Appendix a the Symmetry Representation Theorem
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

ON the GALILEAN COVARIANCE of CLASSICAL MECHANICS Abstract
Report INP No 1556/PH ON THE GALILEAN COVARIANCE OF CLASSICAL MECHANICS Andrzej Horzela, Edward Kapuścik and Jarosław Kempczyński Department of Theoretical Physics, H. Niewodniczański Institute of Nuclear Physics, ul. Radzikowskiego 152, 31 342 Krakow. Poland and Laboratorj- of Theoretical Physics, Joint Institute for Nuclear Research, 101 000 Moscow, USSR, Head Post Office. P.O. Box 79 Abstract: A Galilean covariant approach to classical mechanics of a single interact¬ ing particle is described. In this scheme constitutive relations defining forces are rejected and acting forces are determined by some fundamental differential equa¬ tions. It is shown that the total energy of the interacting particle transforms under Galilean transformations differently from the kinetic energy. The statement is il¬ lustrated on the exactly solvable examples of the harmonic oscillator and the case of constant forces and also, in the suitable version of the perturbation theory, for the anharmonic oscillator. Kraków, August 1991 I. Introduction According to the principle of relativity the laws of physics do' not depend on the choice of the reference frame in which these laws are formulated. The change of the reference frame induces only a change in the language used for the formulation of the laws. In particular, changing the reference frame we change the space-time coordinates of events and functions describing physical quantities but all these changes have to follow strictly defined ways. When that is achieved we talk about a covariant formulation of a given theory and only in such formulation we may satisfy the requirements of the principle of relativity. The non-covariant formulations of physical theories are deprived from objectivity and it is difficult to judge about their real physical meaning. -

Yesterday, Today, and Forever Hebrews 13:8 a Sermon Preached in Duke University Chapel on August 29, 2010 by the Revd Dr Sam Wells
Yesterday, Today, and Forever Hebrews 13:8 A Sermon preached in Duke University Chapel on August 29, 2010 by the Revd Dr Sam Wells Who are you? This is a question we only get to ask one another in the movies. The convention is for the question to be addressed by a woman to a handsome man just as she’s beginning to realize he isn’t the uncomplicated body-and-soulmate he first seemed to be. Here’s one typical scenario: the war is starting to go badly; the chief of the special unit takes a key officer aside, and sends him on a dangerous mission to infiltrate the enemy forces. This being Hollywood, the officer falls in love with a beautiful woman while in enemy territory. In a moment of passion and mystery, it dawns on her that he’s not like the local men. So her bewitched but mistrusting eyes stare into his, and she says, “Who are you?” Then there’s the science fiction version. In this case the man develops an annoying habit of suddenly, without warning, traveling in time, or turning into a caped superhero. Meanwhile the woman, though drawn to his awesome good looks and sympathetic to his commendable desire to save the universe, yet finds herself taking his unexpected and unusual absences rather personally. So on one of the few occasions she gets to look into his eyes when they’re not undergoing some kind of chemical transformation, she says, with the now-familiar, bewitched-but-mistrusting expression, “Who are you?” “Who are you?” We never ask one another this question for fear of sounding melodramatic, like we’re in a movie. -
The New Adaption Gallery
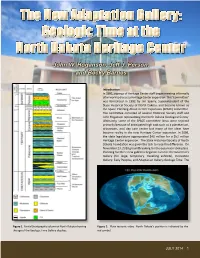
Introduction In 1991, a group of Heritage Center staff began meeting informally after work to discuss a Heritage Center expansion. This “committee” was formalized in 1992 by Jim Sperry, Superintendent of the State Historical Society of North Dakota, and became known as the Space Planning About Center Expansion (SPACE) committee. The committee consisted of several Historical Society staff and John Hoganson representing the North Dakota Geological Survey. Ultimately, some of the SPACE committee ideas were rejected primarily because of anticipated high cost such as a planetarium, arboretum, and day care center but many of the ideas have become reality in the new Heritage Center expansion. In 2009, the state legislature appropriated $40 million for a $52 million Heritage Center expansion. The State Historical Society of North Dakota Foundation was given the task to raise the difference. On November 23, 2010 groundbreaking for the expansion took place. Planning for three new galleries began in earnest: the Governor’s Gallery (for large, temporary, travelling exhibits), Innovation Gallery: Early Peoples, and Adaptation Gallery: Geologic Time. The Figure 1. Partial Stratigraphic column of North Dakota showing Figure 2. Plate tectonic video. North Dakota's position is indicated by the the age of the Geologic Time Gallery displays. red symbol. JULY 2014 1 Orientation Featured in the Orientation area is an interactive touch table that provides a timeline of geological and evolutionary events in North Dakota from 600 million years ago to the present. Visitors activate the timeline by scrolling to learn how the geology, environment, climate, and life have changed in North Dakota through time. -

