A Simulation Approach for Optimising Energy-Efficient Driving
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
The Rough Guide to Naples & the Amalfi Coast
HEK=> =K?:;I J>;HEK=>=K?:;je CVeaZh i]Z6bVaÒ8dVhi D7FB;IJ>;7C7B<?9E7IJ 7ZcZkZcid BdcYgV\dcZ 8{ejV HVc<^dg\^d 8VhZgiV HVciÉ6\ViV YZaHVcc^d YZ^<di^ HVciVBVg^V 8{ejVKiZgZ 8VhiZaKdaijgcd 8VhVaY^ Eg^cX^eZ 6g^Zcod / AV\dY^EVig^V BVg^\a^Vcd 6kZaa^cd 9WfeZ_Y^_de CdaV 8jbV CVeaZh AV\dY^;jhVgd Edoojda^ BiKZhjk^jh BZgXVidHVcHZkZg^cd EgX^YV :gXdaVcd Fecf[__ >hX]^V EdbeZ^ >hX]^V IdggZ6ccjco^ViV 8VhiZaaVbbVgZY^HiVW^V 7Vnd[CVeaZh GVkZaad HdggZcid Edh^iVcd HVaZgcd 6bVa[^ 8{eg^ <ja[d[HVaZgcd 6cVX{eg^ 8{eg^ CVeaZh I]Z8Vbe^;aZ\gZ^ Hdji]d[CVeaZh I]Z6bVa[^8dVhi I]Z^haVcYh LN Cdgi]d[CVeaZh FW[ijkc About this book Rough Guides are designed to be good to read and easy to use. The book is divided into the following sections, and you should be able to find whatever you need in one of them. The introductory colour section is designed to give you a feel for Naples and the Amalfi Coast, suggesting when to go and what not to miss, and includes a full list of contents. Then comes basics, for pre-departure information and other practicalities. The guide chapters cover the region in depth, each starting with a highlights panel, introduction and a map to help you plan your route. Contexts fills you in on history, books and film while individual colour sections introduce Neapolitan cuisine and performance. Language gives you an extensive menu reader and enough Italian to get by. 9 781843 537144 ISBN 978-1-84353-714-4 The book concludes with all the small print, including details of how to send in updates and corrections, and a comprehensive index. -

Bagnoli, Fuorigrotta, Soccavo, Pianura, Piscinola, Chiaiano, Scampia
Comune di Napoli - Bando Reti - legge 266/1997 art. 14 – Programma 2011 Assessorato allo Sviluppo Dipartimento Lavoro e Impresa Servizio Impresa e Sportello Unico per le Attività Produttive BANDO RETI Legge 266/97 - Annualità 2011 Agevolazioni a favore delle piccole imprese e microimprese operanti nei quartieri: Bagnoli, Fuorigrotta, Soccavo, Pianura, Piscinola, Chiaiano, Scampia, Miano, Secondigliano, San Pietro a Patierno, Ponticelli, Barra, San Giovanni a Teduccio, San Lorenzo, Vicaria, Poggioreale, Stella, San Carlo Arena, Mercato, Pendino, Avvocata, Montecalvario, S.Giuseppe, Porto. Art. 14 della legge 7 agosto 1997, n. 266. Decreto del ministro delle attività produttive 14 settembre 2004, n. 267. Pagina 1 di 12 Comune di Napoli - Bando Reti - legge 266/1997 art. 14 – Programma 2011 SOMMARIO ART. 1 – OBIETTIVI, AMBITO DI APPLICAZIONE E DOTAZIONE FINANZIARIA ART. 2 – REQUISITI DI ACCESSO. ART. 3 – INTERVENTI IMPRENDITORIALI AMMISSIBILI. ART. 4 – TIPOLOGIA E MISURA DEL FINANZIAMENTO ART. 5 – SPESE AMMISSIBILI ART. 6 – VARIAZIONI ALLE SPESE DI PROGETTO ART. 7 – PRESENTAZIONE DOMANDA DI AMMISSIONE ALLE AGEVOLAZIONI ART. 8 – PROCEDURE DI VALUTAZIONE E SELEZIONE ART. 9 – ATTO DI ADESIONE E OBBLIGO ART. 10 – REALIZZAZIONE DELL’INVESTIMENTO ART. 11 – EROGAZIONE DEL CONTRIBUTO ART. 12 –ISPEZIONI, CONTROLLI, ESCLUSIONIE REVOCHE DEI CONTRIBUTI ART. 13 – PROCEDIMENTO AMMINISTRATIVO ART. 14 – TUTELA DELLA PRIVACY ART. 15 – DISPOSIZIONI FINALI Pagina 2 di 12 Comune di Napoli - Bando Reti - legge 266/1997 art. 14 – Programma 2011 Art. 1 – Obiettivi, -

Metropolitane E Linee Regionali: Mappa Della
Formia Caserta Caserta Benevento Villa Literno San Marcellino Sant’Antimo Frattamaggiore Cancello Albanova Frignano Aversa Sant’Arpino Grumo Nevano 12 Acerra 11Aversa Centro Acerra Alfa Lancia 2 Aversa Ippodromo Giugliano Alfa Lancia 4 Casalnuovo igna Baiano Casoria 2 Melito 1 in costruzione Mugnano Afragola La P Talona e e co o linea 1 in costruzione Casalnuovo ont Ar erna iemont Piscinola ola P Brusciano Salice asalcist Scampia co P Prat C De Ruggier Chiaiano Par 1 11 Aeroporto Pomigliano d’ Giugliano Frullone Capodichino Volla Qualiano Colli Aminei Botteghelle Policlinico Poggioreale Materdei Madonnelle Rione Alto Centro Argine Direzionale Palasport Montedonzelli Salvator Stazione Rosa Cavour