Aeroelastic Calculations for the Hawk Aircraft Using the Euler Equations
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Turbulence in the Gulf
Come and see us at the Dubai Airshow on Stand 2018 AEROSPACE November 2017 FLYING FOR THE DARK SIDE IS MARS GETTING ANY CLOSER? HYBRID-ELECTRIC PROPULSION www.aerosociety.com November 2017 Volume 44 Number 11 Volume TURBULENCE IN THE GULF SUPERCONNECTOR AIRLINES BATTLE HEADWINDS Royal Aeronautical Society Royal Aeronautical N EC Volume 44 Number 11 November 2017 Turbulence in Is Mars getting any 14 the Gulf closer? How local politics Sarah Cruddas and longer-range assesses the latest aircraft may 18 push for a human impact Middle mission to the Red East carriers. Planet. Are we any Contents Clément Alloing Martin Lockheed nearer today? Correspondence on all aerospace matters is welcome at: The Editor, AEROSPACE, No.4 Hamilton Place, London W1J 7BQ, UK [email protected] Comment Regulars 4 Radome 12 Transmission The latest aviation and Your letters, emails, tweets aeronautical intelligence, and feedback. analysis and comment. 58 The Last Word Short-circuiting electric flight 10 Antenna Keith Hayward considers the Howard Wheeldon looks at the current export tariff spat over MoD’s planned Air Support to the Bombardier CSeries. Can a UK low-cost airline and a US start-up bring electric, green airline travel Defence Operational Training into service in the next decade? On 27 September easyJet revealed it had (ASDOT) programme. partnered with Wright Electric to help develop a short-haul all-electric airliner – with the goal of bringing it into service within ten years. If realised, this would represent a game-changing leap for aviation and a huge victory for aerospace Features Cobham in meeting or even exceeding its sustainable goals. -

Military Aircraft Markings Update Number 76, September 2011
Military Aircraft Markings Update Number 76, September 2011 Serial Type (other identity) [code] Owner/operator, location or fate N6466 DH82A Tiger Moth (G-ANKZ) Privately owned, Compton Abbas T7842 DH82A Tiger Moth II (G-AMTF) Privately owned, Westfield, Surrey DE623 DH82A Tiger Moth II (G-ANFI) Privately owned, Cardiff KK116 Douglas Dakota IV (G-AMPY) AIRBASE, Coventry TD248 VS361 Spitfire LF XVIE (7246M/G-OXVI) [CR-S] Spitfire Limited, Humberside TX310 DH89A Dragon Rapide 6 (G-AIDL) Classic Flight, Coventry VN799 EE Canberra T4 (WJ874/G-CDSX) AIRBASE, Coventry VP981 DH104 Devon C2 (G-DHDV) Classic Flight, Coventry WA591 Gloster Meteor T7 (7917M/G-BWMF) [FMK-Q] Classic Flight, Coventry WB188 Hawker Hunter GA11 (WV256/G-BZPB) AIRBASE, Coventry WD413 Avro 652A Anson T21 (7881M/G-VROE) Classic Flight, Coventry WK163 EE Canberra B2/6 (G-BVWC) AIRBASE, Coventry WK436 DH112 Venom FB50 (J-1614/G-VENM) Classic Flight, Coventry WM167 AW Meteor NF11 (G-LOSM) Classic Flight, Coventry WR470 DH112 Venom FB50 (J-1542/G-DHVM) Classic Flight, Coventry WT722 Hawker Hunter T8C (G-BWGN) [878/VL] AIRBASE, Coventry WV318 Hawker Hunter T7B (9236M/G-FFOX) WV318 Group, Cotswold Airport WZ798 Slingsby T38 Grasshopper TX1 Privately owned, stored Hullavington XA109 DH115 Sea Vampire T22 Montrose Air Station Heritage Centre XE665 Hawker Hunter T8C (G-BWGM) [876/VL] Classic Flight, Coventry XE689 Hawker Hunter GA11 (G-BWGK) [864/VL] AIRBASE, Coventry XE985 DH115 Vampire T11 (WZ476) Privately owned, New Inn, Torfaen XG592 WS55 Whirlwind HAS7 [54] Task Force Adventure -

The Economics of the UK Aerospace Industry: a Transaction Cost Analysis
The economics of the UK aerospace industry: A transaction cost analysis of defence and civilian firms Ian Jackson PhD Department of Economics and Related Studies University of York 2004 Abstract The primaryaim of this thesisis to assessvertical integration in the UK aerospace industrywith a transactioncost approach. There is an extensivetheoretical and conceptualliterature on transactioncosts, but a relativelack of empiricalwork. This thesisapplies transaction cost economics to the UK aerospaceindustry focusing on the paradigmproblem of the make-or-buydecision and related contract design. It assesses whetherthe transactioncost approachis supported(or rejected)by evidencefrom an originalsurvey of theUK aerospaceindustry. The centralhypothesis is that UK aerospacefirms are likely to makecomponents in- housedue to higherlevels of assetspecificity, uncertainty, complexity, frequency and smallnumbers, which is reflectedin contractdesign. The thesismakes these concepts operational.The empiricalmethodology of the thesisis basedon questionnairesurvey dataand econometric tests using Ordinary Least Squares (OLS) andlogit regressions to analysethe make-or-buy decision and the choiceof contracttype. The resultsfrom this thesisfind limited evidencein supportof the transactioncost approachapplied to the UK aerospaceindustry, in spiteof a bespokedataset. The empiricaltests of verticalintegration for both make-or-buyand contracttype as the dependentvariable yield insufficientevidence to concludethat the transactioncost approachis an appropriateframework -