Special Relativity
Special Relativity April 19, 2014 1 Galilean transformations 1.1 The invariance of Newton’s second law Newtonian second law, F = ma i is a 3-vector equation and is therefore valid if we make any rotation of our frame of reference. Thus, if O j is a rotation matrix and we rotate the force and the acceleration vectors, ~i i j F = O jO i i j a~ = O ja then we have F~ = ma~ and Newton’s second law is invariant under rotations. There are other invariances. Any change of the coordinates x ! x~ that leaves the acceleration unchanged is also an invariance of Newton’s law. Equating and integrating twice, a~ = a d2x~ d2x = dt2 dt2 gives x~ = x + x0 − v0t The addition of a constant, x0, is called a translation and the change of velocity of the frame of reference is called a boost. Finally, integrating the equivalence dt~= dt shows that we may reset the zero of time (a time translation), t~= t + t0 The complete set of transformations is 0 P xi = j Oijxj Rotations x0 = x + a T ranslations 0 t = t + t0 Origin of time x0 = x + vt Boosts (change of velocity) There are three independent parameters describing rotations (for example, specify a direction in space by giving two angles (θ; ') then specify a third angle, , of rotation around that direction). Translations can be in the x; y or z directions, giving three more parameters. Three components for the velocity vector and one more to specify the origin of time gives a total of 10 parameters. -

Axiomatic Newtonian Mechanics
February 9, 2017 Cornell University, Department of Physics PHYS 4444, Particle physics, HW # 1, due: 2/2/2017, 11:40 AM Question 1: Axiomatic Newtonian mechanics In this question you are asked to develop Newtonian mechanics from simple axioms. We first define the system, and assume that we have point like particles that \live" in 3d space and 1d time. The very first axiom is the principle of minimal action that stated that the system follow the trajectory that minimize S and that Z S = L(x; x;_ t)dt (1) Note that we assume here that L is only a function of x and v and not of higher derivative. This assumption is not justified from first principle, but at this stage we just assume it. We now like to find L. We like L to be the most general one that is invariant under some symmetries. These symmetries would be the axioms. For Newtonian mechanics the axiom is that the that system is invariant under: a) Time translation. b) Space translation. c) Rotation. d) Galilean transformations (I.e. shifting your reference frame by a constant velocity in non-relativistic mechanics.). Note that when we say \the system is invariant" we mean that the EOMs are unchanged under the transformation. This is the case if the new Lagrangian, L0 is the same as the old one, L up to a function that is a total time derivative, L0 = L + df(x; t)=dt. 1. Formally define these four transformations. I will start you off: time translation is: the equations of motion are invariant under t ! t + C for any C, which is equivalent to the statement L(x; v; t + C) = L(x; v; t) + df=dt for some f. -

Newton's Laws
Newton’s Laws First Law A body moves with constant velocity unless a net force acts on the body. Second Law The rate of change of momentum of a body is equal to the net force applied to the body. Third Law If object A exerts a force on object B, then object B exerts a force on object A. These have equal magnitude but opposite direction. Newton’s second law The second law should be familiar: F = ma where m is the inertial mass (a scalar) and a is the acceleration (a vector). Note that a is the rate of change of velocity, which is in turn the rate of change of displacement. So d d2 a = v = r dt dt2 which, in simplied notation is a = v_ = r¨ The principle of relativity The principle of relativity The laws of nature are identical in all inertial frames of reference An inertial frame of reference is one in which a freely moving body proceeds with uniform velocity. The Galilean transformation - In Newtonian mechanics, the concepts of space and time are completely separable. - Time is considered an absolute quantity which is independent of the frame of reference: t0 = t. - The laws of mechanics are invariant under a transformation of the coordinate system. u y y 0 S S 0 x x0 Consider two inertial reference frames S and S0. The frame S0 moves at a velocity u relative to the frame S along the x axis. The trans- formation of the coordinates of a point is, therefore x0 = x − ut y 0 = y z0 = z The above equations constitute a Galilean transformation u y y 0 S S 0 x x0 These equations are linear (as we would hope), so we can write the same equations for changes in each of the coordinates: ∆x0 = ∆x − u∆t ∆y 0 = ∆y ∆z0 = ∆z u y y 0 S S 0 x x0 For moving particles, we need to know how to transform velocity, v, and acceleration, a, between frames. -