Centrale Medaglie d’Oro Villa Visconti Museo 1 Garibaldi Gianturco anni rocchia Quar v cio T esuvio Montesanto a V Quar La Piazza Olivella S.Gioeduc fficina cola to C Socca Corso Duomo T O onticelli onticelli De Meis er ollena O Quar P T T Quattro in costruzione a Barr P P C P Guindazzi fficina entr P ianura rencia raiano P C Vittorio Dante to isani ia Giornate Morghen Emanuele t v v o o o e Montesanto S.Maria Bartolo Longo Madonna dell’Arco Via del Pozzo 5 8 C Gianturco S.Giorgio Grotta Vanvitelli Fuga A Toledo S. Anastasia Università Porta 3 a Cremano del Sole Petraio Corso Vittorio Nolana S. Giorgio Cavalli di Bronzo Villa Augustea ostruzione Cimarosa Emanuele 3 12131415 Portici Bellavista Somma Vesuviana Licola B Palazzolo linea 7 in c Augusteo Municipio Immacolatella Portici Via Libertà Quarto Corso Vittorio Emanuele A Porto di Napoli Rione Trieste Ercolano Scavi Marina di Marano Corso Vittorio Ottaviano di Licola Emanuele Parco S.Giovanni Barra 2 Ercolano Miglio d’Oro Fuorigrotta Margherita ostruzione S. -

Apartments Museo (Museo 101 E Museo 201) Via Salvatore Tommasi, 65 – Napoli Tel
Apartments Museo (Museo 101 e Museo 201) Via Salvatore Tommasi, 65 – Napoli Tel. +39 081 19 33 93 01 - Whatsapp: +39 373 751 82 77 From Garibaldi Central Station: - BY METRO: Line 1, Direction Piscinola. Stop: Museo. Outside the metro station you’ll be in Via Foria, turn right towards the National Archaeological Museum. At the intersection turn right, cross the road and take the little road to the left slightly uphill, until you reach Via Salvatore Tommasi n ° 65. Ticket price: euro 1,00 per person. - BY METRO: Line 2, Direction Pozzuoli. Stop: Cavour. Outside the metro station you’ll be in Via Foria, turn right towards the National Archaeological Museum. At the intersection turn right, cross the road and take the little road to the left slightly uphill, until you reach Via Salvatore Tommasi n ° 65. - BY TAXI: ask for the tariffa comunale before getting in the taxi. It's a fixed price of euro 12,50 from the train station to the National Archeological Museum. Then from there you can walk to us, as shown in the map. From Capodichino Airport: - BY TAXI: there’s no fixed rate from airport to National Museum. So, try to fix a reasonable price before getting in the taxi. - BY ALIBUS: it's a shuttle from the airport to the city centre. Ticket price euro 5,00 (you can buy ticket on the bus). Your stop will be in Central Station (Piazza Garibaldi). From there you can take the metro: - METRO LINEA 1 : direction Piscinola, Stop Museo. Follow the instructions as described above. -

Vomero, but Right by a Funicular Ride Into the Centre
Page 66 S1 Escape: Budget break Daily Mail, Saturday, March 2, 2019 Naples for less than £100 a night WITH Mount Vesuvius looming in the distance, Mediterranean waves slapping on the harbour walls, ancient castles, trips of Pompeii and labyrinthine lanes, Naples is perfect for an intriguing weekend away. The capital of the Campania region in southern Italy is famous for its manic edginess — as well as the invention of pizza — and can be an affordable choice for a short dei Tr break ... if you know where to look. Via ibu nali aribaldi Where to stay omero G ÷ Attico Partenopeo V tation IN THE heart of the old town, this S bijou eight-room hotel/B&B is hidden at the top of an apartment Vibrant: Clockwise block; you take a lift to the fifth floor reception. Rooms have comfortable from top left, Neapolitan beds, modern art and balconies (in pizza, a traditional street some) facing Vesuvius. Organic unicular scene and minimalist breakfast is served in a bright dining F Hotel Palazzo Caracciolo room or on a suntrap terrace. B&B doubles from £61; add £17.50 for Vesuvius views (atticopartenopeo.it) ÷ Hotel Cimarosa ON A hill in the peaceful residential district of Vomero, but right by a funicular ride into the centre, Getting there Y Cimarosa is an arty hotel with 16 modern rooms. This is a great British AirwaYS has ett return flights from / G hideaway for those seeking to escape the old town’s bustle. London Gatwick to Naples alli B&B doubles from £69 from £48 (ba.com). -
