- TENDED FOR ANY APPLICATION IN WHICH THE FAILURE OF THE INTEL PRODUCT COULD CREATE A SITUA- TION WHERE PERSONAL INJURY OR DEATH MAY OCCUR. Intel may make changes to specifications and product descriptions at any time, without notice. Designers must not rely on the absence or characteristics of any features or instructions marked "reserved" or "unde- fined." Intel reserves these for future definition and shall have no responsibility whatsoever for conflicts or incompatibilities arising from future changes to them. -

Readingsample
Embedded Robotics Mobile Robot Design and Applications with Embedded Systems Bearbeitet von Thomas Bräunl Neuausgabe 2008. Taschenbuch. xiv, 546 S. Paperback ISBN 978 3 540 70533 8 Format (B x L): 17 x 24,4 cm Gewicht: 1940 g Weitere Fachgebiete > Technik > Elektronik > Robotik Zu Inhaltsverzeichnis schnell und portofrei erhältlich bei Die Online-Fachbuchhandlung beck-shop.de ist spezialisiert auf Fachbücher, insbesondere Recht, Steuern und Wirtschaft. Im Sortiment finden Sie alle Medien (Bücher, Zeitschriften, CDs, eBooks, etc.) aller Verlage. Ergänzt wird das Programm durch Services wie Neuerscheinungsdienst oder Zusammenstellungen von Büchern zu Sonderpreisen. Der Shop führt mehr als 8 Millionen Produkte. CENTRAL PROCESSING UNIT . he CPU (central processing unit) is the heart of every embedded system and every personal computer. It comprises the ALU (arithmetic logic unit), responsible for the number crunching, and the CU (control unit), responsible for instruction sequencing and branching. Modern microprocessors and microcontrollers provide on a single chip the CPU and a varying degree of additional components, such as counters, timing coprocessors, watchdogs, SRAM (static RAM), and Flash-ROM (electrically erasable ROM). Hardware can be described on several different levels, from low-level tran- sistor-level to high-level hardware description languages (HDLs). The so- called register-transfer level is somewhat in-between, describing CPU compo- nents and their interaction on a relatively high level. We will use this level in this chapter to introduce gradually more complex components, which we will then use to construct a complete CPU. With the simulation system Retro [Chansavat Bräunl 1999], [Bräunl 2000], we will be able to actually program, run, and test our CPUs. -

Reverse Engineering X86 Processor Microcode
Reverse Engineering x86 Processor Microcode Philipp Koppe, Benjamin Kollenda, Marc Fyrbiak, Christian Kison, Robert Gawlik, Christof Paar, and Thorsten Holz, Ruhr-University Bochum https://www.usenix.org/conference/usenixsecurity17/technical-sessions/presentation/koppe This paper is included in the Proceedings of the 26th USENIX Security Symposium August 16–18, 2017 • Vancouver, BC, Canada ISBN 978-1-931971-40-9 Open access to the Proceedings of the 26th USENIX Security Symposium is sponsored by USENIX Reverse Engineering x86 Processor Microcode Philipp Koppe, Benjamin Kollenda, Marc Fyrbiak, Christian Kison, Robert Gawlik, Christof Paar, and Thorsten Holz Ruhr-Universitat¨ Bochum Abstract hardware modifications [48]. Dedicated hardware units to counter bugs are imperfect [36, 49] and involve non- Microcode is an abstraction layer on top of the phys- negligible hardware costs [8]. The infamous Pentium fdiv ical components of a CPU and present in most general- bug [62] illustrated a clear economic need for field up- purpose CPUs today. In addition to facilitate complex and dates after deployment in order to turn off defective parts vast instruction sets, it also provides an update mechanism and patch erroneous behavior. Note that the implementa- that allows CPUs to be patched in-place without requiring tion of a modern processor involves millions of lines of any special hardware. While it is well-known that CPUs HDL code [55] and verification of functional correctness are regularly updated with this mechanism, very little is for such processors is still an unsolved problem [4, 29]. known about its inner workings given that microcode and the update mechanism are proprietary and have not been Since the 1970s, x86 processor manufacturers have throughly analyzed yet. -
Pipeliningpipelining
ChapterChapter 99 PipeliningPipelining Jin-Fu Li Department of Electrical Engineering National Central University Jungli, Taiwan Outline ¾ Basic Concepts ¾ Data Hazards ¾ Instruction Hazards Advanced Reliable Systems (ARES) Lab. Jin-Fu Li, EE, NCU 2 Content Coverage Main Memory System Address Data/Instruction Central Processing Unit (CPU) Operational Registers Arithmetic Instruction and Cache Logic Unit Sets memory Program Counter Control Unit Input/Output System Advanced Reliable Systems (ARES) Lab. Jin-Fu Li, EE, NCU 3 Basic Concepts ¾ Pipelining is a particularly effective way of organizing concurrent activity in a computer system ¾ Let Fi and Ei refer to the fetch and execute steps for instruction Ii ¾ Execution of a program consists of a sequence of fetch and execute steps, as shown below I1 I2 I3 I4 I5 F1 E1 F2 E2 F3 E3 F4 E4 F5 Advanced Reliable Systems (ARES) Lab. Jin-Fu Li, EE, NCU 4 Hardware Organization ¾ Consider a computer that has two separate hardware units, one for fetching instructions and another for executing them, as shown below Interstage Buffer Instruction fetch Execution unit unit Advanced Reliable Systems (ARES) Lab. Jin-Fu Li, EE, NCU 5 Basic Idea of Instruction Pipelining 12 3 4 5 Time I1 F1 E1 I2 F2 E2 I3 F3 E3 I4 F4 E4 F E Advanced Reliable Systems (ARES) Lab. Jin-Fu Li, EE, NCU 6 A 4-Stage Pipeline 12 3 4 567 Time I1 F1 D1 E1 W1 I2 F2 D2 E2 W2 I3 F3 D3 E3 W3 I4 F4 D4 E4 W4 D: Decode F: Fetch Instruction E: Execute W: Write instruction & fetch operation results operands B1 B2 B3 Advanced Reliable Systems (ARES) Lab. -

RISC-V Geneology
RISC-V Geneology Tony Chen David A. Patterson Electrical Engineering and Computer Sciences University of California at Berkeley Technical Report No. UCB/EECS-2016-6 http://www.eecs.berkeley.edu/Pubs/TechRpts/2016/EECS-2016-6.html January 24, 2016 Copyright © 2016, by the author(s). All rights reserved. Permission to make digital or hard copies of all or part of this work for personal or classroom use is granted without fee provided that copies are not made or distributed for profit or commercial advantage and that copies bear this notice and the full citation on the first page. To copy otherwise, to republish, to post on servers or to redistribute to lists, requires prior specific permission. Introduction RISC-V is an open instruction set designed along RISC principles developed originally at UC Berkeley1 and is now set to become an open industry standard under the governance of the RISC-V Foundation (www.riscv.org). Since the instruction set architecture (ISA) is unrestricted, organizations can share implementations as well as open source compilers and operating systems. Designed for use in custom systems on a chip, RISC-V consists of a base set of instructions called RV32I along with optional extensions for multiply and divide (RV32M), atomic operations (RV32A), single-precision floating point (RV32F), and double-precision floating point (RV32D). The base and these four extensions are collectively called RV32G. This report discusses the historical precedents of RV32G. We look at 18 prior instruction set architectures, chosen primarily from earlier UC Berkeley RISC architectures and major proprietary RISC instruction sets. Among the 122 instructions in RV32G: ● 6 instructions do not have precedents among the selected instruction sets, ● 98 instructions of the 116 with precedents appear in at least three different instruction sets.