Signature Redacted a Uthor
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

The History of Dräger Johann Heinrich Dräger (1847–1917) Dr
D The History of Dräger Johann Heinrich Dräger (1847–1917) Dr. Bernhard Dräger (1870–1928) Dr. Heinrich Dräger (1898–1986) Contents 04 The Early Years: From Inventor’s Workshop to Medical and Safety Technology Specialist 10 Turbulent Times: Between Innovation Challenges and Political Constraints 20 New Beginnings: Transformation to a Modern Technology Group 30 Globalization: Realignment as a Global Technology Leader Dr. Christian Dräger (*1934) Theo Dräger (*1938) Stefan Dräger (*1963) Technology for Life for over 120 years Dräger is technology for life. Every day we take on the responsibility and put all our passion, know-how and experience into making life better: With outstanding, pioneering technology which is 100 percent driven by life. We do it for all the people around the world who entrust their lives to our technology, for the environment and for our common future. The key to the continued success of the Company, based in Lübeck, Germany, is its clear focus on the promising growth industries of medical and safety technology, its early expansi- on to international markets, and above all, the trust it has built and maintains with custo- mers, employees, shareholders, and the general public. The Company has always been managed by entrepreneurial members of the Dräger family, who have responsibly met new challenges while never losing sight of the vision: Johann Heinrich Dräger, Dr. Bernhard Dräger, Dr. Heinrich Dräger, Dr. Christian Dräger, Theo Dräger, and now Stefan Dräger. Healthy growth has consistently remained the main objective of the family business and shapes decisions within the Company even now. Founded in 1889 by Johann Heinrich Dräger, the family business has been headed in the fifth generation by CEO Stefan Dräger since 2005. -

Revue De L 'Académie Du Var 2018
Publications de l’académie du Var REVUE de L’ACADÉMIE DU VAR 2008 2009 2010 2011 2012 2013 REVUE DE L’ACADÉMIE DU VAR 2018 REVUE DE L’ACADÉMIE 2014 2015 2018 15 2018 ISSN 1148-7852 Revue de l’académie du Var Année 2018 Nouvelle série Tome XIX La Revue de l’académie du Var paraît depuis 1833 grâce à une importante participation financière du Conseil départemental du Var Toulon, académie du Var, 2018 ACADÉMIE DU VAR (association loi 1901 reconnue d’intérêt public) 416 passage de la Corderie 83000 Toulon - France Téléphone 04 94 92 62 67 Site Internet : http://www.academieduvar.fr Mél. : [email protected] Permanence le lundi de 14 h 30 à 16 h 30 Gilbert BUTI, président André FOURÈS, secrétaire général Patrick BUffE, secrétaire des séances Jean-Pierre AUBRY, trésorier Directeur de la publication : Gilbert BUTI Rédacteur en chef : Gérard DELafORGE Comité de rédaction : Roland BILLAULT (commission de littérature), Rémi MONAQUE (commission d’histoire et d’archéologie), Bernard CROS, Anne SOHIER-MEYRUEIS (commission des sciences), Monique BOURGUET (commission des beaux-arts), Michel HEGER (conservateur des beaux-arts), Ellen AYOUN, Bernard BRISOU, Jean-Paul MEYRUEIS, Jacques KERIGUY, André BÉRUTTI. Imprimeur : Imprimerie SIRA - 960 route de Bandol - 83110 Sanary-sur-Mer Parution : juin 2019 Dépôt légal : 2e trimestre 2019 ISSN : 1148-7852 Les opinions émises dans cette revue n’engagent que la responsabilité de leurs auteurs. Droits de traduction et d’adaptation réservés pour tous pays. La loi n° 57-298 du 11 mars 1957 sur la propriété littéraire et artistique, article 41 alinéas 2 et 3, n’autorise que « les copies ou reproductions strictement réservées à l’usage privé du copiste et non destinées à une utilisation collective » ainsi que « les analyses et courtes citations ». -

Download X-Ray Magazine (Pdf)