Hebrews 13:8 Jesus Christ the Eternal Unchanging Son Of
Hebrews 13:8 The Unchanging Christ is the Same Forever Jesus Christ the Messiah is eternally trustworthy. The writer of Hebrews simply said, "Jesus Christ is the same yesterday, today and forever" (Hebrews 13:8). In a turbulent and fast-changing world that goes from one crisis to the next nothing seems permanent. However, this statement of faith has been a source of strength and encouragement for Christians in every generation for centuries. In a world that is flying apart politically, economically, personally and spiritually Jesus Christ is our only secure anchor. Through all the changes in society, the church around us, and in our spiritual life within us, Jesus Christ changes not. He is ever the same. As our personal faith seizes hold of Him we will participate in His unchangeableness. Like Christ it will know no change, and will always be the same. He is just as faithful now as He has ever been. Jesus Christ is the same for all eternity. He is changeless, immutable! He has not changed, and He will never change. The same one who was the source and object of triumphant faith yesterday is also the one who is all-sufficient and all-powerful today to save, sustain and guide us into the eternal future. He will continue to be our Savior forever. He steadily says to us, "I will never fail you nor forsake you." In His awesome prayer the night before His death by crucifixion, Jesus prayed, "Now, Father, glorify Me together with Yourself, with the glory which I had with You before the world was" (John 17:5). -
Yesterday and Today
Yesterday and Today IN PARTNERSHIP WITH Yesterday_and_Today_FC.indd 1 3/2/17 2:01 PM 2 Schools Past At school, you learn to read and write and do math, just like children long ago. These things are the same. Then This is what a school looked like in the past. The past means long ago, the time before now. Back then, schools had only one room. Children of all ages learned together. Abacus Hornbook There were no buses Children used Children learned to or cars. Everyone chalk to write read from a hornbook. walked to school. on small boards They used an abacus called slates. for math. yesterday and today_2-3.indd 6 3/2/17 2:04 PM 3 and Present Some things about school How are schools have changed. To change today different from is to become different. schools long ago? Now This photograph shows a school in the present. The present means now. Today, most schools have many rooms. Most children in a class are about the same age. Children may take a bus to school, or get a ride in a car. Special-needs school Home school Children have notebooks, books, There are different and computers. These are tools kinds of schools. for learning. A tool is something people use to do work. yesterday and today_2-3.indd 7 3/2/17 2:05 PM 4 Communities Past A community is a place where people live. In some ways, communities haven’t changed. They have places to live, places to work, and places to buy things. -

The Standard Model of Particle Physics - I
The Standard Model of Particle Physics - I Lecture 3 • Quantum Numbers and Spin • Symmetries and Conservation Principles • Weak Interactions • Accelerators and Facilities Eram Rizvi Royal Institution - London 21st February 2012 Outline The Standard Model of Particle Physics - I - quantum numbers - spin statistics A Century of Particle Scattering 1911 - 2011 - scales and units - symmetries and conservation principles - the weak interaction - overview of periodic table → atomic theory - particle accelerators - Rutherford scattering → birth of particle physics - quantum mechanics - a quick overview The Standard Model of Particle Physics - II - particle physics and the Big Bang - perturbation theory & gauge theory - QCD and QED successes of the SM A Particle Physicist's World - The Exchange - neutrino sector of the SM Model - quantum particles Beyond the Standard Model - particle detectors - where the SM fails - the exchange model - the Higgs boson - Feynman diagrams - the hierarchy problem - supersymmetry The Energy Frontier - large extra dimensions - selected new results - future experiments Eram Rizvi Lecture 3 - Royal Institution - London 2 Why do electrons not fall into lowest energy atomic orbital? Niels Bohr’s atomic model: angular momentum is quantised ⇒ only discreet orbitals allowed Why do electrons not collapse into low energy state? Eram Rizvi Lecture 3 - Royal Institution - London 3 What do we mean by ‘electron’ ? Quantum particles possess spin charge = -1 Measured in units of ħ = h/2π spin = ½ 2 mass = 0.511 MeV/c All particles -

