Chapter 4 Rf/If Circuits
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Sea 222 Operator's Manual
I SEA 222 OPERATOR'S MANUAL Featuring a unique "softouch" keypad, the SEA 222 is as easy to operate as a microwave oven. Just follow the directions in this booklet. The "brain" of the SEA 222 is divided into two parts: 1. 290 factory programmed frequency pairs selectable by channel number from EPROM memory. 2. 100 channels of "scratch pad" memory for front panel programming and recall (Note: 10 of these channels are "EMERGENCY" channels). When operating your SEA 222 please note: 1. Any two-digit key stroke followed by "enter" will recall user-programmed channels 10-99; 2. Any 3 and 4-digit key stroke followed by "enter" recalls factory -pro grammed channels. - ---- - - A UNIT OF DATAMARINE INTERNATIONAL, INC. I ( ( FRONT PANEL CONTROLS: DISPLAY: The eight-digit alphanumeric display provides the operator with frequency and channel data. 4 x 4 KEYPAD 16 keys allow the operator to communicate with the computer which controls radio functions. For simple operation, an "operator friendly" software package is used in conjunction with the display. All of the keys are listed below. ENT Enters previously keyed data into the computer. Number Keys Keys numbered 0 through 9 enter required numerical data into the computer. (Arrows) These keypads permit receiver tuning up or down in 100 Hz ..... steps. CH/FR Allows the operator to display either channel number or the frequency of operation. Example: pressing this key when the display reads "CHAN 801" causes the display to indicate the receiver operating frequency 'assigned to channel number 801 (8718.9 KHz). SQL Activates or deactivates the voice operated squelch system. -

Toward a Large Bandwidth Photonic Correlator for Infrared Heterodyne Interferometry a first Laboratory Proof of Concept
A&A 639, A53 (2020) Astronomy https://doi.org/10.1051/0004-6361/201937368 & c G. Bourdarot et al. 2020 Astrophysics Toward a large bandwidth photonic correlator for infrared heterodyne interferometry A first laboratory proof of concept G. Bourdarot1,2, H. Guillet de Chatellus2, and J-P. Berger1 1 Univ. Grenoble Alpes, CNRS, IPAG, 38000 Grenoble, France e-mail: [email protected] 2 Univ. Grenoble Alpes, CNRS, LIPHY, 38000 Grenoble, France Received 19 December 2019 / Accepted 17 May 2020 ABSTRACT Context. Infrared heterodyne interferometry has been proposed as a practical alternative for recombining a large number of telescopes over kilometric baselines in the mid-infrared. However, the current limited correlation capacities impose strong restrictions on the sen- sitivity of this appealing technique. Aims. In this paper, we propose to address the problem of transport and correlation of wide-bandwidth signals over kilometric dis- tances by introducing photonic processing in infrared heterodyne interferometry. Methods. We describe the architecture of a photonic double-sideband correlator for two telescopes, along with the experimental demonstration of this concept on a proof-of-principle test bed. Results. We demonstrate the a posteriori correlation of two infrared signals previously generated on a two-telescope simulator in a double-sideband photonic correlator. A degradation of the signal-to-noise ratio of 13%, equivalent to a noise factor NF = 1:15, is obtained through the correlator, and the temporal coherence properties of our input signals are retrieved from these measurements. Conclusions. Our results demonstrate that photonic processing can be used to correlate heterodyne signals with a potentially large increase of detection bandwidth. -

