Solid Angle of Conical Surfaces, Polyhedral Cones, and Intersecting Spherical Caps
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Brief Information on the Surfaces Not Included in the Basic Content of the Encyclopedia
Brief Information on the Surfaces Not Included in the Basic Content of the Encyclopedia Brief information on some classes of the surfaces which cylinders, cones and ortoid ruled surfaces with a constant were not picked out into the special section in the encyclo- distribution parameter possess this property. Other properties pedia is presented at the part “Surfaces”, where rather known of these surfaces are considered as well. groups of the surfaces are given. It is known, that the Plücker conoid carries two-para- At this section, the less known surfaces are noted. For metrical family of ellipses. The straight lines, perpendicular some reason or other, the authors could not look through to the planes of these ellipses and passing through their some primary sources and that is why these surfaces were centers, form the right congruence which is an algebraic not included in the basic contents of the encyclopedia. In the congruence of the4th order of the 2nd class. This congru- basis contents of the book, the authors did not include the ence attracted attention of D. Palman [8] who studied its surfaces that are very interesting with mathematical point of properties. Taking into account, that on the Plücker conoid, view but having pure cognitive interest and imagined with ∞2 of conic cross-sections are disposed, O. Bottema [9] difficultly in real engineering and architectural structures. examined the congruence of the normals to the planes of Non-orientable surfaces may be represented as kinematics these conic cross-sections passed through their centers and surfaces with ruled or curvilinear generatrixes and may be prescribed a number of the properties of a congruence of given on a picture. -
Compton Scattering from the Deuteron at Low Energies
SE0200264 LUNFD6-NFFR-1018 Compton Scattering from the Deuteron at Low Energies Magnus Lundin Department of Physics Lund University 2002 W' •sii" Compton spridning från deuteronen vid låga energier (populärvetenskaplig sammanfattning på svenska) Vid Compton spridning sprids fotonen elastiskt, dvs. utan att förlora energi, mot en annan partikel eller kärna. Kärnorna som användes i detta försök består av en proton och en neutron (sk. deuterium, eller tungt väte). Kärnorna bestrålades med fotoner av kända energier och de spridda fo- tonerna detekterades mha. stora Nal-detektorer som var placerade i olika vinklar runt strålmålet. Försöket utfördes under 8 veckor och genom att räkna antalet fotoner som kärnorna bestålades med och antalet spridda fo- toner i de olika detektorerna, kan sannolikheten för att en foton skall spridas bestämmas. Denna sannolikhet jämfördes med en teoretisk modell som beskriver sannolikheten för att en foton skall spridas elastiskt mot en deuterium- kärna. Eftersom protonen och neutronen består av kvarkar, vilka har en elektrisk laddning, kommer dessa att sträckas ut då de utsätts för ett elek- triskt fält (fotonen), dvs. de polariseras. Värdet (sannolikheten) som den teoretiska modellen ger, beror på polariserbarheten hos protonen och neu- tronen i deuterium. Genom att beräkna sannolikheten för fotonspridning för olika värden av polariserbarheterna, kan man se vilket värde som ger bäst överensstämmelse mellan modellen och experimentella data. Det är speciellt neutronens polariserbarhet som är av intresse, och denna kunde bestämmas i detta arbete. Organization Document name LUND UNIVERSITY DOCTORAL DISSERTATION Department of Physics Date of issue 2002.04.29 Division of Nuclear Physics Box 118 Sponsoring organization SE-22100 Lund Sweden Author (s) Magnus Lundin Title and subtitle Compton Scattering from the Deuteron at Low Energies Abstract A series of three Compton scattering experiments on deuterium have been performed at the high-resolution tagged-photon facility MAX-lab located in Lund, Sweden. -

Extension of Eigenvalue Problems on Gauss Map of Ruled Surfaces