That's a Lot to PROCESS! Pitfalls of Popular Path Models
1 That’s a lot to PROCESS! Pitfalls of Popular Path Models Julia M. Rohrer,1 Paul Hünermund,2 Ruben C. Arslan,3 & Malte Elson4 Path models to test claims about mediation and moderation are a staple of psychology. But applied researchers sometimes do not understand the underlying causal inference problems and thus endorse conclusions that rest on unrealistic assumptions. In this article, we aim to provide a clear explanation for the limited conditions under which standard procedures for mediation and moderation analysis can succeed. We discuss why reversing arrows or comparing model fit indices cannot tell us which model is the right one, and how tests of conditional independence can at least tell us where our model goes wrong. Causal modeling practices in psychology are far from optimal but may be kept alive by domain norms which demand that every article makes some novel claim about processes and boundary conditions. We end with a vision for a different research culture in which causal inference is pursued in a much slower, more deliberate and collaborative manner. Psychologists often do not content themselves with claims about the mere existence of effects. Instead, they strive for an understanding of the underlying processes and potential boundary conditions. The PROCESS macro (Hayes, 2017) has been an extraordinarily popular tool for these purposes, as it empowers users to run mediation and moderation analyses—as well as any combination of the two—with a large number of pre-programmed model templates in a familiar software environment. However, psychologists’ enthusiasm for PROCESS models may sometimes outpace their training. -

1. Yesterday, How Many Times Did You Eat Vegetables, Not Counting French Fries?
EFNEP Youth Group Checklist Grades 6th- 8th Name Date This is not a test. There are no wrong answers. Please answer the questions for yourself. Circle the answer that best describes you. For these questions, think about how you usually do things. 0 1 2 3 4 1. Yesterday, how many times did you eat vegetables, not counting French fries? Include cooked vegetables, canned vegetables None 1 time 2 times 3 times 4+ times and salads. If you ate two different vegetables in a meal or a snack, count them as two times. 2. Yesterday, how many times did you eat fruit, not counting juice? Include fresh, frozen, canned, and None 1 time 2 times 3 times 4+ times dried fruits. If you ate two different fruits in a meal or a snack, count them as two times. 3. Yesterday, how many times did you drink nonfat or 1% low-fat milk? Include low-fat chocolate or None 1 time 2 times 3 times 4+ times flavored milk, and low-fat milk on cereal. 4. Yesterday, how many times did you drink sweetened drinks like soda, fruit-flavored drinks, sports None 1 time 2 times 3 times drinks, energy drinks and vitamin water? Do not include 100% fruit juice. 5. When you eat grain products, how often do you eat whole grains, like Once in a Most of brown rice instead of white rice, Never Sometimes Always while the time whole grain bread instead of white bread and whole grain cereals? 6. When you eat out at a restaurant or fast food place, how often do Once in a Most of Never Sometimes Always you make healthy choices when while the time deciding what to eat? 0 1 2 3 4 5 6 7 7. -

The Inconsistency of the Usual Galilean Transformation in Quantum Mechanics and How to Fix It Daniel M
The Inconsistency of the Usual Galilean Transformation in Quantum Mechanics and How To Fix It Daniel M. Greenberger City College of New York, New York, NY 10031, USA Reprint requests to Prof. D. G.; [email protected] Z. Naturforsch. 56a, 67-75 (2001); received February 8, 2001 Presented at the 3rd Workshop on Mysteries, Puzzles and Paradoxes in Quantum Mechanics, Gargnano, Italy, September 17-23, 2000 It is shown that the generally accepted statement that one cannot superpose states of different mass in non-relativistic quantum mechanics is inconsistent. It is pointed out that the extra phase induced in a moving system, which was previously thought to be unphysical, is merely the non-relativistic residue of the “twin-paradox” effect. In general, there are phase effects due to proper time differences between moving frames that do not vanish non-relativistically. There are also effects due to the equivalence of mass and energy in this limit. The remedy is to include both proper time and rest energy non-relativis- tically. This means generalizing the meaning of proper time beyond its classical meaning, and introduc ing the mass as its conjugate momentum. The result is an uncertainty principle between proper time and mass that is very general, and an integral role for both concepts as operators in non-relativistic physics. Key words: Galilean Transformation; Symmetry; Superselection Rules; Proper Time; Mass. Introduction We show that from another point of view it is neces sary to be able to superpose different mass states non- It is a generally accepted rule in non-relativistic quan relativistically.