A Generalized Approach to Planar Induction Heating Magnetics by Richard Yi Zhang B.E
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

User Manual Heritage® Induction Cooktop HICT305BG, HICT365BG
User Manual Heritage® Induction Cooktop HICT305BG, HICT365BG Table of Contents Important Safety Instructions ............................................... 1 Consignes de sécurité importantes .........................4 Before Using the Cooktop ......................................................7 Using the Cooktop .................................................................10 Care and Cleaning .................................................................15 Troubleshooting ....................................................................16 Warranty ................................................................................. 17 Warranty Card ........................................................ Back Cover Part No. 113776 Rev. A To Our Valued Customer: Congratulations on your purchase of the very latest in Dacor® products! Our unique combination of features, style, and performance make us a great addition to your home. To familiarize yourself with the controls, functions, and full potential of your new Dacor induction cooktop, read this manual thoroughly, starting at the Important Safety Instructions section (Pg. 1). Dacor appliances are designed and manufactured with quality and pride, while working within the framework of our company values. Should you ever have an issue with your cooktop, first consult the Troubleshooting section (Pg. 14), which gives suggestions and remedies that may pre-empt a call for service. Valuable customer input helps us continually improve our products and services, so feel free to contact -

Modeling, Simulation and Verification of Contactless Power Transfer
Modeling, Simulation and Verification of Contactless Power Transfer Systems J. Serrano(1,*), M. Perez-Tarragona´ (1), C. Carretero(2), J. Acero(1). (1)Department of Electronic Engineering and Communications. Universidad de Zaragoza. Maria de Luna, 1. 50018 Zaragoza. Spain. (2)Department of Applied Physics. Universidad de Zaragoza. Pedro Cerbuna, 12. 50009 Zaragoza, Spain. (*)E-mail: [email protected] Abstract—This work presents the analysis of a wireless power transfer system consisting of two coupled coils and ferrite slabs acting as flux con- centrators. The study makes use of Finite Element Method (FEM) simulations to predict the key per- formance indicators of the system such as coupling, quality factor and winding resistance. The simula- tions results were compared against experimental measurements on a prototype showing consistence. Keywords—Wireless power transfer, Electro- magnetic modeling, FEM simulation, Inductive Charging. Fig. 1. Wireless power transfer system. I. INTRODUCTION Wireless power transfer (WPT) applications will be later compared against measurements on are taking major importance among market trends a prototype. thanks to their versatility and user convenience. This solution allows the producers to remove In order to address this problem, in Section the cables and connectors which are one of the II, key performance indicators will be defined. main causes of breakdown. As this technology In Section III, the electromagnetic model will be consolidates, WPT systems are becoming more presented. In Section IV, the simulation procedure common and available for a large number of with COMSOL will be detailed. In Section V, devices. The modeling of these systems is, the model will be experimentally validated by therefore, of great interest. -

FSM Induction Cooking Feature April 2014
FSM Magazine – April 2014 Feature: Induction Cooking Please attribute any quotes on this information to Ray Hall, Managing Director, RH Hall Ltd How do induction cookers work compared to conventional equipment? Induction works by the process of passing a high frequency alternating current through an electrically conducting object (usually metal) to create a magnetic field of energy. This energy then induces an electric current in the metal object it comes into contact with it – i.e. in the case of cooking – it creates a flowing current in a metal pan which then produces resistive heating, which heats the food. In an induction cooker, a ferromagnetic coil is placed underneath a ceramic hob that transfers heat directly to the metal pan on top. Whilst the current is large, it is produced by a low voltage. The induction process works by ‘direct’ heating of a metal cooking vessel, as opposed to using ‘heat transfer’ which you have when burning gas on a traditional cooking stove. For nearly all models of induction cooktop, the cooking vessel must be made of a ferromagnetic metal or placed on an interface disk which enables non-induction cookware to be used on induction cooking surfaces. How widespread is their use becoming? Induction cooking equipment may still be more expensive than traditional methods at the moment, but it is becoming cheaper and more cost effective, especially since the interest and acceptance of it is widening and with more ranges becoming available in the market – most manufacturers now offer some form of induction cooking equipment – from the entry level – like our Maestrowave Induction Hob which runs off a 13 amp plug, to full induction ranges, which are an alternative to a traditional gas 6 burner range for example. -