DLA Piper. Details of the Member Entities of DLA Piper Are Available on the Website
EUROPEAN PPP REPORT 2009 ACKNOWLEDGEMENTS This Report has been published with particular thanks to: The EPEC Executive and in particular, Livia Dumitrescu, Goetz von Thadden, Mathieu Nemoz and Laura Potten. Those EPEC Members and EIB staff who commented on the country reports. Each of the contributors of a ‘View from a Country’. Line Markert and Mikkel Fritsch from Horten for assistance with the report on Denmark. Andrei Aganimov from Borenius & Kemppinen for assistance with the report on Finland. Maura Capoulas Santos and Alberto Galhardo Simões from Miranda Correia Amendoeira & Associados for assistance with the report on Portugal. Gustaf Reuterskiöld and Malin Cope from DLA Nordic for assistance with the report on Sweden. Infra-News for assistance generally and in particular with the project lists. All those members of DLA Piper who assisted with the preparation of the country reports and finally, Rosemary Bointon, Editor of the Report. Production of Report and Copyright This European PPP Report 2009 ( “Report”) has been produced and edited by DLA Piper*. DLA Piper acknowledges the contribution of the European PPP Expertise Centre (EPEC)** in the preparation of the Report. DLA Piper retains editorial responsibility for the Report. In contributing to the Report neither the European Investment Bank, EPEC, EPEC’s Members, nor any Contributor*** indicates or implies agreement with, or endorsement of, any part of the Report. This document is the copyright of DLA Piper and the Contributors. This document is confidential and personal to you. It is provided to you on the understanding that it is not to be re-used in any way, duplicated or distributed without the written consent of DLA Piper or the relevant Contributor. -
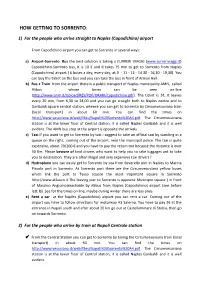
How Getting to Sorrento
HOW GETTING TO SORRENTO: 1) For the people who arrive straight to Naples (Capodichino) airport From Capodichino airport you can get to Sorrento in several ways: a) Airport-Sorrento Bus the best solution is taking a CURRERI VIAGGI (www.curreriviaggi.it) Capodichino-Sorrento bus, it is 10 € and it takes 75 min to get to Sorrento from Naples (Capodichino) airport ( 6 buses a day, every day, at 9 - 11 - 13 - 14.30 - 16,30 - 19,30). You can buy the ticket on the bus and you can take the bus in front of Arrival Hall. b) Bus + Train from the airport there is a public transport of Naples municipality AMN, called Alibus , whose times can be seen on-line (http://www.anm.it/Upload/RES/PDF/ORARI/Capodichino.pdf). The ticket is 3€, it leaves every 20 min, from 6,30 to 24,00 and you can go straight both to Naples centre and to Garibaldi square central station, whence you can get to Sorrento by Circumvesuviana train (local transport) in about 60 min. You can find the times on http://www.vesuviana.it/web/files/Napoli%20Sorrento%20A4.pdf. The Circumvesuviana station is at the lower floor of Central station, it is called Naples Garibaldi and it is well evident. The AMN bus stop at the airport is opposite the arrivals. c) Taxi If you want to get to Sorrento by taxi I suggest to take an official taxi by standing in a queue on the right, coming out of the airport, near the municipal police. The taxi is quite expensive, about 70/100 € and you have to pay the return too because the distance is over 50 Km. -

Research Article the Impact of Urban Transit Systems on Property Values: a Model and Some Evidences from the City of Naples