Coastal America Pacific Northwest & Alaska Canada GLOBAL EDITION Vancouver Island April : May 2005 Honduras Number 4 Roatan Sharks Technology Rebreathers Ecology Fish Sense Equipment Apeks Profile Amos Nachoum Win the new Portfolio Thermocline garment Jon Gross DETAILS ON PAGE 69-70 1 X-RAY MAG : 4 : 2005 Cover photo: Jack Connick DIRECTORY X-RAY MAG is published by Blue Horizons Expedition & Dive Club Copenhagen, Denmark www.bluehorizons.dk www.xray-mag.com PUBLISHER & EDITOR-IN-CHIEF Peter Symes contents [email protected] MANAGING EDITOR & ART DIRECTOR Gunild Pak Symes [email protected] TECHNICAL MANAGER Søren Reinke [email protected] CONTRIBUTORS Michael Arvedlund Nonoy Tan Bill Becher Amos Nachoum Andrey Bizyukin Michel Tagliati Edwin Marcow John Collins John Collins Edwin Marcow Garold Sneegas Michael Arvedlund Leigh Cunningham Svetlana Murashkina Kai Garseg Yann Saint-Yves Karen Gowlette Holmes Tony White Leigh Cunningham Jeff Dudas Michael Symes Jordi Chias Barb Roy Jack Connick Jon Gross Kevin Gurr SCIENCE EDITOR Michael Symes [email protected] Further info on our contacts page on our website GREEN ANEMONE, CAPE FLATTERY, WASHINGTON, USA. PHOTO BY JACK CONNICK X-RAY MAG is distributed six times per year on the Internet.All rights reserved. Material in this publication may not be reproduced or transferred electronically in 17 29 32 36 43 Plus... any form without written permission. PACIFIC NORTHWEST NEAH BAY OH CANADA! DIVING VANCOUVER ISLAND WRECKS OF EDITORIAL 3 EDITED BY PETER SYMES BY JACK CONNICK BRITISH COLUMBIA BY JOHN COLLINS VANCOUVER ISLAND; DIVE NEWS 5 Views and information expressed in articles are that EQUIPMENT 55 of the individual author and are not necessarily repre- & GUNILD PAK SYMES BY PETER SYMES MAKE REEFS NOT WAR BOOKS•CDs•DVDs 62 sentative of views held by X-RAY MAG or its affiliates. -
Idstorical Diver
Historical Diver, Number 3, 1994 Item Type monograph Publisher Historical Diving Society U.S.A. Download date 09/10/2021 13:15:37 Link to Item http://hdl.handle.net/1834/30846 IDSTORICAL DIVER Number 3 Summer 1994 The Official Publication of the Historical Diving Society U.S.A As you will by now know, the Society has relocated to Santa Barbara, California and this move, along with various other Society developments has delayed the publication of the Spring '94 issue of HISTORICAL DIVER. By way of catching up, we have produced a Summer double issue and have the good fortune to be able to publish with a color cover. Coinciding with the Santa Barbara relocation is the appointment, by the Board of Directors, of the first members of the HDS USA Advisory Board. This distinguished group of senior diving professionals, with extensive backgrounds in diving medicine, technical development, commercial, military and sports diving, bring in excess of 300 years of diving experience to the Society. Most of their biographies are the size of town phone directories, and have had to be severely edited for publication. We are honored and gratefulfortheir willing offers of service, and hope that we have done their biographies justice. Details start on page 4. The recently introduced, Founding Benefactor class of membership has proven to be very popular with over half of the thirty available memberships already taken. An opportunity still exists to acquire one of these unique memberships and details of it's benefits are noted on page 9. On the international front, the ongoing formation of the HDS USA as a nonprofit corporation has, by law, changed the conditions that govern our relationship with the HDS in UK. -
Lad Handelman Part 2 by Staff in Cooperation with Lad Handelman and Profile Ofchris a Topherpioneer Swann
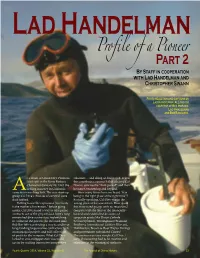
Lad Handelman Part 2 By Staff in cooperation with Lad Handelman and Profile ofChris a topherPioneer Swann Photo selection and captions by Lad Handelman. All photos courtesy of Bev Morgan, Lad Handelman and Bob Ratcliffe. s a result of Union Oil’s Platform solutions… and doing an honest job. It was A oil spill in the Santa Barbara this unorthodox approach that allowed Cal Channel on January 28, 1969, the Dive to survive the “dark period” and then drilling industry in California become Oceaneering and beyond. came to a screeching halt. The new start-up How many times have we heard “it is Agroup Cal Dive’s chances of survival were being in the right place at the right time”? dark indeed. Factually speaking, Cal Dive was in the Putting to use the expression “necessity wrong place at the worst time. How could is the mother of invention,” before going this mini-sized group, with no resources, under, Cal Dive found a way to take prime compete with the likes of the financially- contracts out of the grip of Cook Inlet’s long backed and established divisions of entrenched dive contractors, replenishing corporate giants like Union Carbide its coffers in the process. At the same time (Ocean Systems), Westinghouse (Sanford Bob Ratcliffe was finding a way to undercut Brothers), International Utilities (Divcon), longstanding large marine contractors’ lock Halliburton/Brown & Root (Taylor Diving) on municipal projects and still collect lots and government subsidized Comex? of profit for the company. What Cal Dive The answer was very simple: Cal Dive / lacked in size and reputation was made early Oceaneering had to be creative and up for by crafting innovative inexpensive relentless in the winning of contracts. -