Design of a Battery-Powered Induction Stove by Daniel J Weber S.B., Massachusetts Institute of Technology, 2014
Design of a Battery-Powered Induction Stove by Daniel J Weber S.B., Massachusetts Institute of Technology, 2014 Submitted to the Department of Electrical Engineering and Computer Science in Partial Fulfillment of the Requirements for the Degree of Master of Engineering in Electrical Engineering and Computer Science at the Massachusetts Institute of Technology June 2015 Copyright 2015 Massachusetts Institute of Technology. All rights reserved. Author: Department of Electrical Engineering and Computer Science May 22, 2015 Certified By: Rich Fletcher, Thesis Supervisor May 22, 2015 Accepted By: Prof. Albert R. Meyer, Chairman, Masters of Engineering Thesis Committee 1 2 Design of a Battery-Powered Induction Stove by Daniel J Weber Submitted to the Department of Electrical Engineering and Computer Science on May 25, 2015, in partial fulfillment of the requirements for the degree of Master of Engineering in Electrical Engineering and Computer Science Abstract Many people in the developing areas of the world struggle to cook with stoves that emit hazardous fumes and contribute to green house gas emissions. Electric stoves would alleviate many of these issues, but significant barriers to adoption, most notably lack of reliable electric power, make current commercial options infeasible. However, a stove with an input power of 24V DC elegantly solves the issue of intermittent power by allowing car batteries to be used instead of a grid connection, while also allowing seamless integration with small scale solar installations and solar-based micro-grids. However, no existing commercial stoves nor academic research have attempted to create an induction stove powered from a low voltage DC source. This paper presents the design of a low voltage current-fed, full-bridge parallel resonant converter stove. -
Induction Cooking Heater and Method for the Control Thereof
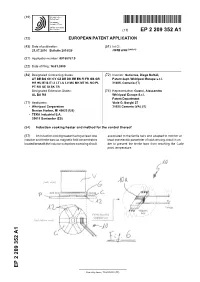
(19) & (11) EP 2 209 352 A1 (12) EUROPEAN PATENT APPLICATION (43) Date of publication: (51) Int Cl.: 21.07.2010 Bulletin 2010/29 H05B 6/06 (2006.01) (21) Application number: 09150707.9 (22) Date of filing: 16.01.2009 (84) Designated Contracting States: (72) Inventor: Gutierrez, Diego Neftali, AT BE BG CH CY CZ DE DK EE ES FI FR GB GR Patent dept. Whirlpool Europe s.r.l. HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL 21025, Comerio (IT) PT RO SE SI SK TR Designated Extension States: (74) Representative: Guerci, Alessandro AL BA RS Whirlpool Europe S.r.l. Patent Department (71) Applicants: Viale G. Borghi 27 • Whirlpool Corporation 21025 Comerio (VA) (IT) Benton Harbor, MI 49022 (US) • TEKA Industrial S.A. 39011 Santander (ES) (54) Induction cooking heater and method for the control thereof (57) An induction cooking heater having at least one associated to the ferrite bars and adapted to monitor at inductor and ferrite bars as magnetic field concentrators least one electric parameter of said sensing circuit in or- located beneath the inductor comprises a sensing circuit der to prevent the ferrite bars from reaching the Curie point temperature. EP 2 209 352 A1 Printed by Jouve, 75001 PARIS (FR) EP 2 209 352 A1 Description [0001] The present invention relates to an induction cooking heater of the type comprising at least one inductor and magnetic field concentration means located beneath the inductor. 5 [0002] These known induction cooking heaters use half-bridge converters for supplying the load composed of the system induction coil + cooking vessel in series with two parallel resonant capacitors. -

Induction Cooking – Igbts in Resonant Converters
AN4713 Application note Induction cooking: IGBTs in resonant converters Luigi Abbatelli, Giuseppe Catalisano, Rosario Gulino, Maurizio Melito Introduction In this paper, we specifically examine the role of STMicroelectronics IGBTs in resonant converters for induction cooking applications. We aim to help designers select the appropriate IGBTs for their circuits by explaining the dependence of IGBT power loss on key parameters, circuit topology and application requirements. Resonant and quasi-resonant switching techniques have been widely used in high-frequency power conversion systems in order to reduce overall size, weight and power loss [1]. To minimize switching losses, resonant and quasi-resonant converters force switching transitions to occur when there is either zero current through or zero voltage across the power switch. However, the necessary current or voltage rating of the IGBT is much higher than that required for conventional hard-switching systems, so the devices are more expensive. For medium and high power systems, IGBTs with higher current density and low saturation voltages must be selected to minimize the conduction loss. An induction cooking application is included to evaluate STMicroelectronics IGBT components or to get started quickly with your own induction cooking development project. Induction cooking is not a new invention, it is used all around the world with first patents dating to the early 1900s[2]. With recent improvements in technology and the consequent reduction of component costs, induction cooking equipment is becoming increasingly more affordable. June 2015 DocID027936 Rev 1 1/20 www.st.com Contents AN4713 Contents 1 Induction cooking basics................................................................ 4 2 Converter topology and power switch requirements .................. -