Hindawi Journal of Advanced Transportation Volume 2018, Article ID 1767149, 22 pages https://doi.org/10.1155/2018/1767149 Research Article The Impact of Urban Transit Systems on Property Values: A Model and Some Evidences from the City of Naples Mariano Gallo Dipartimento di Ingegneria, Universita` del Sannio, Piazza Roma 21, 82100 Benevento, Italy Correspondence should be addressed to Mariano Gallo; [email protected] Received 9 October 2017; Revised 30 January 2018; Accepted 21 February 2018; Published 5 April 2018 Academic Editor: David F. Llorca Copyright © 2018 Mariano Gallo. Tis is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. A hedonic model for estimating the efects of transit systems on real estate values is specifed and calibrated for the city of Naples. Te model is used to estimate the external benefts concerning property values which may be attributed to the Naples metro at the present time and in two future scenarios. Te results show that only high-frequency metro lines have appreciable efects on real estate values, while low-frequency metro lines and bus lines produce no signifcant impacts. Our results show that the impacts on real estate values of the metro system in Naples are signifcant, with corresponding external benefts estimated at about 7.2 billion euros or about 8.5% of the total value of real estate assets. 1. Introduction lower environmental impacts produced by less use of private cars, investments in transit systems, especially in railways Urban transit systems play a fundamental role for the social and metros, may generate an appreciable increase in property and economic development of large urban areas, as well as values in the zones served; this beneft should be explicitly signifcantly afecting the quality of life in such areas. -

Freezing in Naples Underground
THE ARTIFICIAL GROUND FREEZING TECHNIQUE APPLICATION FOR THE NAPLES UNDERGROUND Giuseppe Colombo a Construction Supervisor of Naples underground, MM c Technicalb Director MM S.p.A., via del Vecchio Polit Abstract e Technicald DirectorStudio Icotekne, di progettazione Vico II S. Nicola Lunardi, all piazza S. Marco 1, The extension of the Naples Technical underground Director between Rocksoil Pia S.p.A., piazza S. Marc Direzionale by using bored tunnelling methods through the Neapo Cassania to unusually high heads of water for projects of th , Pietro Lunardi natural water table. Given the extreme difficulty of injecting the mater problem of waterproofing it during construction was by employing artificial ground freezing (office (AGF) district) metho on Line 1 includes 5 stations. T The main characteristics of this ground treatment a d with the main problems and solutions adopted during , Vittorio Manassero aspects of this experience which constitutes one of Italy, of the application of AGF technology. b , Bruno Cavagna e c S.p.A., Naples, Giovanna e a Dogana 9,ecnico Naples 8, Milan ion azi Sta o led To is type due to the presence of the Milan zza Dante and the o 1, Milan ial surrounding thelitan excavation, yellow tuff, the were subject he stations, driven partly St taz Stazione M zio solved for four of the stations un n Università ic e ds. ip Sta io zione Du e omo re presented in the text along the major the project examples, and theat leastsignificant in S t G ta a z r io iibb n a e Centro lldd i - 1 - 1. -
Guida Di Tutte Le Linee Anm in Esercizio
GUIDA DI TUTTE LE LINEE ANM IN ESERCIZIO URBANE, EXTRAURBANE E NOTTURNE, LINEE METROPOLITANE, FUNICOLARI, E DEGLI ALTRI SERVIZI PRINCIPALI DI TRASPORTO PUBBLICO E TURISTICI DELLA CITTA’ DI NAPOLI aggiornata al 23 giugno 2006 Sede legale: Via G.B. Marino, 1 – 80125 - NAPOLI – Tel.: 081-7631111 Servizio Clienti: 800-639525 / 081-7632177 – Fax: 081-7632070 Orario Servizio Clienti: dal lunedi al sabato 7.30 - 20.30 – domenica e festivi 7.00 - 14.00 Internet Web: http://www.anm.it - E-mail: [email protected] LEGENDA TABELLE LINEE ANM Percorso nei due sensi con gli stazionamenti evidenziati in neretto. (Il simbolo accanto al numero di linea ne indica l’esercizio Estremi percorso con vetture predisposte al trasporto di persone disabili) n. Eventuali note e variazioni linea Prima e ultima partenza dal primo stazionamento: Frequenza (in minuti): NO = non in servizio feriale, sabato e festivo nd = non disponibile Prima e ultima partenza dal secondo stazionamento, oppure feriale sabato festivi primo ed ultimo passaggio per l’altro estremo del percorso: feriale, sabato e festivo AVVERTENZE - Le linee possono subire limitazioni o deviazioni di percorso anche senza preavviso. Non