S S symmetry Article Extension of Eigenvalue Problems on Gauss Map of Ruled Surfaces Miekyung Choi 1 and Young Ho Kim 2,* 1 Department of Mathematics Education and RINS, Gyeongsang National University, Jinju 52828, Korea; [email protected] 2 Department of Mathematics, Kyungpook National University, Daegu 41566, Korea * Correspondence: [email protected]; Tel.: +82-53-950-5888 Received: 20 September 2018; Accepted: 12 October 2018; Published: 16 October 2018 Abstract: A finite-type immersion or smooth map is a nice tool to classify submanifolds of Euclidean space, which comes from the eigenvalue problem of immersion. The notion of generalized 1-type is a natural generalization of 1-type in the usual sense and pointwise 1-type. We classify ruled surfaces with a generalized 1-type Gauss map as part of a plane, a circular cylinder, a cylinder over a base curve of an infinite type, a helicoid, a right cone and a conical surface of G-type. Keywords: ruled surface; pointwise 1-type Gauss map; generalized 1-type Gauss map; conical surface of G-type 1. Introduction Nash’s embedding theorem enables us to study Riemannian manifolds extensively by regarding a Riemannian manifold as a submanifold of Euclidean space with sufficiently high codimension. By means of such a setting, we can have rich geometric information from the intrinsic and extrinsic properties of submanifolds of Euclidean space. Inspired by the degree of algebraic varieties, B.-Y. Chen introduced the notion of order and type of submanifolds of Euclidean space. Furthermore, he developed the theory of finite-type submanifolds and estimated the total mean curvature of compact submanifolds of Euclidean space in the late 1970s ([1]). -

A Cochleoid Cone Udc 514.1=111
FACTA UNIVERSITATIS Series: Architecture and Civil Engineering Vol. 9, No 3, 2011, pp. 501 - 509 DOI: 10.2298/FUACE1103501N CONE WHOSE DIRECTRIX IS A CYLINDRICAL HELIX AND THE VERTEX OF THE DIRECTRIX IS – A COCHLEOID CONE UDC 514.1=111 Vladan Nikolić*, Sonja Krasić, Olivera Nikolić University of Niš, The Faculty of Civil Engineering and Architecture, Serbia * [email protected] Abstract. The paper treated a cone with a cylindrical helix as a directrix and the vertex on it. Characteristic elements of a surface formed in such way and the basis are identified, and characteristic flat intersections of planes are classified. Also considered is the potential of practical application of such cone in architecture and design. Key words: cocleoid cones, vertex on directrix, cylindrical helix directrix. 1. INTRODUCTION Cone is a deriving singly curved rectilinear surface. A randomly chosen point A on the directrix d1 will, along with the directirx d2 determine totally defined conical surface k, figure 1. If directirx d3 penetrates through this conical surface in the point P, then the connection line AP, regarding that it intersects all three directrices (d1, d2 and d3), will be the generatrix of rectilinear surface. If the directrix d3 penetrates through the men- tioned conical surface in two, three or more points, then through point A will pass two, three or more generatrices of the rectilinear surface.[7] Directrix of a rectilinear surface can be any planar or spatial curve. By changing the form and mutual position of the directrices, various type of rectilinear surfaces can be obtained. If the directrices d1 and d2 intersect, and the intersection point is designated with A, then the top of the created surface will occur on the directrix d2, figure 2. -

Intrinsic Volumes and Polar Sets in Spherical Space
1 INTRINSIC VOLUMES AND POLAR SETS IN SPHERICAL SPACE FUCHANG GAO, DANIEL HUG, ROLF SCHNEIDER Abstract. For a convex body of given volume in spherical space, the total invariant measure of hitting great subspheres becomes minimal, equivalently the volume of the polar body becomes maximal, if and only if the body is a spherical cap. This result can be considered as a spherical counterpart of two Euclidean inequalities, the Urysohn inequality connecting mean width and volume, and the Blaschke-Santal´oinequality for the volumes of polar convex bodies. Two proofs are given; the first one can be adapted to hyperbolic space. MSC 2000: 52A40 (primary); 52A55, 52A22 (secondary) Keywords: spherical convexity, Urysohn inequality, Blaschke- Santal´oinequality, intrinsic volume, quermassintegral, polar convex bodies, two-point symmetrization In the classical geometry of convex bodies in Euclidean space, the intrinsic volumes (or quermassintegrals) play a central role. These functionals have counterparts in spherical and hyperbolic geometry, and it is a challenge for a geometer to find analogues in these spaces for the known results about Euclidean intrinsic volumes. In the present paper, we prove one such result, an inequality of isoperimetric type in spherical (or hyperbolic) space, which can be considered as a counterpart to the Urysohn inequality and is, in the spherical case, also related to the Blaschke-Santal´oinequality. Before stating the result (at the beginning of Section 2), we want to recall and collect the basic facts about intrinsic volumes in Euclidean space, describe their noneuclidean counterparts, and state those open problems about the latter which we consider to be of particular interest. -
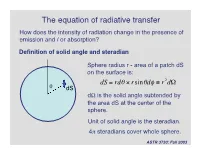
The Equation of Radiative Transfer How Does the Intensity of Radiation Change in the Presence of Emission and / Or Absorption?
