PROTOTYPE FLIGHT MANAGEMENT CAPABILITIES to EXPLORE TEMPORAL RNP CONCEPTS Abstract Introduction Background
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Flight Inspection History Written by Scott Thompson - Sacramento Flight Inspection Office (May 2008)
Flight Inspection History Written by Scott Thompson - Sacramento Flight Inspection Office (May 2008) Through the brief but brilliant span of aviation history, the United States has been at the leading edge of advancing technology, from airframe and engines to navigation aids and avionics. One key component of American aviation progress has always been the airway and navigation system that today makes all-weather transcontinental flight unremarkable and routine. From the initial, tentative efforts aimed at supporting the infant air mail service of the early 1920s and the establishment of the airline industry in the 1930s and 1940s, air navigation later guided aviation into the jet age and now looks to satellite technology for direction. Today, the U.S. Federal Aviation Administration (FAA) provides, as one of many services, the management and maintenance of the American airway system. A little-seen but still important element of that maintenance process is airborne flight inspection. Flight inspection has long been a vital part of providing a safe air transportation system. The concept is almost as old as the airways themselves. The first flight inspectors flew war surplus open-cockpit biplanes, bouncing around with airmail pilots and watching over a steadily growing airway system predicated on airway light beacons to provide navigational guidance. The advent of radio navigation brought an increased importance to the flight inspector, as his was the only platform that could evaluate the radio transmitters from where they were used: in the air. With the development of the Instrument Landing System (ILS) and the Very High Frequency Omni-directional Range (VOR), flight inspection became an essential element to verify the accuracy of the system. -

John V. Augustin, “ICAO and the Use of Force Against Civil Aerial Intruders”
INFORMATION TO USERS This manuscript has been reproduced from the microfilm mater. UMI films the t.xt directly from the original or copy submitted. ThuI, sorne thesil and dissertation copies are in typewriter face, while others may be from any type of computer printer. The quallty of thl. reproduction 1••pendent upon the quallty of the cOPY IUbmittecl. Broken or indistinct print, coIored or poor qUBlity illustrations and photographs, print bleedthrough, subsfanctard margins, and improper alignment can adverselyaffect reproduction. ln the unlikely .vent that the adhor did not send UMI a comptete m8l1uscript and there are mi.ing pagel, the.. will be noted. AllO, if unauthortzed copyright material had ta be removed, a note will indicat8 the deletian. Qversize material. (•.g., map., drawingl, chartl) are reproduced by sectioning the original, begiming al the upper Ieft·...d corner 8I1d continui"", tram Ieft to right in equal sec:tionI with small overtaPl. Photographs induded in the original manuscript h8ve been reprodUCld xerographically in thil capy. Higher quality 8- x 9- bl8ck and white photographie prints are aVllilllble for .,y photogl'8Phl or illustrations 8ppearing in thil capy for an addlticnll charge. Contllct UMI direclly 10 ORIer. Bell & HoweIIlnf0nn8tion and Leaming 300 North Z8eb Raad. Ann Arbor. MI 48108-1348 USA 800-521-0800 • ICAO AND THE USE OF FORCE AGAINST CIVIL AERIAL INTRUDERS by John V. Augustin A thesis submitted ta the Faculty ofGraduate Studies and Research in partial fulfilment of the degree of Master of Laws (LL.M.) Institute of Air and Space Law Faculty of Law, McGill University Montreal, Quebec, canada August 1998 1.V. -

