Creating Illusion in Computer Aided Performance
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
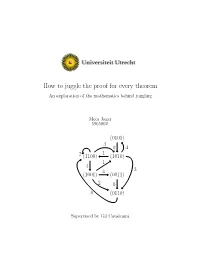
How to Juggle the Proof for Every Theorem an Exploration of the Mathematics Behind Juggling
How to juggle the proof for every theorem An exploration of the mathematics behind juggling Mees Jager 5965802 (0101) 3 0 4 1 2 (1100) (1010) 1 4 4 3 (1001) (0011) 2 0 0 (0110) Supervised by Gil Cavalcanti Contents 1 Abstract 2 2 Preface 4 3 Preliminaries 5 3.1 Conventions and notation . .5 3.2 A mathematical description of juggling . .5 4 Practical problems with mathematical answers 9 4.1 When is a sequence jugglable? . .9 4.2 How many balls? . 13 5 Answers only generate more questions 21 5.1 Changing juggling sequences . 21 5.2 Constructing all sequences with the Permutation Test . 23 5.3 The converse to the average theorem . 25 6 Mathematical problems with mathematical answers 35 6.1 Scramblable and magic sequences . 35 6.2 Orbits . 39 6.3 How many patterns? . 43 6.3.1 Preliminaries and a strategy . 43 6.3.2 Computing N(b; p).................... 47 6.3.3 Filtering out redundancies . 52 7 State diagrams 54 7.1 What are they? . 54 7.2 Grounded or Excited? . 58 7.3 Transitions . 59 7.3.1 The superior approach . 59 7.3.2 There is a preference . 62 7.3.3 Finding transitions using the flattening algorithm . 64 7.3.4 Transitions of minimal length . 69 7.4 Counting states, arrows and patterns . 75 7.5 Prime patterns . 81 1 8 Sometimes we do not find the answers 86 8.1 The converse average theorem . 86 8.2 Magic sequence construction . 87 8.3 finding transitions with flattening algorithm . -

Resource Links Hello Everyone French Titles Reviewed in This Issue Growth of the School Library Learn- P
Editor’s Comments Resource Links Hello Everyone French titles reviewed in this issue growth of the school library learn- P. O. Box 9 which will be of great use to our ing commons in Canada and to Pouch Cove, NL Welcome to volume 22 of French first language and French developing a national network of Resource Links. I hope everyone immersion clientele. school library practitioners and A0A 3L0 had an enjoyable and relaxing I want to welcome Gail Sidonie supporters. For more information Tel: 709-335-2394 summer with lots of time to read Sobat to this issue. Gail is the new check out the website at http:// some of the great books which our editor of our October feature col- www.canadianschoollibraries.ca/ Fax: 709-335-2978 Canadian authors and publishers umn 2016 Contemporary Adult Also replacing the CLA we have E-mail:resourcelinks@nl. are bringing to our children and Titles for Strong Readers. She has the new Canadian Federation of rogers.com young adults. taken over from Margaret Mackey Library Associations which is be- This issue is full of new titles who started the column many years ing established to provide a united which our reviewers have been ago, and is bringing us the same voice for Canadian libraries. For busy reading and reviewing over quality reviews of these adult titles more information on this group Volume 22, Number 1 the summer months. We have which we have grown to expect. check out their website at https:// quite a number of books for the Thanks to Gail and her committee librarianship.ca/news/cfla-fcab- youngest readers and pre-readers of reviewers. -
IJA Enewsletter Editor Don Lewis (Email: [email protected]) Renew At