The equation of radiative transfer How does the intensity of radiation change in the presence of emission and / or absorption? Definition of solid angle and steradian Sphere radius r - area of a patch dS on the surface is: dS = rdq ¥ rsinqdf ≡ r2dW q dS dW is the solid angle subtended by the area dS at the center of the † sphere. Unit of solid angle is the steradian. 4p steradians cover whole sphere. ASTR 3730: Fall 2003 Definition of the specific intensity Construct an area dA normal to a light ray, and consider all the rays that pass through dA whose directions lie within a small solid angle dW. Solid angle dW dA The amount of energy passing through dA and into dW in time dt in frequency range dn is: dE = In dAdtdndW Specific intensity of the radiation. † ASTR 3730: Fall 2003 Compare with definition of the flux: specific intensity is very similar except it depends upon direction and frequency as well as location. Units of specific intensity are: erg s-1 cm-2 Hz-1 steradian-1 Same as Fn Another, more intuitive name for the specific intensity is brightness. ASTR 3730: Fall 2003 Simple relation between the flux and the specific intensity: Consider a small area dA, with light rays passing through it at all angles to the normal to the surface n: n o In If q = 90 , then light rays in that direction contribute zero net flux through area dA. q For rays at angle q, foreshortening reduces the effective area by a factor of cos(q). -

17 Measure Concentration for the Sphere
17 Measure Concentration for the Sphere In today’s lecture, we will prove the measure concentration theorem for the sphere. Recall that this was one of the vital steps in the analysis of the Arora-Rao-Vazirani approximation algorithm for sparsest cut. Most of the material in today’s lecture is adapted from Matousek’s book [Mat02, chapter 14] and Keith Ball’s lecture notes on convex geometry [Bal97]. n n−1 Notation: We will use the notation Bn to denote the ball of unit radius in R and S n to denote the sphere of unit radius in R . Let µ denote the normalized measure on the unit sphere (i.e., for any measurable set S ⊆ Sn−1, µ(A) denotes the ratio of the surface area of µ to the entire surface area of the sphere Sn−1). Recall that the n-dimensional volume of a ball n n n of radius r in R is given by the formula Vol(Bn) · r = vn · r where πn/2 vn = n Γ 2 + 1 Z ∞ where Γ(x) = tx−1e−tdt 0 n−1 The surface area of the unit sphere S is nvn. Theorem 17.1 (Measure Concentration for the Sphere Sn−1) Let A ⊆ Sn−1 be a mea- n−1 surable subset of the unit sphere S such that µ(A) = 1/2. Let Aδ denote the δ-neighborhood n−1 n−1 of A in S . i.e., Aδ = {x ∈ S |∃z ∈ A, ||x − z||2 ≤ δ}. Then, −nδ2/2 µ(Aδ) ≥ 1 − 2e . Thus, the above theorem states that if A is any set of measure 0.5, taking a step of even √ O (1/ n) around A covers almost 99% of the entire sphere. -

Spherical Cap Packing Asymptotics and Rank-Extreme Detection Kai Zhang
IEEE TRANSACTIONS ON INFORMATION THEORY 1 Spherical Cap Packing Asymptotics and Rank-Extreme Detection Kai Zhang Abstract—We study the spherical cap packing problem with a observations can be written as probabilistic approach. Such probabilistic considerations result Pn ¯ ¯ in an asymptotic sharp universal uniform bound on the maximal i=1(Xi − X)(Yi − Y ) Cb(X; Y ) = q q inner product between any set of unit vectors and a stochastically Pn (X − X¯)2 Pn (Y − Y¯ )2 independent uniformly distributed unit vector. When the set of i=1 i i=1 i unit vectors are themselves independently uniformly distributed, (I.1) we further develop the extreme value distribution limit of where Xi’s and Yi’s are the n independent and identically the maximal inner product, which characterizes its uncertainty distributed (i.i.d.) observations of X and Y respectively, around the bound. and X¯ and Y¯ are the sample means of X and Y As applications of the above asymptotic results, we derive (1) respectively. The