High Frequency Inverter Power Stage Design Considerations for Non-Magnetic Materials Induction Cooking
High Frequency Inverter Power Stage Design Considerations for Non-Magnetic Materials Induction Cooking Zidong Liu Thesis submitted to the Faculty of the Virginia Polytechnic Institute and State University in partial fulfillment of the requirements for the degree of Master of Science In Electrical Engineering Jason Lai, Chairman Kathleen Meehan Wensong Yu January 14, 2011 Blacksburg, Virginia Key words: Electromagnetic, Induction Cooking, Series-Resonant, Soft Switching Copyright 2010, Zidong Liu High Frequency Inverter Power Stage Design Considerations for Non-Magnetic Materials Induction Cooking Zidong Liu ABSTRACT Recently induction cookers, which are based on induction heating principle, have become quite popular due to their advantages such as high energy efficiency, safety, cleanliness, and compact size. However, it is widely known that with current technology, induction cookers require the cookware to be made of magnetic materials such as iron and stainless steel. This is why a lot of cookware is labeled ―Induction Ready‖ on the bottom. The limited choice of ―Induction Ready‖ cookware causes inconvenience to customers and limits the growing popularity of the induction cooker. Therefore, a novel induction cooker, which can work for non-magnetic material cookware such as aluminum and copper, can be very competitive in the market. This thesis studies the induction cooking application; briefly introduces its fundamental principle, research background and the motivation of the development of a non-magnetic material induction cooker. Followed by the research motivation, three commonly used inverter topologies, series resonant inverter, parallel resonant inverter, and single-ended resonant inverter, are introduced. A comparative study is made among these three topologies, and the comparative study leads to a conclusion that the series resonant inverter is more suitable for non-magnetic material induction cooking application. -

Induction Cooking Application Based on Class E Resonant Inverter: Simulation Using MATLAB
International Journal of Science and Research (IJSR) ISSN (Online): 2319-7064 Index Copernicus Value (2013): 6.14 | Impact Factor (2013): 4.438 Induction Cooking Application Based on Class E Resonant Inverter: Simulation using MATLAB Hemlata N. Mungikar1, V. S. Jape2 1Electrical Department, PES’s Modern College of Engineering,. Pune, India 2Professor, Electrical Department, PES’s Modern College of Engineering,. Pune, India Abstract: This paper presents simulation of induction cooker circuit using class E resonant inverter in MATLAB. Induction heating is well known technique for producing very high temperature in fraction of time. Induction cooking is an application of induction heating which is used for residential and commercial usage. With the help of class E resonant inverter, high power factor and low line current can be obtained, which are very attractive in terms of commercial production. The induction cooker's parameters using class E resonant inverter are designed properly and details of design are described. Switching technique using pulse density modulation (PDM) is presented for the inverter to control the temperature. Along with the description of system model simulation results are obtained and verified with the system model. Keywords: Class E resonant inverter, Induction cooker, MATLAB Simulink, Pulse density modulation (PDM) 1. Introduction coil, a resonance capacitor is placed in parallel to the coil. Semiconductor switches operate in hard switch mode with a There are three main methods of cooking chemical, electrical very high frequency that’s why pulse density modulation and induction heating. In chemical heating it burns some (PDM) technology is used in system. combustible substance such as wood, coal, gas. -
The Guide Cookware Bakeware
THE GUIDE TO COOKWARE AND BAKEWARE HOW TO USE THIS GUIDE This guide is organized primarily for retail buyers and knowledgeable consumers as an easy- reference handbook and includes as much information as possible. The information carries readers from primitive cooking through to today’s use of the most progressive technology in manufacturing. Year after year, buyers and knowledgeable consumers find this guide to be an invaluable tool in selection useful desirable productions for those who ultimately will use it in their own kitchens. Consumers will find this guide helpful in learning about materials and methods used in the making of cookware. Such knowledge leads to the selection of quality equipment that can last a lifetime with sound care and maintenance, information that is also found within this guide. Any reader even glancing through the text and illustrations will gain a better appreciation of one of the oldest and most durable products mankind has every devised. SECTIONS • Cooking Past and Present ........................................ 3 • Cooking Methods ................................................ 5 • Materials and Construction ....................................... 8 • Finishes, Coatings & Decorations ................................. 15 • Handles, Covers & Lids ........................................... 22 • Care & Maintenance ............................................. 26 • Selection Products ............................................... 30 • CMA Standards .................................................. 31 • -