RANDOM VIBRATION—AN OVERVIEW by Barry Controls, Hopkinton, MA
RANDOM VIBRATION—AN OVERVIEW by Barry Controls, Hopkinton, MA ABSTRACT Random vibration is becoming increasingly recognized as the most realistic method of simulating the dynamic environment of military applications. Whereas the use of random vibration specifications was previously limited to particular missile applications, its use has been extended to areas in which sinusoidal vibration has historically predominated, including propeller driven aircraft and even moderate shipboard environments. These changes have evolved from the growing awareness that random motion is the rule, rather than the exception, and from advances in electronics which improve our ability to measure and duplicate complex dynamic environments. The purpose of this article is to present some fundamental concepts of random vibration which should be understood when designing a structure or an isolation system. INTRODUCTION Random vibration is somewhat of a misnomer. If the generally accepted meaning of the term "random" were applicable, it would not be possible to analyze a system subjected to "random" vibration. Furthermore, if this term were considered in the context of having no specific pattern (i.e., haphazard), it would not be possible to define a vibration environment, for the environment would vary in a totally unpredictable manner. Fortunately, this is not the case. The majority of random processes fall in a special category termed stationary. This means that the parameters by which random vibration is characterized do not change significantly when analyzed statistically over a given period of time - the RMS amplitude is constant with time. For instance, the vibration generated by a particular event, say, a missile launch, will be statistically similar whether the event is measured today or six months from today. -

Electronic Warfare Fundamentals
ELECTRONIC WARFARE FUNDAMENTALS NOVEMBER 2000 PREFACE Electronic Warfare Fundamentals is a student supplementary text and reference book that provides the foundation for understanding the basic concepts underlying electronic warfare (EW). This text uses a practical building-block approach to facilitate student comprehension of the essential subject matter associated with the combat applications of EW. Since radar and infrared (IR) weapons systems present the greatest threat to air operations on today's battlefield, this text emphasizes radar and IR theory and countermeasures. Although command and control (C2) systems play a vital role in modern warfare, these systems are not a direct threat to the aircrew and hence are not discussed in this book. This text does address the specific types of radar systems most likely to be associated with a modern integrated air defense system (lADS). To introduce the reader to EW, Electronic Warfare Fundamentals begins with a brief history of radar, an overview of radar capabilities, and a brief introduction to the threat systems associated with a typical lADS. The two subsequent chapters introduce the theory and characteristics of radio frequency (RF) energy as it relates to radar operations. These are followed by radar signal characteristics, radar system components, and radar target discrimination capabilities. The book continues with a discussion of antenna types and scans, target tracking, and missile guidance techniques. The next step in the building-block approach is a detailed description of countermeasures designed to defeat radar systems. The text presents the theory and employment considerations for both noise and deception jamming techniques and their impact on radar systems. -

