Robust Omniphobic Surfaces by Mimicking the Springtail Skin Morphology
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Unexpected Diversity in Neelipleona Revealed by Molecular Phylogeny Approach (Hexapoda, Collembola)
S O I L O R G A N I S M S Volume 83 (3) 2011 pp. 383–398 ISSN: 1864-6417 Unexpected diversity in Neelipleona revealed by molecular phylogeny approach (Hexapoda, Collembola) Clément Schneider1, 3, Corinne Cruaud2 and Cyrille A. D’Haese1 1 UMR7205 CNRS, Département Systématique et Évolution, Muséum National d’Histoire Naturelle, CP50 Entomology, 45 rue Buffon, 75231 Paris cedex 05, France 2 Genoscope, Centre National de Sequençage, 2 rue G. Crémieux, CP5706, 91057 Evry cedex, France 3 Corresponding author: Clément Schneider (email: [email protected]) Abstract Neelipleona are the smallest of the four Collembola orders in term of species number with 35 species described worldwide (out of around 8000 known Collembola). Despite this apparent poor diversity, Neelipleona have a worldwide repartition. The fact that the most commonly observed species, Neelus murinus Folsom, 1896 and Megalothorax minimus Willem, 1900, display cosmopolitan repartition is striking. A cladistic analysis based on 16S rDNA, COX1 and 28S rDNA D1 and D2 regions, for a broad collembolan sampling was performed. This analysis included 24 representatives of the Neelipleona genera Neelus Folsom, 1896 and Megalothorax Willem, 1900 from various regions. The interpretation of the phylogenetic pattern and number of transformations (branch length) indicates that Neelipleona are more diverse than previously thought, with probably many species yet to be discovered. These results buttress the rank of Neelipleona as a whole order instead of a Symphypleona family. Keywords: Collembola, Neelidae, Megalothorax, Neelus, COX1, 16S, 28S 1. Introduction 1.1. Brief history of Neelipleona classification The Neelidae family was established by Folsom (1896), who described Neelus murinus from Cambridge (USA). -

Reviews of the Genera Schaefferia Absolon, 1900, Deuteraphorura
TAR Terrestrial Arthropod Reviews 5 (2012) 35–85 brill.nl/tar Reviews of the genera Schaefferia Absolon, 1900, Deuteraphorura Absolon, 1901, Plutomurus Yosii, 1956 and the Anurida Laboulbène, 1865 species group without eyes, with the description of four new species of cave springtails (Collembola) from Krubera-Voronya cave, Arabika Massif, Abkhazia Rafael Jordana1, Enrique Baquero1*, Sofía Reboleira2 and Alberto Sendra3 1Department of Zoology and Ecology, University of Navarra, 31080 Pamplona, Spain e-mails: [email protected]; [email protected] *Corresponding author. 2Department of Biology, Universidade de Aveiro and CESAM Campus Universitário de Santiago, 3810-193 Aveiro, Portugal e-mail: [email protected] 3Museu Valencià d’Història Natural (Fundación Entomológica Torres Sala) Paseo de la Pechina 15. 46008 Valencia, Spain e-mail: [email protected] Received on November 4, 2011. Accepted on November 21, 2011 Summary Krubera-Voronya cave and other deep systems in Arabika Massif are being explored during many speleological expeditions. A recent Ibero-Russian exploration expedition (summer of 2010) took place in this cave with the aim of providing a study of the biocenosis of the deepest known cave in the world. Four new species of Collembola were found at different depths: Schaefferia profundissima n. sp., Anurida stereoodorata n. sp., Deuteraphorura kruberaensis n. sp., and Plutomurus ortobalaganensis n. sp., the last one at -1980 m deep. The identification and description of the new species have required the careful study of all congeneric species, implying a revision of each genus. As a result of this work tables and keys to all significant characters for each species are presented. -