Rigorous Electromagnetic Analysis of Domestic Induction Heating Appliances
PIERS ONLINE, VOL. 5, NO. 5, 2009 491 Rigorous Electromagnetic Analysis of Domestic Induction Heating Appliances G. Cerri, S. A. Kovyryalov, V. Mariani Primiani, and P. Russo Universit`aPolitecnica Delle Marche | DIBET, Via Brecce Bianche, Ancona 60100, Italy Abstract| In this paper the developed analytical electromagnetic model of induction heating system is presented. The model was built up assuming equivalent electric and magnetic currents flowing in each planar element of the typical structure used for an induction heating system: the load disk represents the pan steel bottom, the copper inductor, and ferrite flux conveyor. A system of integral equations system was then obtained enforcing the boundary conditions on each element of the structure for the electric and magnetic ¯elds, produced by the equivalent currents. The numerical solution of the system is a matrix equation with a known voltage vector in the left-hand side, and product of impedance coe±cients matrix and unknown electric and magnetic currents vector in the right-hand side. Since the feeding voltage is known, and impedance coe±cients are calculated using of geometry and material parameters, currents vector can be also calculated. Thus, the whole model is solved and it gives a detailed picture of currents distribution in the system, which in its turn allows to analyze heating process in the load. Each step of developing of the model was veri¯ed by appropriate experimental measurements. Achieved results give a possibility to analyze and develop improvements to increase e±ciency, safety and to reduce the cost. 1. INTRODUCTION Domestic induction cookers become more and more popular because of their high e±ciency, safety and ease in use. -

Induction Cooking Factsheet
Induction Cooking Factsheet Use an induction stove to cook faster and safer with better control and easier cleanup, while fighting climate change and providing better indoor air quality. Find out why many chefs have made the switch, including Julia Child, Wolfgang Puck of Spago, and Thomas Keller of The French Laundry. Gas stoves are unhealthy for Induction stoves your family and the planet are a great answer - - Bad for your lungs: Gas stoves emit ++ Healthier: Induction stoves do not emit toxic gases into your house that can cause any toxic gases into your house. asthma and other respiratory problems, including nitrogen dioxide, carbon monoxide, ++ Climate friendly: Induction stoves use and formaldehyde. electricity. California’s electricity is getting cleaner every year with more wind & solar. Most - - Bad for our climate Gas stoves emit Bay Area residents can already choose 100% carbon dioxide into the atmosphere which renewable electricity through their local contributes to global warming. community choice energy provider. Advantages of induction cooking Faster: An induction stove can send more Safer: Only the pan gets hot - the cooktop is energy rapidly into a pan than a gas or only warm under the pan. with no flame and little traditional coil or radiant electric stove, boiling residual heat after you remove the pan, water far faster. induction cooking reduces accidental burns. There will never be a gas leak since there is no Immediate response: With all energy going pilot to blow out, no igniter to fail and no gas line to break in an earthquake. Finally, there is no directly into the pan, and no grate, coil or radiant open flame to start a grease fire or ignite a burner to heat up, the temperature can be raised potholder or towel. -

Induction Cooking Fact Sheet WCAG
INDUCTION COOKING Your guide to energy-efficient stoves and cooktops. With advancements in induction cooking technology, induction stoves are now able to cook faster and safer than ever before. Offering more control and easier cleanup, induction cooktops make a great addition to residential and commercial kitchens alike, while also fighting climate change and providing better indoor air quality. IMPROVED INDUCTION TECHNOLOGY COMES WITH NEW FEATURES AND ADVANTAGES. • Safer | Overall kitchen safety is improved for both adults and children, as well as professional chefs. Without an open flame, accidental injuries or kitchen/grease fires are greatly reduced. Induction cooktops are also safe from gas-related dangers, • Wide temperature range | In comparison to gas such as leaks or line breaks. stoves, induction cooktops provide and accurately • Faster | An induction stove can transfer more maintain both high boiling temperatures and lower energy into cookware faster than a gas, traditional simmer temperatures. coil, or radiant electric stove. This means reaching • Even cooking | An induction stove heats up the desired cooking temperatures or boiling water faster. entire pan simultaneously and more evenly than a • Easy to clean | Induction stoves have a smooth, gas flame or electric radiant coil, which only heat easy-to-clean ceramic glass surface without grates, the part of the cookware they touch. nooks, or crannies where grease and spills accumulate. • Efficient | Just the cookware is heated. No energy • Immediate response | Cooking temperatures can is wasted heating the air around the pan. be raised or lowered instantly. With no grate, coil, or • Cooler kitchen | Without an open flame, plus radiant burner to heat, all energy goes directly into the direct application of energy into the cookware the cookware.