AM Series AGILE MODULATOR
AM Series AGILE MODULATOR AM series is a family of frequency-agile analog audio/video modulators. AM-60-860, the flag-ship model, is available in NTSC C channels 2-135 (54-860 MHz), and the PAL B, G, and I channels in the same frequency range. A More economical models are available in NTSC for the frequency ranges 54-550 MHz, or 54-806 MHz. EAS (Emergency Alert System) is standard on all models. Stereo Audio, SAP (Secondary Audio Programming), and several other optional T features are also available. V Baseband Audio/Video P R O D U Modulated C Analog RF T S Ordering Information Model Stock # Description AM-60-860 59415A Frequency-agile Audio/Video Modulator, +60 dBmV, 54-860 MHz (NTSC) AM-60-806 59419 Frequency-agile Audio/Video Modulator, +60 dBmV, 54-806 MHz (NTSC) AM-60-550 59416 Frequency-agile Audio/Video Modulator, +60 dBmV, 54-550 MHz (NTSC) AM-45-550 59404 Frequency-agile Audio/Video Modulator, +45 dBmV, 54-550 MHz (NTSC) Options AM-OPT-02 BNC Video Input Connector AM-OPT-04 Sub-Band Output (Available with AM-60-550 only) AM-OPT-05 Integrated BTSC Stereo Audio AM-OPT-06 SAP Audio/ BTSC Stereo (Available with AM-60-860 only) products AM-OPT-07 Video AGC CATV AM-OPT-09 Balanced Audio Input, 600 Ohm (Standard on AM-60-860) Related Products Model Description AMCM Frequency-agile Audio/Video modulator, +45 dBmV, 54-860 MHz (NTSC & PAL), Twelve modulators in 2RU modulators freq. agile ACM Frequency-agile Audio/Video modulator, +45 dBmV, 54-806 MHz (NTSC only), Twelve modulators in 2RU MICM Fixed-channel Audio/Video modulator, +45 dBmV, 54-806 MHz (NTSC & PAL), Twelve modulators in 2RU www.blondertongue.com | 800-523-6049 76 Specifications Input Output Connector Connector: “F” Female Standard: “F” Female Impedance: 75 Ω Option 2: BNC Female Impedance: 75 Ω Return Loss: 12 dB Return Loss: 18 dB Frequency Range Video Input Level AM-60-860 Model: 54 to 860 MHz (NTSC CATV Ch. -
Radar Transmitter/Receiver
Introduction to Radar Systems Radar Transmitter/Receiver Radar_TxRxCourse MIT Lincoln Laboratory PPhu 061902 -1 Disclaimer of Endorsement and Liability • The video courseware and accompanying viewgraphs presented on this server were prepared as an account of work sponsored by an agency of the United States Government. Neither the United States Government nor any agency thereof, nor any of their employees, nor the Massachusetts Institute of Technology and its Lincoln Laboratory, nor any of their contractors, subcontractors, or their employees, makes any warranty, express or implied, or assumes any legal liability or responsibility for the accuracy, completeness, or usefulness of any information, apparatus, products, or process disclosed, or represents that its use would not infringe privately owned rights. Reference herein to any specific commercial product, process, or service by trade name, trademark, manufacturer, or otherwise does not necessarily constitute or imply its endorsement, recommendation, or favoring by the United States Government, any agency thereof, or any of their contractors or subcontractors or the Massachusetts Institute of Technology and its Lincoln Laboratory. • The views and opinions expressed herein do not necessarily state or reflect those of the United States Government or any agency thereof or any of their contractors or subcontractors Radar_TxRxCourse MIT Lincoln Laboratory PPhu 061802 -2 Outline • Introduction • Radar Transmitter • Radar Waveform Generator and Receiver • Radar Transmitter/Receiver Architecture -

Radio Frequency Interference Analysis of Spectra from the Big Blade Antenna at the LWDA Site
Radio Frequency Interference Analysis of Spectra from the Big Blade Antenna at the LWDA Site Robert Duffin (GMU/NRL) and Paul S. Ray (NRL) March 23, 2007 Introduction The LWA analog receiver will be required to amplify and digitize RF signals over the full bandwidth of at least 20–80 MHz. This frequency range is populated with a number of strong sources of radio frequency interference (RFI), including several TV stations, HF broadcast transmissions, ham radio, and is adjacent to the FM band. Although filtering can be used to attenuate signals outside the band, the receiver must be designed with sufficient linearity and dynamic range to observe cosmic sources in the unoccupied regions between the, typically narrowband, RFI signals. A receiver of insufficient linearity will generate inter-modulation products at frequencies in the observing bands that will make it difficult or impossible to accomplish the science objectives. On the other hand, over-designing the receiver is undesirable because any excess cost or power usage will be multiplied by the 26,000 channels in the full design and may make the project unfeasible. Since the sky background is low level and broadband, the linearity requirements primarily depend on the RFI signals presented to the receiver. Consequently, a detailed study of the RFI environment at candidate LWA sites is essential. Often RFI surveys are done using antennas optimized for RFI detection such as discone antennas. However, such data are of limited usefulness for setting the receiver requirements because what is relevant is what signals are passed to the receiver when it is connected to the actual LWA antenna. -