Underwater Vehicles the History of Working in Water
Underwater Vehicles The history of working in water Photo courtesy of Robert Keith MAST 55 Why do people go underwater? Under the sea is a dangerous, hostile environment. • Humans can’t breath underwater • Cold • Pressure • Weather The ocean is not always a nice place to work! Photo courtesy of Robert Keith Why do people go underwater? • Profit – If you are willing and able to work in difficult terrain where others cannot work, you can make a bigger profit. • Discovery – Humans have a tendency to be curious and a desire to see and learn new things. • Military Advantage – Go where you enemy cannot see you and you have an advantage. History of working underwater Ancient Greece: Greek Sponge Divers were the first recorded people to work in the underwater environment. At first they didn’t have any special equipment. New Technologies: Diving bell Air inside leather bladders This tech wasn’t much, but it helped them to stay down longer and complete more work. From Nautical Museum of Kalymnos Why did the Greeks go underwater? • Profit: They could acquire a product, sponges, that no one on land could get. • Discovery: Alexander the Great reportedly went underwater with a diving bell to look around. • Military advantage: The Greeks used sponge divers who could hold their breath to cut the anchor lines of enemy ships. Why do you want to go underwater? First recorded female undersea worker. Cyana and her father, Scyillis. 500 BC. The need for technology People found resources (profit) deeper in the oceans. Explorers wanted to explore further into the seas. -

PDF (Thumbnails)
Serving robot finds work at Victoria restaurant () Utopia VR - The Metaverse for Everyone () Utopia VR Promo Video () Facebook warned over ‘very small’ indicator LED on smart glasses, as EU DPAs flag privacy concerns () Google’s Former AI Ethics Chief Has a Plan to Rethink Big Tech () Introducing iPhone 13 Pro | Apple () Introducing Apple Watch Series 7 | Apple () Apple reveals Apple Watch Series 7, featuring a larger, more advanced display () Xiaomi shows off concept smart glasses with MicroLED display () Xiaomi Smart Glasses | Showcase | A display in front of your eyes () ‘Neurograins’ Could be the Next Brain-Computer Interfaces () Welcome back to the moment. With Ray-Ban x Facebook () Facebook's Ray-Ban Stories smart glasses: Cool or creepy? () Introducing WHOOP 4.0 - The Personalized Digital Fitness and Health Coach () Introducing WHOOP Body - The Future of Wearable Technology () The Future of Communication in the Metaverse () Making pancakes with Reachy through VR Teleoperation () Trump Camp Posts Fake Video Of Biden () More than 50 robots are working at Singapore's high-tech hospital () The manual for Facebook’s Project Aria AR glasses shows what it’s like to wear them () Tesla Bot explained () Tesla Bot Takes Tech Demos to Their Logical, Absurd Conclusion () Watch brain implant help man 'speak' for the first time in 15 years () An Artificial Intelligence Helped Write This Play. It May Contain Racism () Elon Musk REVEALS Tesla Bot () Meet Grace, a humanoid robot designed for healthcare () Horizon Workrooms - Remote Collaboration Reimagined () Atlas | Partners in Parkour () Page 1 of 165 Inside the lab: How does Atlas work? () Neural recording and stimulation using wireless networks of microimplants () The Metaverse is a Dystopian Nightmare. -
ADS Newtsuit