sample correlation coefficient possesses an asymptotic sharp universal uniform bound on the maximal spurious correlation, as well as its uniform convergence in important statistical properties and was carefully studied distribution when the explanatory variables are independently in the classical case when the number of variables is Gaussian distributed; and (2) an asymptotic sharp universal small compared to the number of observations. How- bound on the maximum norm of a low-rank elliptically dis- ever, the situation has dramatically changed in the new tributed vector, as well as related limiting distributions. With high-dimensional paradigm [1, 2] as the large number these results, we develop a fast detection method for a low-rank structure in high-dimensional Gaussian data without using the of variables in the data leads to the failure of many spectrum information. -
Slides for Statistics, Precision, and Solid Angle
Slides for Statistics, Precision, and Solid Angle 22.01 – Intro to Radiation October 14, 2015 22.01 – Intro to Ionizing Radiation Precision etc., Slide 1 Solid Angles, Dose vs. Distance • Dose decreases with the inverse square of distance from the source: 1 퐷표푠푒 ∝ 푟2 • This is due to the decrease in solid angle subtended by the detector, shielding, person, etc. absorbing the radiation 22.01 – Intro to Ionizing Radiation Precision etc., Slide 2 Solid Angles, Dose vs. Distance • The solid angle is defined in steradians, and given the symbol Ω. • For a rectangle with width w and length l, at a distance r from a point source: 푤푙 Ω = 4푎푟푐푡푎푛 2푟 4푟2 + w2 + 푙2 • A full sphere has 4π steradians (Sr) 22.01 – Intro to Ionizing Radiation Precision etc., Slide 3 Solid Angles, Dose vs. Distance http://www.powerfromthesun.net/Book/chapter02/chapter02.html • Total luminance (activity) of a source is constant, but the flux through a surface decreases with distance Courtesy of William B. Stine. Used with permission. 22.01 – Intro to Ionizing Radiation Precision etc., Slide 4 Exponential Gamma Attenuation • Gamma sources are attenuated exponentially according to this formula: Initial intensity Mass attenuation coefficient 흁 Distance through − 흆 흆풙 푰 = 푰ퟎ풆 material Transmitted intensity Material density • Attenuation means removal from a narrowly collimated beam by any means 22.01 – Intro to Ionizing Radiation Precision etc., Slide 5 Exponential Gamma Attenuation Look up values in NIST x-ray attenuation tables: http://www.nist.gov/pml/data/xraycoef/ Initial -

General Method of Solid Angle Calculation Using Attitude Kinematics
1 1 General method of solid angle calculation using attitude kinematics 2 3 Russell P. Patera1 4 351 Meredith Way, Titusville, FL 32780, United States 5 6 Abstract 7 A general method to compute solid angle is developed that is based on Ishlinskii’s theorem, which specifies the 8 relationship between the attitude transformation of an axis that completely slews about a conical region and the 9 solid angle of the enclosed region. After an axis slews about a conical region and returns to its initial orientation, it 10 will have rotated by an angle precisely equal to the enclosed solid angle. The rotation is the magnitude of the 11 Euler rotation vector of the attitude transformation produced by the slewing motion. Therefore, the solid angle 12 can be computed by first computing the attitude transformation of an axis that slews about the solid angle region 13 and then computing the solid angle from the attitude transformation. This general method to compute the solid 14 angle involves approximating the solid angle region’s perimeter as seen from the source, with a discrete set of 15 points on the unit sphere, which join a set of great circle arcs that approximate the perimeter of the region. Pivot 16 Parameter methodology uses the defining set of points to compute the attitude transformation of the axis due to 17 its slewing motion about the enclosed solid angle region. The solid angle is the magnitude of the resulting Euler 18 rotation vector representing the transformation. The method was demonstrated by comparing results to 19 published results involving the solid angles of a circular disk radiation detector with respect to point, line and disk 20 shaped radiation sources. -