The Changing of the Guard in White Grub Control Insecticides
A PRACTICAL RESEARCH DIGEST FOR TURF MANAGERS Volume 10, Issue 6 • June 2001 ¡TURFGRASS PEST CONTROL IN THIS ISSUE • The changing of the The Changing of the guard in white grub Guard in White Grub control insecticides 1 Organophosphate/ Control Insecticides carbamate update New product information By Kevin Mathias Natural control influence of insecticides combination of federal regulatory rulings and economic decisions by insecticide Multiple targeting manufacturers has dramatically changed the landscape of white grub insecticides A and control strategies. At the beginning of the 1990's white grub control insecti- • Site analysis for golf cides consisted mainly of organophosphate and carbamate based chemistries with only a course development 7 few biorational products available (Table 1). As a group, the organophosphate and car- Climate bamate insecticides, have a relatively short residual activity and are highly efficacious when used in curative control programs. Topography Optimum results are attained if the products are applied in mid to late August or into September, as white grub damage is first noticed and Drainage patterns when the grubs are young and relatively small. Optimum results are Water availability As we enter the new millennium many of the cura- attained if the tive control products have been replaced by a group of Soils and geology products are applied new insecticides. These insecticides, Merit and Mach 2, offer greater applicator safety, have less adverse effect Environmental issues in mid to late August on the environment, provide a longer window of appli- Wetlands or into September, as cation due to their extended soil residual activities, have minimal impact on beneficial predators, and pro- Water quality white grub damage vide excellent control (+90%) of white grubs. -
Springtails in Sugarbeet: Identification, Biology, And
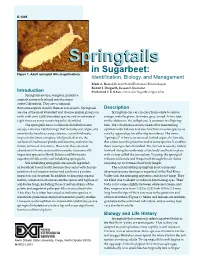
E-1205 SpringtailsSpringtails in Sugarbeet: Figure 1. Adult springtail (40x magnification). Identification, Biology, and Management Mark A. Boetel, Research and Extension Entomologist Robert J. Dregseth, Research Specialist Introduction Mohamed F. R. Khan, Extension Sugarbeet Specialist Springtails are tiny, wingless, primitive animals commonly placed into the insect order Collembola. They are so unusual that some experts classify them as non-insects. Springtails Description are one of the most abundant and diverse animal groups on Springtails can vary in color from white to yellow, earth with over 6,000 described species and an estimated orange, metallic green, lavender, gray, or red. A tiny tube eight times as many remaining to be identified. on the abdomen, the collophore, is common to all spring- The springtails have worldwide distribution and tails. The collophore is mostly needed for maintaining occupy a diverse habitat range that includes soil, algae, old optimal water balance but also functions in some species as snowbanks, beaches, caves, cisterns, vacant bird nests, a sticky appendage for adhering to surfaces. The name tropical rain forest canopies, tidal pools, deserts, the “springtail” refers to an unusual forked organ, the furcula, surfaces of freshwater ponds and streams, and even the that arises near the posterior end of some species. It enables frozen terrain of Antarctica. However, they are most them to jump when disturbed. The furcula is usually folded abundant in warm, moist environments. Economically forward along the underside of the body and held in place important species in North Dakota and Minnesota with a clasp called the tenaculum. To jump, the springtail sugarbeet fields are the soil-inhabiting springtails. -

13 Index of Common Names
Index of Common Names BITING/STINGING/VENOMOUS PESTS Bees ………………………………………………………… 6 Honey bee…………………………………………………6 Africanized bees……………………………………….. 7 Bumblebee…………………………………………………….9 Carpenter bee……………………………………………….9 Digger bee………………………………………………………11 Leaf cutter bee………………………………………………….12 Sweat bee………………………………………………………..13 Wasps…………………………………………………………….14 Tarantula hawk…………………………………………………14 Yellowjacket……………………………………………………….15 Aerial yellowjacket ……………………………………………….15,16 Common yellowjacket ……………………………………………….15 German yellowjacket……………………………………………….15 Western yellowjacket……………………………………………….15 Paper wasp………………………………………………. 18 Brown paper wasp……………………………………………….18 Common paper wasp ……………………………………………….18 European paper wasp……………………………………………….18 Navajo paper wasp……………………………………………….18,19 Yellow paper wasp……………………………………………….18,19 Western paper wasp……………………………………………….18 Mud dauber………………………………………………. 20 Black and blue mud dauber……………………………..………………….20 Black and yellow mud dauber……………………………………………….20 Organ pipe mud dauber……………………………………………….20,21 Velvet ant……………………………………………………21 Scorpions………………………………………………………23 Arizona bark scorpion……………………………………………….23 Giant hairy scorpion ……………………………………………….24 Striped-tail scorpion……………………………………………….25 Yellow ground scorpion……………………………………………….25 Spiders…………………………………………………………..26 Cellar spider……………………………………………….2 6 Recluse spider……………………………………………….27 Tarantula…………………………………………………. 28 Widow spider……………………………………………….29 Scorpion/spider look-alikes……………………………………………….30 Pseudoscorpion……………………………………………….30 Solifugid/wind -