THE INTERNATIONAL JUGGLERS’ ASSOCIATION June 2015 IJA eNewsletter editor Don Lewis (email: [email protected]) Renew at http://www.juggle.org/renew IJA eNewsletter IJA Festival July 20 - 26, 2015 Quebec City, QC, Canada Register online soon! Discounts on Contents: Event Packages end June 30! IJA Pre-Reg Deadline Only Days Away Full info is on our website: Chairman’s Message www.juggle.org/festival IJA Election - New, Vote Online! Candidates’ Statements After June 30th, Stage Championships Finalists Register in Person at the Festival IJA Festival Information Online IJA Fest’s Special Guests See fest details starting on page 4, Festival Checklist where the Championships Finalists are listed! WJD shirts, YJA badges in IJA Store What’s New at eJuggle Coming Soon to eJuggle... Juggling Festivals Juggling Festivals: Lincolnshire, UK Eugene, OR Quebec City, Quebec, Canada (IJA) Collinée en Bretagne, France Bruneck, South Tyrol, Italy (EJC) Montpeyroux, France Garsington, Oxfordshire, UK Cleveland, OH Portland, OR Kansas City, MO Philadelphia, PA Fukushima, Japan Ottumwa, IA WWW.JUGGLE.ORG Page 1 THE INTERNATIONAL JUGGLERS’ ASSOCIATION June 2015 Chairman’s Message, by Nathan Wakefield - Obstacle course: $500 - Waterballoon slip and slide: $200 - Drinks and flair bartender: $200 - Onsite massage therapist: $1,000 - Cardboard box castle building contest: $60 - Pinata filled with juggling props: $250 - Tye Dye $60 "To render assistance to fellow jugglers." - Food. $1,630 and the remainder of any additional funds. Special thanks to donor Unna Med and all those who Less than one month until the 2015 IJA Festival in contributed towards this fund of awesomeness! Quebec City! It's been a long road of hard work for our festival team If logistics is an issue for you, we have rideboards and officers, but everything is in place for this year's available on both our festival forum and on Facebook. -

Inspiring Mathematical Creativity Through Juggling
Journal of Humanistic Mathematics Volume 10 | Issue 2 July 2020 Inspiring Mathematical Creativity through Juggling Ceire Monahan Montclair State University Mika Munakata Montclair State University Ashwin Vaidya Montclair State University Sean Gandini Follow this and additional works at: https://scholarship.claremont.edu/jhm Part of the Arts and Humanities Commons, and the Mathematics Commons Recommended Citation Monahan, C. Munakata, M. Vaidya, A. and Gandini, S. "Inspiring Mathematical Creativity through Juggling," Journal of Humanistic Mathematics, Volume 10 Issue 2 (July 2020), pages 291-314. DOI: 10.5642/ jhummath.202002.14 . Available at: https://scholarship.claremont.edu/jhm/vol10/iss2/14 ©2020 by the authors. This work is licensed under a Creative Commons License. JHM is an open access bi-annual journal sponsored by the Claremont Center for the Mathematical Sciences and published by the Claremont Colleges Library | ISSN 2159-8118 | http://scholarship.claremont.edu/jhm/ The editorial staff of JHM works hard to make sure the scholarship disseminated in JHM is accurate and upholds professional ethical guidelines. However the views and opinions expressed in each published manuscript belong exclusively to the individual contributor(s). The publisher and the editors do not endorse or accept responsibility for them. See https://scholarship.claremont.edu/jhm/policies.html for more information. Inspiring Mathematical Creativity Through Juggling Ceire Monahan Department of Mathematical Sciences, Montclair State University, New Jersey, USA -

Happy Birthday!