VCO) for Frequency Shifting Or Synthesis in RF Front-End Circuitry
A Low Power, Low Noise, 1.8GHz Voltage-Controlled Oscillator by Donald A. Hitko Bachelor of Science in Electrical Engineering GMI Engineering & Management Institute, 1994 Submitted to the Department of Electrical Engineering and Computer Science in partial fulfillment of the requirements for the degree of Master of Science in Electrical Engineering and Computer Science at the MASSACHUSETTS INSTITUTE OF TECHNOLOGY February 1997 © 1997 Massachusetts Institute of Technology All rights reserved. A u th o r ......... ......................................................................................... Department of Electrical Engineering and Computer Science September 27, 1996 C ertified by ........... ............ ...................................................... Charles G. Sodini Professor of Electrical Engineering and Computer Science fl q Thesis Supervisor Accepted by ..................-----. - ............. Acceptedby F. R. Morgenthaler Chai n, Department \'minittee on Graduate Students • ~MAR 0 6 1997 UF•BARIES A Low Power, Low Noise, 1.8 GHz Voltage-Controlled Oscillator by Donald A. Hitko Submitted to the Department of Electrical Engineering and Computer Science on September 27, 1996, in partial fulfillment of the requirements for the degree of Master of Science in Electrical Engineering. Abstract Transceivers which form the core of many wireless communications products often require a low noise voltage-controlled oscillator (VCO) for frequency shifting or synthesis in RF front-end circuitry. Since many wireless applications are focused on portability, low power operation is a necessity. Techniques for implementing oscillators are explored and then evaluated for the purposes of simultaneously realizing low noise and low power operation. Models for the design of oscillators and the analysis of oscillation stability are covered, and methods of calculating phase noise are discussed. These models and theories all point to the need for a high quality, passive, integrated inductor to meet the system goals. -

Radio Communications in the Digital Age
Radio Communications In the Digital Age Volume 1 HF TECHNOLOGY Edition 2 First Edition: September 1996 Second Edition: October 2005 © Harris Corporation 2005 All rights reserved Library of Congress Catalog Card Number: 96-94476 Harris Corporation, RF Communications Division Radio Communications in the Digital Age Volume One: HF Technology, Edition 2 Printed in USA © 10/05 R.O. 10K B1006A All Harris RF Communications products and systems included herein are registered trademarks of the Harris Corporation. TABLE OF CONTENTS INTRODUCTION...............................................................................1 CHAPTER 1 PRINCIPLES OF RADIO COMMUNICATIONS .....................................6 CHAPTER 2 THE IONOSPHERE AND HF RADIO PROPAGATION..........................16 CHAPTER 3 ELEMENTS IN AN HF RADIO ..........................................................24 CHAPTER 4 NOISE AND INTERFERENCE............................................................36 CHAPTER 5 HF MODEMS .................................................................................40 CHAPTER 6 AUTOMATIC LINK ESTABLISHMENT (ALE) TECHNOLOGY...............48 CHAPTER 7 DIGITAL VOICE ..............................................................................55 CHAPTER 8 DATA SYSTEMS .............................................................................59 CHAPTER 9 SECURING COMMUNICATIONS.....................................................71 CHAPTER 10 FUTURE DIRECTIONS .....................................................................77 APPENDIX A STANDARDS -
Dec. 18, 1956 . F. J. BURGER 2,774,866 Firancis. J. B/RGER
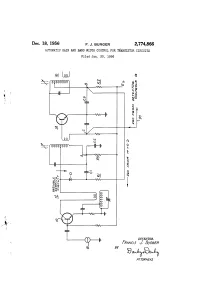
Dec. 18, 1956 . F. J. BURGER 2,774,866 AUTOMATIC GAIN AND BAND WIDTH CONTROL FORTRANSISTOR CIRCUITS Filed Jan. 30, 1956 s log 00 0 0-0 000 & S. l INVENTOR, firANCIS. J. B/RGER 9. BY alid. A77ORNEYs 2,774,866 United States Patent Office Patented Dec. 18, 1956 2 reduced gain conditions. In order to prevent such dis tortion some means is required to reduce the signal level 2,774,866 prior to its application to the first intermediate frequency stage. In addition to the distortion problem, as is known, AUTOMATIC GAN AND BAND WIDTH CONTROL 5 the band width of the intermediate frequency amplifier FORTRANSISTOR CIRCUITS varies as a function of the magnitude of the automatic Francis J. Burger, Leonia, N. J., assignior to Enuerson gain controi voltage. As the gain of the transistor is Radio & Phonograph Corporation, Jersey City, N. , reduced, the loading which it presents to the intermediate a corporation of New York frequency coils decreases, thus increasing the Q of the O circuit and narrowing the band width. There also results Application January 30, 1956, Serial No. 562,072 a change in reactive loading provided by the I. F. tran 6 Claims. (C. 250-20) sistor which causes the intermediate frequency coils to shift their frequency center to a higher value. The purpose of this invention is to provide a variable This invention relates to improvements in transistor damping system which will vary the primary damping circuits, particularly transistor radio receivers with re of the converter intermediate frequency coil as a func spect to means for providing automatic gain and band tion of the automatic gain control voltage. -