FAA Airspace Classifications
United States Main article: Airspace class (United States) The U.S. adopted a slightly modified version of the ICAO system on September 16 , 1993 , when regions of airspace designated according to older classifications were converted wholesale. The exceptions are some Terminal Radar Service Areas (TRSA), which have special rules and still exist in a few places. • With some exceptions, Class A airspace is applied to all airspace between 18,000 feet(5,500 m) and Flight Level 600 (approximately 60,000 ft). Above FL600, the airspace reverts to Class E (Reference Order 7400.9P, Subpart E). The transition altitude (see Flight level ) is also consistently 18,000 feet (5,500 m). All operations in US Class A airspace must be conducted under IFR. SVFR flight in Class A airspace is prohibited. • Class B airspace is used around major airports , in a funnel shape that is designed to contain arriving and departing commercial air traffic operating under IFR, up to10,000 feet (3,000 m) above MSL (12,000 feet above Denver, Colorado ). Class C airspace is used around airports and military air bases with a moderate traffic level. Class • Class D is used for smaller airports that have a control tower. The U.S. uses a modified version of the ICAO class C and D airspace, where only radio contact with ATC rather than an ATC clearance is required for VFR operations. • Other controlled airspace is designated as Class E - this includes a large part of the lower airspace. Class E airspace exists in many forms. It can serve as a surface-based extension to Class D airspace to accommodate IFR approach/departure procedure areas. -
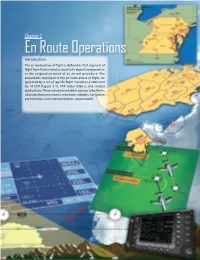
Chapter: 2. En Route Operations
Chapter 2 En Route Operations Introduction The en route phase of flight is defined as that segment of flight from the termination point of a departure procedure to the origination point of an arrival procedure. The procedures employed in the en route phase of flight are governed by a set of specific flight standards established by 14 CFR [Figure 2-1], FAA Order 8260.3, and related publications. These standards establish courses to be flown, obstacle clearance criteria, minimum altitudes, navigation performance, and communications requirements. 2-1 fly along the centerline when on a Federal airway or, on routes other than Federal airways, along the direct course between NAVAIDs or fixes defining the route. The regulation allows maneuvering to pass well clear of other air traffic or, if in visual meteorogical conditions (VMC), to clear the flightpath both before and during climb or descent. Airways Airway routing occurs along pre-defined pathways called airways. [Figure 2-2] Airways can be thought of as three- dimensional highways for aircraft. In most land areas of the world, aircraft are required to fly airways between the departure and destination airports. The rules governing airway routing, Standard Instrument Departures (SID) and Standard Terminal Arrival (STAR), are published flight procedures that cover altitude, airspeed, and requirements for entering and leaving the airway. Most airways are eight nautical miles (14 kilometers) wide, and the airway Figure 2-1. Code of Federal Regulations, Title 14 Aeronautics and Space. flight levels keep aircraft separated by at least 500 vertical En Route Navigation feet from aircraft on the flight level above and below when operating under VFR. -
Organization and Innovation in Air Traffic Control
Policy Study 431 January 2014 Organization and Innovation in Air Traffic Control by Robert W. Poole, Jr. Searle Freedom Trust Transportation Fellow Reason Foundation Reason Foundation’s mission is to advance a free society by developing, applying and promoting liber- tarian principles, including individual liberty, free markets and the rule of law. We use journalism and public policy research to influence the frameworks and actions of policymakers, journalists and opinion leaders. Reason Foundation’s nonpartisan public policy research promotes choice, competition and a dynamic market economy as the foundation for human dignity and progress. Reason produces rigorous, peer- reviewed research and directly engages the policy process, seeking strategies that emphasize coopera- tion, flexibility, local knowledge and results. Through practical and innovative approaches to complex problems, Reason seeks to change the way people think about issues, and promote policies that allow and encourage individuals and voluntary institutions to flourish. Reason Foundation is a tax-exempt research and education organization as defined under IRS code 501(c) (3). Reason Foundation is supported by voluntary contributions from individuals, foundations and cor- porations. The views are those of the author, not necessarily those of Reason Foundation or its trustees. This study was commissioned and originally published by Hudson Institute as part of its Initiative on Future Innovation. Hudson Institute is a nonpartisan, independent policy research organization dedicated to innovative research and analysis that pro- motes global security, prosperity, and freedom. Copyright © 2013 Reason Foundation. All rights reserved. Reason Foundation Organization and Innovation in Air Traffic Control By Robert W. Poole, Jr. Searle Freedom Trust Transportation Fellow Executive Summary Air travel in the United States has become safer and more reliable over the past half century. -
Aeronautical Engineering
AERONAUTICAL ENGINEERING CASE FILE COPY A SPECIAL BIBLIOGRAPHY WITH INDEXES Supplement 25 DECEMBER 1972 NATIONAL AERONAUTICS AND SPACE ADMINISTRATION PREVIOUS BIBLIOGRAPHIES IN THIS SERIES Document Dale Co verage NASA SP-7037 September 197Q Jan.-Aug. 1970 NASA SP-7037(01) January 1971 Sept.-Dec. 1970 NASA SP-7037 (02) February 1971 January 1971 NASA SP-7037 (03) March 1971 February 1971 NASA SP-7037 (04) April 1971 March 1971 NASA SP-7037 (05) May 1971 April 1971 NASA SP-7037 (06) June 1971 May 1971 NASA SP-7037 (07) July 1971 June 1971 NASA SP-7037 (08) August 1971 July 1971 NASA SP-7037(09) September 1971 August 1971 NASA SP-7037(IO) October 1971 September 1971 NASA SP-7037(11) November 1971 October 1971 NASA SP-7037 (I 2) December 1971 November 1971 NASA SP-7037 (13) January 1972 December 1971 NASA SP-7037 (14) January 1972 Annual Indexes 1971 NASA SP-7037 (15) February 1972 January 1972 NASA SP-7037 (16) March 1972 February 1972 NASA SP-7037 (17) April 1972 March 1972 NASA SP-7037 (18) May 1972 April 1972 NASA SP-7037 (19) June 1972 May 1972 NASA SP-7037 (20) July 1972 June 1972 NASA SP-7037 (21) August 1972 July 1972 NASA SP-7037 (22) September 1972 August 1972 NASA SP-7037 (23) October 1972 September 1972 NASA SP-7037 (24) November 1972 October 1972 This bibliography was prepared by the NASA Scientific and Technical Information Facility operated for the National Aeronautics and Space Administration by Informatics Tisco, Inc. The Administrator of the National Aeronautics and Space Administration has determined that the publication of this periodical is necessary in the transaction of the public business required by law of this Agency. -