ADS Newtsuit The Newtsuit 1000 is a lightweight atmospheric diving system (ADS) designed as a safe and full capability alternative to costly and high diver-risk deep ‘bounce’ or ‘saturation’ diving methods. Invented and patented by Nuytco Research Ltd’s Dr. Phil Nuytten, the Newtsuit allows the pilot/operator access to worksites deeper than can be worked by a conventional commercial diver, while exceeding the capabilities of access and ‘hand’ function of even the most sophisticated ROVs. The Newtsuit is a fully proven design that has been in use worldwide for nearly twenty-five years in support of military and commercial undersea operations. Nuytco Research operates the Newtsuit on an operational basis, in concert with other one-atmosphere assets. The pilot/operator of the Newtsuit ADS remains at one atmosphere and is protected from the outside water pressure at depths up to one thousand feet. There is no requirement for any decompression. No decompression means that the pilot/operator completely avoids the physiological risks associated with deep ambient pressure or saturation diving and the end-user avoid avoids the long, risky and costly decompression of saturation diving. With the pilot/operator remaining at one atmosphere, the Newtsuit has the same type of range and even greater mid-water maneuverability than a full work-class ROV spread. Unlike the ROV systems, the Newtsuit has the advantage of being small enough to have access to restricted spaces and has the ability to perform intricate tasks that were formerly the exclusive domain of commercial divers. ADS Newtsuit Specifications General: • 1000 foot (300m) depth-rated • Weight in air: 850lbs • 1 Pilot • Payload: 250lbs • Dimensions H 81”, W44”, D33” • Max Speed: 1.25 knots Phone: 604 980 6262 Nuytco Research Ltd Email: [email protected] 216 East Esplanade, North Vancouver Web: www.nuytco.com B.C. -

Next-Generation Deep-Diving Exosuit on Rare Public Display at American Museum of Natural History
Media Inquiries: Kendra Snyder, Department of Communications 212-496-3419; [email protected] www.amnh.org _____________________________________________________________________________________ February 2014 NEXT-GENERATION DEEP-DIVING EXOSUIT ON RARE PUBLIC DISPLAY AT AMERICAN MUSEUM OF NATURAL HISTORY ATMOSPHERIC DIVING SYSTEM ALLOWS PILOT TO PLUNGE 1,000 FEET, EXPLORE MARINE BIODIVERSITY WITH DEXTERITY ON DISPLAY FEBRUARY 27-MARCH 5, 2014 The “Exosuit,” a next-generation atmospheric diving system capable of taking a diver down 1,000 feet at surface pressure, will be on temporary display at the American Museum of Natural History from February 27 to March 5 in the Irma and Paul Milstein Family Hall of Ocean Life. Measuring about 6.5-feet tall and weighing more than 530 pounds, the hard-metal suit offers divers protection from the ocean’s pressure, which at 1,000 feet is 30 times the surface pressure, while allowing them to maintain the dexterity and maneuverability to perform delicate tasks, such as sampling and imaging marine biodiversity with high-resolution underwater cameras. Owned by the J.F. White Contracting Company in Framingham, Massachusetts, the first-production Exosuit— currently the only suit in existence—will be tested as a scientific tool this July on the Stephen J. Barlow Bluewater Expedition. “Our access to these deeper open water and reef habitats has been limited, which has restricted our abilty to investigate the behavior and flashing patterns of bioluminescent organisms, or to effectively collect fishes and invertebrates from deep reefs,” said John Sparks, a curator in the Museum’s Department of Ichthyology who has led a series of marine expeditions across the globe, most recently the Museum’s Explore21 Solomon Islands Expedition. -
Lighthouse Edition 35
Edition No. 35, APRIL, 1987 ISSN 0711-5628 JOURNAL OF THE CANADIAN HYDROGRAPHIC ASSOCIATION Aanderaa Instruments Proven Performance. Land, Sea And Air Every day, Aanderaa instruments meet the demand for precise meteorological and Recording marine measurement current meter around the world. RCM-4S Easily assembled automatic weather stations. A wide range of oceanographic instruments. And ... Aanderaa's Comprehensive Data Recovery A reliable ... accurate and economical retrieval service. Quality calibration service. Extensive maintenance facilities. Call or write: Geodimeter® Paints the Picture n accurate picture of You may store positional or 140H is the positioning Ayour seabed depends data at the shore station system for your every on precise vessel position with Geodat Data Recor requirement. ing. Geodimeter® has the ders, or simultaneously Let us complete the picture solutions for all of your transmit with exceptional for you! Please contact us near and inshore survey accuracy to on-board today for additional applications. computers. information, or