Primer > PCR Measurements
PCR Measurements PCR Measurements 1,E-01 1,E-02 1,E-03 1,E-04 1,E-05 1,E-06 1,E-07 1,E-08 1,E-09 10-5 10-4 10-3 0,01 0,1 1 10 100 Drift limiting region Jitter limiting region PCR Measurements Primer New measurements in ETR 2901 Synchronizing the Components of a Video Signal Abstract Delivering TV pictures from studio to home entails sending various types of One of the problems for any type of synchronization procedure is the jitter data: brightness, sound, information about the picture geometry, color, etc. on the incoming signal that is the source for the synchronization process. and the synchronization data. Television signals are subject to this general problem, and since the In analog TV systems, there is a complex mixture of horizontal, vertical, analog and digital forms of the TV signal differ, the problems due to jitter interlace and color subcarrier reference synchronization signals. All this manifest themselves in different ways. synchronization information is mixed together with the corresponding With the arrival of MPEG compression and the possibility of having several blanking information, the active picture content, tele-text information, test different TV programs sharing the same Transport Stream (TS), a mechanism signals, etc. to produce the programs seen on a TV set. was developed to synchronize receivers to the selected program. This The digital format used in studios, generally based on the standard ITU-R procedure consists of sending numerical samples of the original clock BT.601 and ITU-R BT.656, does not need a color subcarrier reference frequency. -

Amplifier Frequency Response
EE105 – Fall 2015 Microelectronic Devices and Circuits Prof. Ming C. Wu [email protected] 511 Sutardja Dai Hall (SDH) 2-1 Amplifier Gain vO Voltage Gain: Av = vI iO Current Gain: Ai = iI load power vOiO Power Gain: Ap = = input power vIiI Note: Ap = Av Ai Note: Av and Ai can be positive, negative, or even complex numbers. Nagative gain means the output is 180° out of phase with input. However, power gain should always be a positive number. Gain is usually expressed in Decibel (dB): 2 Av (dB) =10log Av = 20log Av 2 Ai (dB) =10log Ai = 20log Ai Ap (dB) =10log Ap 2-2 1 Amplifier Power Supply and Dissipation • Circuit needs dc power supplies (e.g., battery) to function. • Typical power supplies are designated VCC (more positive voltage supply) and -VEE (more negative supply). • Total dc power dissipation of the amplifier Pdc = VCC ICC +VEE IEE • Power balance equation Pdc + PI = PL + Pdissipated PI : power drawn from signal source PL : power delivered to the load (useful power) Pdissipated : power dissipated in the amplifier circuit (not counting load) P • Amplifier power efficiency η = L Pdc Power efficiency is important for "power amplifiers" such as output amplifiers for speakers or wireless transmitters. 2-3 Amplifier Saturation • Amplifier transfer characteristics is linear only over a limited range of input and output voltages • Beyond linear range, the output voltage (or current) waveforms saturates, resulting in distortions – Lose fidelity in stereo – Cause interference in wireless system 2-4 2 Symbol Convention iC (t) = IC +ic (t) iC (t) : total instantaneous current IC : dc current ic (t) : small signal current Usually ic (t) = Ic sinωt Please note case of the symbol: lowercase-uppercase: total current lowercase-lowercase: small signal ac component uppercase-uppercase: dc component uppercase-lowercase: amplitude of ac component Similarly for voltage expressions.