Observations on the Springtail Leaping Organ and Jumping Mechanism Worked by a Spring
Observations on the Springtail Leaping Organ and Jumping Mechanism Worked by a Spring Seiichi Sudo a*, Masahiro Shiono a, Toshiya Kainuma a, Atsushi Shirai b, and Toshiyuki Hayase b a Faculty of Systems Science and Technology, Akita Prefectural University, Japan b Institute of Fluid Science, Tohoku University, Japan Abstract— This paper is concerned with a small In this paper, the springtail leaping organ was jumping mechanism. Microscopic observations of observed with confocal laser scanning microscopy. A springtail leaping organs were conducted using a jumping mechanism using a spring and small confocal leaser scanning microscope. A simple electromagnet was produced based on the observations springtail mechanism using a spring and small of leaping organ and the jumping analysis of the electromagnet was produced based on the observations springtail. of leaping organ and the jumping analysis of the globular springtail. Jumping characteristics of the mechanism were examined with high-speed video II. EXPERIMENTAL METHOD camera system. A. Microscopic Observations Index Terms—Jumping Mechanism, Leaping Organ, Globular springtails are small insects that reach Springtail, Morphology, Jumping Characteristics around 1 mm in size. They have the jumping organ (furcula), which can be folded under the abdomen. Muscular action releasing the furcula can throw the I. INTRODUCTION insect well out of the way of predators. Jumping in insect movement is an effective way to In this paper, microscopic observations of the furcula escape predators, find food, and change locations. were conducted using the confocal laser scanning Grasshoppers, fleas, bush crickets, katydids, and locusts microscope. Confocal laser scanning microscopy is are particularly well known for jumping mechanisms to fluorescence – imaging technique that produces move around. -

Entomimética
E ntomimÉtica t EransF rEncias al disEño dEsdE la morFología y El comportamiEnto dE los insEctos Alejandro Soffia Profesor, Universidad Andrés Bello. Santiago, Chile Más allá de sus características formales, los insectos poseen propiedades físicas que les han permitido adaptarse y sobrevivir en un ambiente hostil. La entomimética busca transferir estas propiedades al diseño, permitiendo que la arquitectura aprenda de aquellos seres vivos que han enfrentado al entorno con sus propias pieles y estructuras. En otras palabras, aquellos seres vivos que portan sus propias arquitecturas. p aLabras cLave · biomimésis, optimización, reproductibilidad, sustentabilidad, arquitectura El escarabajo Onymacris unguicularis vive en el desierto de Namibia donde el agua no es escasa: simplemente no existe. Entonces ¿cómo lo hace para sobrevivir? Su cuerpo presenta una superficie que actúa como un atrapanieblas que, en relación a la brisa marina cercana, produce la condensación necesaria para adquirir el vital elemento. No cabe duda que en un escenario global donde la aridez va en aumento, aquellas estrategias exitosas para acceder al agua dulce serán cada vez más demandadas. Pero así como este escarabajo, existen muchas especies de plantas y animales que presentan formas y comportamientos que les permiten obtener agua de manera exitosa. ¿Qué pasaría si pudiésemos transferir estas formas y comportamientos al diseño de objetos o edificios? ARQ 94 118 UC CHILE FIG 1 Dibujos de una serie de especies de escarabajos y sus componentes Drawings of a series of beetles species and their components. Fuente / Source: gay, Claudio. Atlas de la Historia Física y Política de Chile. Paris, Imprenta de E. Thunot y C°, 1854. -