THE THURSDAY, APRIL 1, 2021 Quote of the Day “That’s what I love about dance. It makes you happy, fully happy.” Although quite popular since the ~ Debbie Reynolds 19th century, the day is not a public holiday in any country (no kidding). Happy Birthday! 1998 – Burger King published a full-page advertisement in USA Debbie Reynolds (1932–2016) was Today introducing the “Left-Handed a mega-talented American actress, Whopper.” All the condiments singer, and dancer. The acclaimed were rotated 180 degrees for the entertainer was first noticed at a benefit of left-handed customers. beauty pageant in 1948. Reynolds Thousands of customers requested was soon making movies and the burger. earned a nomination for a Golden Globe Award for Most Promising 2005 – A zoo in Tokyo announced Newcomer. She became a major force that it had discovered a remarkable in Hollywood musicals, including new species: a giant penguin called Singin’ In the Rain, Bundle of Joy, the Tonosama (Lord) penguin. With and The Unsinkable Molly Brown. much fanfare, the bird was revealed In 1969, The Debbie Reynolds Show to the public. As the cameras rolled, debuted on TV. The the other penguins lifted their beaks iconic star continued and gazed up at the purported Lord, to perform in film, but then walked away disinterested theater, and TV well when he took off his penguin mask into her 80s. Her and revealed himself to be the daughter was actress zoo director. Carrie Fisher. ©ActivityConnection.com – The Daily Chronicles (CAN) HURSDAY PRIL T , A 1, 2021 Today is April Fools’ Day, also known as April fish day in some parts of Europe. -

Fargo Convention Well Worth the Journey
August 1980 Vol. 32 No. 5 Membership—1,200 1981 Convention Site—Cleveland, OH, Case Western Reserve University Fargo convention well worth the journey In anticipation of sharing talent and watching jugglers in the crowded party room witti the promise Benefit shows for crowds at the NDSU student some of the best jugglers in North America at work, of greater support if the IJA would return to Fargo union, the Red River Mall, a Shrine club and a 475 people trekked through mid July heat to Faigo, nextyear. Reaction was not positive, and conven- nursing home demonstrated IJA’s appreciation ND, site of the 33rd IJA annual convention, tioneers later voted Cleveland. OH, as the 1981 for the hospitality, There, close by the geographical center of the site (see page 6). The convention ran smoothly, and largely on time. continent, they witnessed the basics—like 3-ball High-rise lodging contained two-story foyer areas and 5-club cascades—and the outer limits of jug that were ideal for juggling. The university food gling skill, as demonstrated by Michael Kass’s prize service fed 165 jugglers three times day, and cater winning performance of club kick-ups. The same ed a pleasant outdcxar "buffalo" barbeque at Troll- lure of communion with fellow jugglers has drawn wood Park on Saturday. this group together annually since 1947, when The Saturday morning parade included many the founding fathers formed the group during a other area groups, and was aired by NBC news convention of the international Brotherhood of on a late-night broadcast. -

Car Agency in Lakewood Going to the Dogs!
July 7th, 2016 The Ocean County Gazette - www.ocgazette.news 1 The OC Gazette P.O. Box 577 Seaside Heights NJ 08751 On The Web at: www.ocgazette.news JULY 29TH, 2016 VOL. 16 NO. 570 THIS WEEKS Car Agency in Lakewood Going ALERT SHERIFF’S ISSUE OFFICER CATCHES Pages 8-9 to the Dogs! Ocean County POSSIBLE BURGLARY Featured Events FROM COURTROOM Pages 10-11 Ocean County WINDOW; WARRANT Library Weekend Events and ISSUED Exhibits TOMS RIVER – The keen eye of Pages 12-13 an Ocean County Sheriff’s Officer Ocean County caught a suspicious male gaining Artists Guild entry into an apartment on Washington Street in the downtown Page - 16-17 area on July 21. And now, that Long Beach Island Foundation of the person has a warrant out for his Arts & Sciences arrest on charges of burglary, theft Events and criminal trespassing. According to a report provided Page 25 by Ocean County Sheriff Michael Museums, Historic, G. Mastronardy, Sheriff’s Officer Arts & Exhibits Robert Mazur was just completing Photo credits: Courtesy of Caregiver Volunteers; Picture of Alice, courtesy of Michael his security detail around noon in Page 25 Bagley Photography Alice, Lavallette, with Golden Retriever Simon Courtroom 214 on the third floor A Summary of of 213 Washington St., when he Comedy & Stage glanced out the window toward the Performances Kick off the “Dog Days of Summer” $5.00 to the nonprofit Caregiver with a celebration of Caregivers, Canines® program for every vehicle Harbor Front Condominiums at 215 Page 27-34 Canines, and Cars at the Larson Ford sold during the Caregivers, Canines, Washington Street. -