Extension of Eigenvalue Problems on Gauss Map of Ruled Surfaces
Preprints (www.preprints.org) | NOT PEER-REVIEWED | Posted: 20 September 2018 doi:10.20944/preprints201809.0407.v1 Peer-reviewed version available at Symmetry 2018, 10, 514; doi:10.3390/sym10100514 EXTENSION OF EIGENVALUE PROBLEMS ON GAUSS MAP OF RULED SURFACES MIEKYUNG CHOI AND YOUNG HO KIM* Abstract. A finite-type immersion or smooth map is a nice tool to classify subman- ifolds of Euclidean space, which comes from eigenvalue problem of immersion. The notion of generalized 1-type is a natural generalization of those of 1-type in the usual sense and pointwise 1-type. We classify ruled surfaces with generalized 1-type Gauss map as part of a plane, a circular cylinder, a cylinder over a base curve of an infinite type, a helicoid, a right cone and a conical surface of G-type. 1. Introduction Nash's embedding theorem enables us to study Riemannian manifolds extensively by regarding a Riemannian manifold as a submanifold of Euclidean space with sufficiently high codimension. By means of such a setting, we can have rich geometric information from the intrinsic and extrinsic properties of submanifolds of Euclidean space. Inspired by the degree of algebraic varieties, B.-Y. Chen introduced the notion of order and type of submanifolds of Euclidean space. Furthermore, he developed the theory of finite- type submanifolds and estimated the total mean curvature of compact submanifolds of Euclidean space in the late 1970s ([3]). In particular, the notion of finite-type immersion is a direct generalization of eigen- value problem relative to the immersion of a Riemannian manifold into a Euclidean space: Let x : M ! Em be an isometric immersion of a submanifold M into the Eu- clidean m-space Em and ∆ the Laplace operator of M in Em. -

From the Geometry of Foucault Pendulum to the Topology of Planetary Waves
From the geometry of Foucault pendulum to the topology of planetary waves Pierre Delplace and Antoine Venaille Univ Lyon, Ens de Lyon, Univ Claude Bernard, CNRS, Laboratoire de Physique, F-69342 Lyon, France Abstract The physics of topological insulators makes it possible to understand and predict the existence of unidirectional waves trapped along an edge or an interface. In this review, we describe how these ideas can be adapted to geophysical and astrophysical waves. We deal in particular with the case of planetary equatorial waves, which highlights the key interplay between rotation and sphericity of the planet, to explain the emergence of waves which propagate their energy only towards the East. These minimal in- gredients are precisely those put forward in the geometric interpretation of the Foucault pendulum. We discuss this classic example of mechanics to introduce the concepts of holonomy and vector bundle which we then use to calculate the topological properties of equatorial shallow water waves. Résumé La physique des isolants topologiques permet de comprendre et prédire l’existence d’ondes unidirectionnelles piégées le long d’un bord ou d’une interface. Nous décrivons dans cette revue comment ces idées peuvent être adaptées aux ondes géophysiques et astrophysiques. Nous traitons en parti- culier le cas des ondes équatoriales planétaires, qui met en lumière les rôles clés combinés de la rotation et de la sphéricité de la planète pour expliquer l’émergence d’ondes qui ne propagent leur énergie que vers l’est. Ces ingré- dients minimaux sont précisément ceux mis en avant dans l’interprétation géométrique du pendule de Foucault.