Aquatic Insects in a Multistress Environment: Cross-Tolerance To
© 2017. Published by The Company of Biologists Ltd | Journal of Experimental Biology (2017) 220, 1277-1286 doi:10.1242/jeb.152108 RESEARCH ARTICLE Aquatic insects in a multistress environment: cross-tolerance to salinity and desiccation Susana Pallarés1,*,Marıá Botella-Cruz1, Paula Arribas2,3,4, Andrés Millán1 and Josefa Velasco1 ABSTRACT against the two stressors are shared (cross-tolerance, e.g. Elnitsky Exposing organisms to a particular stressor may enhance tolerance et al., 2009; Holmstrup et al., 2002) or, conversely, can cause to a subsequent stress, when protective mechanisms against the two the organisms to be more susceptible to the second stress stressors are shared. Such cross-tolerance is a common adaptive (cross-susceptibility) (Sinclair et al., 2013; Todgham and response in dynamic multivariate environments and often indicates Stillman, 2013). potential co-evolution of stress traits. Many aquatic insects in inland Studies on multiple stressors have received increasing attention saline waters from Mediterranean-climate regions are sequentially for their potential to reveal interesting information, which would be challenged with salinity and desiccation stress. Thus, cross-tolerance difficult to predict based on single stressor approaches (DeBiasse to these physiologically similar stressors could have been positively and Kelly, 2016; Gunderson et al., 2016), as well as to increase our selected in insects of these regions. We used adults of the understanding of responses to global change in natural multivariate saline water beetles Enochrus jesusarribasi (Hydrophilidae) and environments (Hewitt et al., 2016). However, these approaches are Nebrioporus baeticus (Dytiscidae) to test cross-tolerance responses still scarce in the literature and are mostly focused on the combined to desiccation and salinity. -

An Annotated Checklist of the Springtail Fauna of Hungary (Hexapoda: Collembola)
Opusc. Zool. Budapest, (2007) 2008, 38: 3–82. An annotated checklist of the springtail fauna of Hungary (Hexapoda: Collembola) 1 2 L. DÁNYI and GY. TRASER Abstract. A checklist of the species of springtails (Hexapoda: Collembola) hitherto recorded from Hungary is presented. Each entry is accompanied by complete references, and remarks where appropriate. The present list contains 414 species. he Collembola fauna of several countries in critical review of the literature data of Collembola T the world was already overwied in the recent referring to Hungary. past (e.g. Babenko & Fjellberg 2006, Culik & Zeppelini Filho 2003, Skidmore 1995, Waltz & HISTORY Hart 1996, Zhao et al. 1997). The importance of such catalogues was stressed by several authors The first records of Collembola referring to (e.g. Csuzdi et al, 2006: 2) and their topicality is Hungary are some notes on the mass occurrence indicated also by the fact that several cheklists of certain species (Frenzel 1673, Mollerus 1673, referring even to European states were published Steltzner 1881), which however, are without any most recently (e.g. Fiera (2007) on Romania, taxonomical or faunistical value, as it has already Juceviča (2003) on Latvia, Kaprus et al. (2004) on been pointed out by Stach (1922, 1929). The next the Ukrain, Skarzynskiet al. (2002) on Poland). In springtail reference to Hungary is to be found in spite of these facts, the last comprehensive article the zoological book of János Földy (1801), which on the Hungarian springtail fauna was published was the first time the group was mentioned in about 80 years ago (Stach 1929), eventhough such Hungarian language in the scientific literature, critical reviews have a special importance in the eventhough this work doesn’t contain relevant case of this country because of the large changes faunistical records of the taxon. -

Marine Insects
UC San Diego Scripps Institution of Oceanography Technical Report Title Marine Insects Permalink https://escholarship.org/uc/item/1pm1485b Author Cheng, Lanna Publication Date 1976 eScholarship.org Powered by the California Digital Library University of California Marine Insects Edited by LannaCheng Scripps Institution of Oceanography, University of California, La Jolla, Calif. 92093, U.S.A. NORTH-HOLLANDPUBLISHINGCOMPANAY, AMSTERDAM- OXFORD AMERICANELSEVIERPUBLISHINGCOMPANY , NEWYORK © North-Holland Publishing Company - 1976 All rights reserved. No part of this publication may be reproduced, stored in a retrieval system, or transmitted, in any form or by any means, electronic, mechanical, photocopying, recording or otherwise,without the prior permission of the copyright owner. North-Holland ISBN: 0 7204 0581 5 American Elsevier ISBN: 0444 11213 8 PUBLISHERS: NORTH-HOLLAND PUBLISHING COMPANY - AMSTERDAM NORTH-HOLLAND PUBLISHING COMPANY LTD. - OXFORD SOLEDISTRIBUTORSFORTHEU.S.A.ANDCANADA: AMERICAN ELSEVIER PUBLISHING COMPANY, INC . 52 VANDERBILT AVENUE, NEW YORK, N.Y. 10017 Library of Congress Cataloging in Publication Data Main entry under title: Marine insects. Includes indexes. 1. Insects, Marine. I. Cheng, Lanna. QL463.M25 595.700902 76-17123 ISBN 0-444-11213-8 Preface In a book of this kind, it would be difficult to achieve a uniform treatment for each of the groups of insects discussed. The contents of each chapter generally reflect the special interests of the contributors. Some have presented a detailed taxonomic review of the families concerned; some have referred the readers to standard taxonomic works, in view of the breadth and complexity of the subject concerned, and have concentrated on ecological or physiological aspects; others have chosen to review insects of a specific set of habitats. -