Class of 1965 50Th Reunion
CLASS OF 1965 50TH REUNION BENNINGTON COLLEGE Class of 1965 Abby Goldstein Arato* June Caudle Davenport Anna Coffey Harrington Catherine Posselt Bachrach Margo Baumgarten Davis Sandol Sturges Harsch Cynthia Rodriguez Badendyck Michele DeAngelis Joann Hirschorn Harte Isabella Holden Bates Liuda Dovydenas Sophia Healy Helen Eggleston Bellas Marilyn Kirshner Draper Marcia Heiman Deborah Kasin Benz Polly Burr Drinkwater Hope Norris Hendrickson Roberta Elzey Berke Bonnie Dyer-Bennet Suzanne Robertson Henroid Jill (Elizabeth) Underwood Diane Globus Edington Carol Hickler Bertrand* Wendy Erdman-Surlea Judith Henning Hoopes* Stephen Bick Timothy Caroline Tupling Evans Carla Otten Hosford Roberta Robbins Bickford Rima Gitlin Faber Inez Ingle Deborah Rubin Bluestein Joy Bacon Friedman Carole Irby Ruth Jacobs Boody Lisa (Elizabeth) Gallatin Nina Levin Jalladeau Elizabeth Boulware* Ehrenkranz Stephanie Stouffer Kahn Renee Engel Bowen* Alice Ruby Germond Lorna (Miriam) Katz-Lawson Linda Bratton Judith Hyde Gessel Jan Tupper Kearney Mary Okie Brown Lynne Coleman Gevirtz Mary Kelley Patsy Burns* Barbara Glasser Cynthia Keyworth Charles Caffall* Martha Hollins Gold* Wendy Slote Kleinbaum Donna Maxfield Chimera Joan Golden-Alexis Anne Boyd Kraig Moss Cohen Sheila Diamond Goodwin Edith Anderson Kraysler Jane McCormick Cowgill Susan Hadary Marjorie La Rowe Susan Crile Bay (Elizabeth) Hallowell Barbara Kent Lawrence Tina Croll Lynne Tishman Handler Stephanie LeVanda Lipsky 50TH REUNION CLASS OF 1965 1 Eliza Wood Livingston Deborah Rankin* Derwin Stevens* Isabella Holden Bates Caryn Levy Magid Tonia Noell Roberts Annette Adams Stuart 2 Masconomo Street Nancy Marshall Rosalind Robinson Joyce Sunila Manchester, MA 01944 978-526-1443 Carol Lee Metzger Lois Banulis Rogers Maria Taranto [email protected] Melissa Saltman Meyer* Ruth Grunzweig Roth Susan Tarlov I had heard about Bennington all my life, as my mother was in the third Dorothy Minshall Miller Gail Mayer Rubino Meredith Leavitt Teare* graduating class. -

In-Jest-Study-Guide
with Nels Ross “The Inspirational Oddball” . Study Guide ABOUT THE PRESENTER Nels Ross is an acclaimed performer and speaker who has won the hearts of international audiences. Applying his diverse background in performing arts and education, Nels works solo and with others to present school assemblies and programs which blend physical theater, variety arts, humor, and inspiration… All “in jest,” or in fun! ABOUT THE PROGRAM In Jest school assemblies and programs are based on the underlying principle that every person has value. Whether highlighting character, healthy choices, science & math, reading, or another theme, Nels employs physical theater and participation to engage the audience, juggling and other variety arts to teach the concepts, and humor to make it both fun and memorable. GOALS AND OBJECTIVES This program will enhance awareness and appreciation of physical theater and variety arts. In addition, the activities below provide connections to learning standards and the chosen theme. (What theme? Ask your artsineducation or assembly coordinator which specific program is coming to your school, and see InJest.com/schoolassemblyprograms for the latest description.) GETTING READY FOR THE PROGRAM ● Arrange for a clean, well lit SPACE, adjusting lights in advance as needed. Nels brings his own sound system, and requests ACCESS 4560 minutes before & after for set up & take down. ● Make announcements the day before to remind students and staff. For example: “Tomorrow we will have an exciting program with Nels Ross from In Jest. Be prepared to enjoy humor, juggling, and stunts in this uplifting celebration!” ● Discuss things which students might see and terms which they might not know: Physical Theater.. -

The Compass, October 31, 2005