sono riportate variazioni, deviazioni e limitazioni temporanee di percorso causate da interruzioni stradali o altri impedimenti, fatta eccezione per quelle di lunga durata, oppure se trattasi di linee straordinarie o sostitutive il cui esercizio è prolungato nel tempo. Non sono altresì riportate le linee temporanee o speciali istituite per brevi periodi in occasione di manifestazioni particolari (spettacoli, mostre, ecc.), le cui modalità sono solitamente rese note a mezzo stampa. - Si tenga inoltre presente che gli intervalli e le frequenze di transito sono da intendersi indicativi in quanto dipendenti dalle condizioni di viabilità e dal traffico cittadino. -

Second University of Naples and History
The Second University of Naples The Second University of Naples (SUN) (https://www.unina2.it) was established in 1991 (MURST, 25 March). On the official date of November 1st 1991, the Second University began to function autonomously with nineteen thousand enrolments and eight faculties located in five different territorial areas of Caserta and Naples. Currently, there are thirty thousand students attending the SUN’s 19 Departments. The University multi-campus structure has two offices for its Rector: one in Naples and one in the Royal Palace of Caserta. The meeting will take place in “Sala Conferenze della Facoltà di Medicina e Chirurgia” located at Via S. M. di Costantinopoli, 104. How to reach Sala Conferenze della Facoltà di Medicina e Chirurgia” Via S. M. di Costantinopoli, 104 from Capodichino International Airport: By taxi: The Naples taxi tariff system offers both meter rates and fixed tariffs. All taxis are required to display the Tariff Card (in Italian and English) on the back of the front seat of the taxi to allow the rider to choose either a metered journey or fixed tariff price. If you want a fixed tariff rate however, you must tell the driver that before proceeding. Table reporting fixed tariff is attached to this document. By Alibus: fast connection line between the airport and the city center. Makes five stops only: Airport, Via Arenaccia (bus lanes), Piazza Garibaldi (metro station L1 and L2), Piazza Municipio (Beverello sea-port and metro station L1), National Square (bus lane) that allow both to reach points of leaving the city that major interchanges to move across Naples. -

Particulate Matter Concentrations in a New Section of Metro Line: a Case Study in Italy
Computers in Railways XIV 523 Particulate Matter concentrations in a new section of metro line: a case study in Italy A. Cartenì1 & S. Campana2 1Department of Civil, Construction and Environmental Engineering, University of Naples Federico II, Italy 2Department of Industrial Engineering and Information, Second University of Naples, Italy Abstract All round the world, many studies have measured elevated concentrations of Particulate Matter (PM) in underground metro systems, with non-negligible implications for human health due to protracted exposition to fine particles. Starting from this consideration, the aim of this research was to investigate what is the “aging time” needed to measure high PM concentrations also in new stations of an underground metro line. This was possible taking advantage of the opening, in December 2013, of a new section of the Naples (Italy) line 1 railways. The Naples underground metro line 1 before December 31 was long – about 13 km with 14 stations. The new section, opened in December, consists of 5 new kilometres of line and 3 new stations. During the period December 2013– January 2014, an extensive sampling survey was conducted to measure PM10 concentrations both in the “historical” stations and in the “new” ones. The results of the study are twofold: a) the PM10 concentrations measured in the historical stations confirm the average values of literature; b) just a few days after the opening of the new metro section, high PM10 concentrations were also measured in the new stations with average PM10 values comparable (from a statistical point of view) with those measured in the historical stations of the line.