A NEW GENUS of INTERTIDAL SALDIDAE from the EASTERN TROPICAL PACIFIC with NOTES on ITS BIOLOGY (Hemiptera)1
Pacific Insects ll (3-4) : 571-578 10 December 1969 A NEW GENUS OF INTERTIDAL SALDIDAE FROM THE EASTERN TROPICAL PACIFIC WITH NOTES ON ITS BIOLOGY (Hemiptera)1 By John T. Polhemus2 and William G. Evans3 Abstract: Paralosalda innova n. gen., n. sp. is described from the intertidal zone of the Pacific coast of Central America. This genus is placed in the subfamily Chiloxanthinae, and is the first known member of this group to possess 4 cells in the hemelytral mem brane. A key to the chiloxanthine genera is included, as is a summary of the intertidal saldid genera of the world, with a discussion of their relationship to Paralosalda. P. innova inhabits the mid- to upper littoral zone of protected rocky shores extending from northern Colombia to northern Costa Rica and, like other intertidal saldids, the adults spend periods of submergence by high tides in rock crevices and emerge at low tide. The nymphs, however, remain in the crevices most of the time. Until the discovery of the species described herein, only one saldid was known to ex clusively inhabit the intertidal zone in the New World : Pentacora mexicanum (Van Duzee). This insect, which evidently does not belong in Pentacora, is locally common on intertidal rocks in the northern part of the Gulf of California though the species was described from one specimen found under kelp on a beach (Van Duzee 1923). Other species of New World Saldidae are known to inhabit salt marshes and mud flats where they apparently survive submersion (for instance, Saldula notalis Drake, and Saldula palustris Douglas), but there is no evidence that they complete their life cycle in the intertidal zone or that they inhabit this zone exclusively; hence, for the present they are not considered to be intertidal in the true sense. -

Biolphilately Vol-64 No-3
Vol. 67 (1) Biophilately March 2018 5 FOG-COLLECTING BEETLES OF THE NAMIB DESERT Donald Wright, BU243 There exists in the Namib Desert of southwest Africa a group of beetles that collects moisture from the fog-laden air blowing in from the Atlantic coast. These all belong to the Family Tenebrionidae, Subfamily Pimeliinae. Those found on stamps to date include the following: Saucer Trench Beetle, Lepidochora discoidalis Gebien (Lepidochara of some) Namibia, Sc#1249c, 22 September 2012, $5.80 Onymacris paiva Haag Comoro Islands, unlisted, 28 July 2011, 2500fr SS (LR margin) (Stamperija) Fog-basking or Fog-drinking Beetle, Onymacris unguicularis Haag Comoro Islands, Sc#1078, 2 March 2009, 3000fr SS (L margin) Mozambique, Sc#1919, 30 November 2009, 175m SS (MR margin) Namibia, Sc#967a, 22 May 2000, $2 Namibia, Sc#1109, 15 February 2007, “Standard Mail” ($1.90) (with Web-footed Gecko) (perf 14×13¼) Namibia, Sc#1109a, 2008, “Standard Mail” ($1.90) (same, perf 14) Namibia, Sc#1168, 1 October 2008, “Registered Mail” ($18.20) (with False Ink Cap mushroom) Namibia, Sc#1186f, 8 February 2010, “Postcard Rate” ($4.60) Namibia, unlisted, 2010, “Standard Mail” ($2.50) (design similar to Sc#1186f) Long-legged White Namib Beetle, Stenocara eburnea Pascoe Niger, Sc#1054a, 27 July 2000, 200fr Namib Desert Beetle, Stenocara gracilipes Solier Kenya, Sc#854y, 16 November 2011, 65sh These are flightless beetles, many with fused wing covers (elytra). They are diurnal, burying themselves in their sandy habitat at night, and emerging during the day. There are 21 species of Onymacris, four of Stenocara, three of Lepidochora, and four of Physasterna.