GPS for IFR Use and ADF/NDB Navigation
Stage 2, Phase 3: GPS, NDB, and VOR Navigation SCENARIO 1: GPS for IFR Use and ADF/NDB Navigation (If Installed) *ATD MAY BE USED* Note: Although an ATD may be used for this scenario, the maximum time that may be credited is 10 hours (BATD) or 20 hours (AATD) instrument time for a Part 61 course [61.65(i)] or 25% (BATD) or 40% (AATD) of the total instrument training requirement (35 hours) for a Part 141 course [141 Appendix C, 4.(b)(3)]. Objective: Familiarize yourself with the GPS and its use for IFR navigation. If your airplane has a functioning ADF, you will navigate using a non-directional beacon (NDB). Purpose/pressures (real or simulated): You are flying with two friends to a ski destination and back. Where to go: A nearby airport How to get there: IFR flight plan using GPS waypoints, and NDB bearings if an ADF is installed and an NDB is available Planned deviations: To a suitable airport to deal with en route icing Planned malfunctions: RAIM unavailable NDB loss of signal Risks (real or simulated): Navigation errors due to unreliable signals Each of you is carrying ski boots and extra clothes Runway has light snow on it AIRMET Zulu and Sierra are valid for the route of flight (possibility of encountering structural icing and IMC or mountain obscurations) Destination airport is 6,388 feet MSL New this scenario: Aeronautical decision making Determining suitability of GPS for IFR flight Familiarity with avionics Navigation system orientation (GPS and/or NDB) Navigation system course intercepting and tracking (GPS and/or NDB) Navigating to a waypoint or an off-airway fix at a safe altitude Improving your skills: Risk management Checklist usage . -

Federal Civil Aviation Programs: in Brief
Federal Civil Aviation Programs: In Brief Updated January 22, 2021 Congressional Research Service https://crsreports.congress.gov R42781 Federal Civil Aviation Programs: In Brief Contents Introduction ..................................................................................................................................... 1 The Airport and Airway Trust Fund ................................................................................................ 1 FAA Funding Accounts ................................................................................................................... 3 Airport Financing ............................................................................................................................ 4 FAA Management and Organizational Issues .................................................................................. 5 Facility Consolidation ............................................................................................................... 5 Air Traffic Controller Workforce .............................................................................................. 6 The Next Generation Air Transportation System (NextGen) .......................................................... 7 Aviation Workforce ......................................................................................................................... 8 Aviation Safety Programs ................................................................................................................ 9 Airline Safety -

NWCG Standards for Airspace Coordination
A publication of the National Wildfire Coordinating Group NWCG Standards for Airspace Coordination PMS 520 May 2018 NWCG Standards for Airspace Coordination MAY 2018 PMS 520 The NWCG Standards for Airspace Coordination standardizes safe, consistent approaches to issues involving airspace and agency land management responsibilities. This is an educational process that will contribute to a clear understanding of flight and coordination within the complexities of the National Airspace System (NAS). Additionally, it promotes airspace coordination with respect to environmental issues. The objectives of the NWCG Standards for Airspace Coordination are: Describe the components of the NAS, and define airspace coordination responsibilities among the various agencies and users of the NAS. Describe the processes and procedures that an agency should employ so that users may: o Coordinate, deconflict, and conduct flight missions safely within the NAS with respect to safety concerns and operational requirements. o Coordinate, deconflict, and respond to airspace issues relating to the environment. Provide educational material aimed at both agency and military aviation and airspace managers that will contribute to a clear understanding of the complex nature of the airspace in which we all share. Identify airspace coordination responsibilities for agency personnel. The National Wildfire Coordinating Group (NWCG) provides national leadership to enable interoperable wildland fire operations among federal, state, tribal, territorial, and local partners. NWCG operations standards are interagency by design; they are developed with the intent of universal adoption by the member agencies. However, the decision to adopt and utilize them is made independently by the individual member agencies and communicated through their respective directives systems. -