THE~C The Student Voice of Gainesville State College Vol. XL No. 2 October 31, 2005 Gainesville Siale College! Regents Approve GC Bid to Grant 4-year Degrees By Jessi Stone easier to remember. is www.gsc. Editor~in-Ch i ef edu and in January,lhe new email [email protected] fonnal will be [email protected] Don'l frel because the old Peach On Oct. 12. The Board of Re Net fonnal will sti ll work for one gents voted in favor of a new to two years until me transi tion is mission statemenllhal will allow completc. Besides the ncw name ase to offer the first in a series and email addresses. Nesbitt said of four-year baccalaureate pro GSC will still be mainly focused grams. The first four-year degree on Ihe first two year programs. that GSC will offer beginning Rest assured that luition will nOI next fall is a Bachelor of Science increase for students who are in Applied Environmental Sp..'ltial pursuing an Associale's degree aI Analysis. This bachelor's degree GSC. is not offered at any other institu GC has been Irying to become tion in the stale of Georgia. a four-year institution since 2002 The Iwo other baccalaureate when the chancellor announced programs that have been pro the opponunity for two-year col posed for the near future arc Ear leges to review their mission and ly Childhood Care and Education propose changes. GSC has now and Applied Business Tedmol enlercd into a new category of ogy. These programs have been chosen W10slly because GSC al Unh·erslty System of Georgia in ready has the facully as well as Ihe sti tutions. -
Volume 4 No 4 (October 1977)
VOLOMB 4 110 •• OCT. 197? ( 592 Miami Street Of'ticial Organ UMICYCLINO socmY OF &MER!Cl Inc. (§)1977 ill Rts Rea. Marion, Ohio 43302 Year}J' Membership S5 Includes 1'enletter (4) ID Card - See Blank Pg.18 omcERS FEL!m UNICYCLISTS: The 1977 National trnieycle Meet went off on sched w.e Aug. 20,21.st in Marion, <llio arxl the general conaensus seems to Pree. Paul Fox be that it was eTen better than last year's• Saturday's weather was a V.Pree. R.Tschud:1.n bit cooler than previous years, a trley beautiful day, and just per Sec. T. Di.ck Haines fect for unicycling. At last minute the meet host The Paul Fox Uni cycle Club Iie. ot Marion vaa able to make arrangements to hold the POUNDER MPMBEBS races at the Tri Rivera SChool about two miles from the site of the Bernard Crandall morning activities at the Marion Catholic High School. The races were Paul & Nancy Fox run oft there Saturday aftemoon am many boys and girls made happy. Peter Hangach A comment received by 70ur ed. in mall this week fran one contestant Patricia Herron stated: nI likedthe informality of. the races am believe most of the Bill Jenack kids did - it took a lot of pressure off everyone and made the whole Gordon Kruse meet most enjoyable". The Sur.da;r morning meeting at MoDonalda proved Steve McPeak , to be an excellent idea with a far larger attendance than ever before Fr. Ju. J. Moran and the business meeting was carried on smoot~ and quic~ and was Dr. -

Francis Brunn Performed in the Center Ring Alone, with All Activity Shut Down in the Side Rings
Volume 30, Number 6 October/November, 1978 INTERNATIONAL JUGGLERS ASSOCIATION “The Greatest Juggler Since the Dawn of Creation.” At this time the Ringling Circus Show was top on the bill. Francis Brunn performed in the center ring alone, with all activity shut down in the side rings. He was announced as “The World’s Greatest Juggler - greater and ten times faster than Rastelli.” After three years with the Ringling Circus, Francis Brunn left with his sister Lotte, who had her own juggling act since 1951. He was already recognized as the outstanding juggler in the U.S. It was then that his world career - as a juggler in a new style - began. Francis Brunn appeared in a black suit and introduced dancing steps in a Flamenco style into his act. Francis Brunn is the only variety artist who has ever worked as co-star to the big American artists in almost every famous hotel along “the strip” in Las Vegas. This great juggler has given command performances for the royal families in London and Amsterdam, and has also performed for President Eisenhower in the White House. His juggling skill won him the Circus Hall of Fame Award in 1969 and the Rastelli Award in 1970 at the World Juggling Concur rence in Bergamo, Italy. Francis Brunn has been acclaimed the world’s greatest juggler for over forty years by critics and audiences who have witnessed his mastery all over the globe. He is the cont. p. 3 f Francis Brunn by KARL-HEINZ ZIETHEN Francis Brunn, world famous juggler genius a la Barishnikov, has appeared since September 4 in Atlantic Ci ty, New Jersey, at the Resorts International Hotel.