a field Our advanced 140s and Whether you're dredging, demonstration of Geodi 140H Total Station mapping, laying cable or meter® Hydrographic Positioning Systems con pipe, or determining vol Positioning System. tinuously locate and re umes, Geodimeter® 140s Geodimeter® of Canada Ltd. cord the exact position of 41 Horner Avenue, Unit 5 a vessel, even when Toronto, Ontario M8Z 4X4 moving at speeds of up (~1§4·1dllii4i·l1 (416) 252-4691 to 8 knots. Toll Free 1-800-268-0375 Nothing else quite measures up ... ARGO: THE BEST RADIO POSITIONING SYSTEM JUST GOT BETTER. Cubic's ARGO OM-54 has long held first place as the world's best long-range radio positioning system. -

Ligpo Island
Valentines Day Special: Gifts for Divers Exotic Diving The Philippines LIGPO CEBU MALAPASCUA DUMAGUETE DAUIN GLOBAL EDITION History February :: March 2006 First Frogmen Number 9 Deepest Wreck Dive Yolanda Canada Nova Scotia Isla Guadelupe Profile Sharks Dr Phil Nyutten Portfolio Ray Troll: Sharkabet COVER PHOTO BY NONOY TAN 1 X-RAY MAG : 9 : 2006 DIRECTORY X-RAY MAG is published by AquaScope Underwater Photography Special Valentines Issue Copenhagen, Denmark - www.aquascope.biz www.xray-mag.com Gifts for the Diver in Your Life... page 75 DIVER WITH OUTSTRETCHED ARMS GOLD PENDENT AVAILABLE AT WWW.SEAWEAR.COM PUBLISHER CO- EDITORS & EDITOR-IN-CHIEF Andrey Bizyukin Pair of Gobies, The Philippines. Photo by Scott Bennett Peter Symes - Caving, Equipment, Medicine [email protected] Michael Arvedlund - Ecology MANAGING EDITOR Dan Beecham - Photography contents & ART DIRECTOR Michel Tagliati - Videography, Gunild Pak Symes Rebreathers, Medicine [email protected] Leigh Cunningham ADVERTISING - Technical Diving The Americas + Asia-Pacific: Edwin Marcow Claude Jewell, USA - Sharks, Adventures International sales manager Michael Portelly [email protected] Catherine GS Lim Europe + Africa: [email protected] REGULAR WRITERS South East Asia representative: John Collins - Ireland Catherine GS Lim, Singapore Nonoy Tan - The Philippines [email protected] Amos Nachoum - CA, USA Internet-advertising: Robert Aston - CA, USA Deb Fugitt, USA Bill Becher - CA, USA [email protected] CONTRIBUTORS THIS ISSUE SENIOR EDITOR Dan Beecham Michael Symes [email protected] Scott Bennet Adam Butler TECHNICAL MANAGER Sven Erik Jørgensen Søren Reinke Catherine GS Lim [email protected] Svetlana Murashkina, PhD CORRESPONDENTS Barb Roy John Collins - Ireland Stewart L. -
Proceedings of the Advanced Scientific Diving Workshop
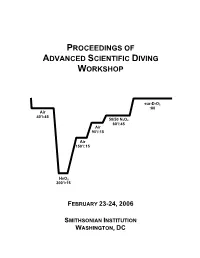
PROCEEDINGS OF ADVANCED SCIENTIFIC DIVING WORKSHOP sur-D-O2 :80 Air 40’/:45 50/50 N2O2 60’/:45 Air 90’/:15 Air 150’/:15 HeO2 300’/:15 FEBRUARY 23-24, 2006 SMITHSONIAN INSTITUTION WASHINGTON, DC Lang, M.A. and N.E. Smith (eds.) 2006. Proceedings of the Advanced Scientific Diving Workshop. February 23-24, 2006. Smithsonian Institution, Washington, DC. 277 p. Copyright © 2006 by Smithsonian Institution PO Box 37012 – MRC 415 Washington, DC 20013-7012 All Rights Reserved No part of this book may be reproduced in any form by photostat, microfilm, pdf, or any other means without written permission from the publisher. The publication of this document was sponsored by the Office of the Under Secretary for Science, Smithsonian Institution, the National Oceanic and Atmospheric Administration, and the American Academy of Underwater Sciences. The U.S. Government is authorized to produce and distribute reprints for governmental purposes notwithstanding the copyright annotation that appears above. Opinions presented at the Workshop and in the Proceedings are those of the contributors, and do not necessarily reflect those of the Smithsonian Institution Scientific Diving Program, the National Oceanic and Atmospheric Administration, or the American Academy of Underwater Sciences. Cover graph: 300 fsw multi-depth, multi-gas dive profile described by M.L. Gernhardt (p. 36). 2 Contents Acknowledgements iii Welcoming remarks iv 1. Introductory Session PRESENTATION OF THE ISSUES. Michael A. Lang ..………………………………………………...................1 NOAA-NURP’s DEEP SCIENTIFIC DIVING NEEDS. N. Eugene Smith .……………………………………………………………3 HISTORIC PERSPECTIVE: SCIENTIFIC DEEP DIVING AND THE MANAGEMENT OF THE RISK. Glen H. Egstrom .…………………………………………………………….7 2. Decompression/Physiology Session DECOMPRESSION SICKNESS AND OXYGEN TOXICITY IN U.S.