Federal Register/Vol. 85, No. 215/Thursday, November 5, 2020/Proposed Rules
70532 Federal Register / Vol. 85, No. 215 / Thursday, November 5, 2020 / Proposed Rules DEPARTMENT OF TRANSPORTATION Order 7400.11E at NARA, email: All communications received on or [email protected] or go to https:// before the specified comment closing Federal Aviation Administration www.archives.gov/federal-register/cfr/ date will be considered before taking ibr-locations.html. action on the proposed rule. The 14 CFR Part 71 FOR FURTHER INFORMATION CONTACT: proposal contained in this action may [Docket No. FAA–2020–0944; Airspace Colby Abbott, Rules and Regulations be changed in light of comments Docket No. 20–AGL–26] Group, Office of Policy, Federal received. All comments submitted will Aviation Administration, 800 be available for examination in the RIN 2120–AA66 Independence Avenue SW, Washington, public docket both before and after the comment closing date. A report Proposed Amendment of V–67, V–190, DC 20591; telephone: (202) 267–8783. summarizing each substantive public SUPPLEMENTARY INFORMATION: and V–429; Establishment of T–312; contact with FAA personnel concerned and Revocation of V–125 and V–335 in Authority for This Rulemaking with this rulemaking will be filed in the the Vicinity of Marion, IL The FAA’s authority to issue rules docket. AGENCY: Federal Aviation regarding aviation safety is found in Availability of NPRMs Administration (FAA), DOT. Title 49 of the United States Code. An electronic copy of this document ACTION: Notice of proposed rulemaking Subtitle I, Section 106 describes the may be downloaded through the (NPRM). authority of the FAA Administrator. internet at https://www.regulations.gov. Subtitle VII, Aviation Programs, SUMMARY: Recently published rulemaking This action proposes to describes in more detail the scope of the amend VHF Omnidirectional Range documents can also be accessed through agency’s authority. -

FAA-H-8083-16B; Glossary
Glossary Abeam Fix. A fix, NAVAID, point, or object positioned Airport Sketch. Depicts the runways and their length, width, approximately 90 degrees to the right or left of the aircraft and slope, the touchdown zone elevation, the lighting track along a route of flight. Abeam indicates a general system installed on the end of the runway, and taxiways. position rather than a precise point. Airport sketches are located on the lower left or right portion of the instrument approach chart. Accelerate-Stop Distance Available (ASDA). The runway plus stopway length declared available and suitable for Airport Surface Detection Equipment-Model X the acceleration and deceleration of an airplane aborting a (ASDE-X). Enables air traffic controllers to detect potential takeoff. runway conflicts by providing detailed coverage of movement on runways and taxiways. By collecting data from a variety of Advanced Surface Movement Guidance and Control sources, ASDE-X is able to track vehicles and aircraft on the System (A-SMGCS). A system providing routing, guidance airport movement area and obtain identification information and surveillance for the control of aircraft and vehicles, from aircraft transponders. in order to maintain the declared surface movement rate under all weather conditions within the aerodrome visibility Air Route Traffic Control Center (ARTCC). A facility operational level (AVOL) while maintaining the required established to provide air traffic control service to aircraft level of safety. operating on IFR flight plans within controlled airspace and principally during the en route phase of flight Aircraft Approach Category. A grouping of aircraft based on reference landing speed (VREF), if specified, or if REFV is Air Traffic Service (ATS). -

PAL) Committee
Alameda County Board of Supervisors Personnel, Administration, and Legislation (PAL) Committee LEGISLATIVE POSITION REQUEST FORM Initiating department completes this form in order to propose a legislative advocacy position to the PAL Committee. When multiple departments/agencies are impacted by a PAL item, each one must add its analysis and agree to the position. Instructions for completing the form are on the back and in the flow chart. Prior to submitting this form: the County's legislative advocates (State and federal) are available to assist you with questions you may have. Please include the CAO Legislative Analyst in these communications. Please complete each item below. Submission deadline is noon on the Monday two weeks prior to the PAL meeting. CONNECTION TO ADOPTED LEGISLATIVE PLATFORM OR PRINCIPLE: Housing, Land Use, and Transportation REQUESTER’S INFORMATION: Name: Nate Miley Initiating Agency/Department: Board of Supervisors Title: County Supervisor List other impacted Agency/Departments as applicable: NA CAO Legislative Analyst: CAO Budget, Performance and Policy Analyst: RECOMMENDATION: Requester’s Recommendation: Request that the FAA consider the “Supplemental Proposals to Revising the Northern California Metroplex For Alameda County/Contra Costa County” that was submitted to the FAA in March 2017. Other Impacted Agency(ies)/Department(s) Each impacted agency check one: Co-sponsor: Endorse: No Position: BILL INFORMATION: Resolution, Author: Alameda County Bill Title: Resolution of the Board of Supervisors of the County of Alameda Requesting the Federal Aviation Administration Address Increased Aircraft Noise in Alameda County Current Resolution Status (include last Committee action and date): Current Law/Context: The airspace of Northern California is complex with traffic from multiple international and regional airports and military air activity.