Case Study BAE Systems Eurofighter Typhoon
Executive Summary Eurofighter Typhoon is the world’s most advanced swing-role combat aircraft. A highly agile aircraft, it is capable of ground-attack as well as air defence. With 620 aircraft on order, it is also the largest and most complex European military aviation project currently running. A collaboration between Germany, Italy, Spain and the UK, it is designed to meet air force requirements well into the 21st Century. Advanced electronics and state of the art onboard computers are critical to the Typhoon’s high performance and agility. These systems need to be safe, reliable and easily maintained over the estimated 25 year lifecycle of the aircraft. The Ada programming language was therefore the natural choice for Typhoon’s onboard computers. It provides a high-integrity, high-quality development environment with a well defined structure that is designed to produce highly reliable and maintainable real-time software. Typhoon is currently the largest European Ada project with over 500 developers working in the language. Tranche 1 of the project saw 1.5 million lines of code being created. BAE Systems is a key member of the Eurofighter consortium, responsible for a number of areas including the aircraft’s cockpit. As part of latest phase of the project (named “Tranche 2”) it needed a solution for host Ada compilation in the development of software for the Typhoon’s mission computers, as well as for desktop testing. BAE Systems selected GNAT Pro from AdaCore in 2002 for this mission-critical and safety-critical area of the project. AdaCore has been closely involved with the Ada language since its inception and was able to provide a combination of multi-language technology and world-leading support to BAE Systems. -

Download Thesis
This electronic thesis or dissertation has been downloaded from the King’s Research Portal at https://kclpure.kcl.ac.uk/portal/ Assessing the British Carrier Debate and the Role of Maritime Strategy Bosbotinis, James Awarding institution: King's College London The copyright of this thesis rests with the author and no quotation from it or information derived from it may be published without proper acknowledgement. END USER LICENCE AGREEMENT Unless another licence is stated on the immediately following page this work is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International licence. https://creativecommons.org/licenses/by-nc-nd/4.0/ You are free to copy, distribute and transmit the work Under the following conditions: Attribution: You must attribute the work in the manner specified by the author (but not in any way that suggests that they endorse you or your use of the work). Non Commercial: You may not use this work for commercial purposes. No Derivative Works - You may not alter, transform, or build upon this work. Any of these conditions can be waived if you receive permission from the author. Your fair dealings and other rights are in no way affected by the above. Take down policy If you believe that this document breaches copyright please contact [email protected] providing details, and we will remove access to the work immediately and investigate your claim. Download date: 27. Sep. 2021 Assessing the British Carrier Debate and the Role of Maritime Strategy James Bosbotinis PhD in Defence Studies 2014 1 Abstract This thesis explores the connection between seapower, maritime strategy and national policy, and assesses the utility of a potential Maritime Strategy for Britain. -
Hippag™ Compressor Systems
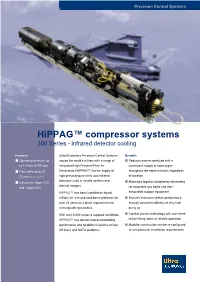
Precision Control Systems HiPPAG™ compressor systems 300 Series - infrared detector cooling Features Ultra Electronics Precision Control Systems Benefits Operating pressure up equips the world’s military with a range of Reduces aircrew workload with a to 414 bar (6,000 psi) integrated High Pressure Pure Air continuous supply of cooling gas Flow rates up to 20 Generators (HiPPAG™) for the supply of throughout the entire mission, regardless SL/min (Sea Level/STP) high-pressure pure air to cool infrared of duration detectors used in missile seekers and Minimises logistics footprint by eliminating Gas purity <2ppm CO2 thermal imagers. rechargeable gas bottle and their and <1ppm H2O HiPPAG™ has been installed on-board associated support equipment military air, sea and land borne platforms for Ensures maximum seeker performance over 25 years as a direct replacement for through consistent delivery of very high rechargeable gas bottles. purity air With over 6,500 systems supplied worldwide, Combat proven technology with over three million flying hours of reliable operation HiPPAG™ has demonstrated outstanding performance and reliability in-service on key Modular construction can be re-configured US Navy and NATO platforms. to suit particular installation requirements Precision Control Systems HiPPAG™ - high performance compressor and filtration systems Ultra offers HiPPAG™ systems as either ‘military -off-the-shelf’ or custom designed solutions to meet platform specific requirements. Ultra has over 25 years of experience in working with customers to offer the best value fully compliant and low risk solution to the most demanding of applications. The HiPPAG™ 345 is able to support multiple IR seekers from a single unit, reducing overall system cost and complexity. -

Military Aircraft Markings Update Number 133, June 2016
Military Aircraft Markings Update Number 133, June 2016 Serial Type (other identity) [code] Owner/operator, location or fate C6468 RAF SE5a <R> (G-CEKL) [A] Sold to the USA as N17SE, 2010 E2977 Avro 504K (G-EBHB) Privately owned, Henlow F2367 Sopwith 7F.1 Snipe <R> (ZK-SNI) WW1 Aviation Heritage Trust, Stow Maries K3731 Isaacs Fury (G-RODI) Privately owned, Barkston Heath K5682 Isaacs Fury II (S1579/G-BBVO) [6] Privately owned, Felthorpe N9503 DH82A Tiger Moth (G-ANFP) [39] Privately owned, Henstridge R5246 DH82A Tiger Moth II (D-EDHA) [40] Privately owned, Heringsdorf, Germany T6562 DH82A Tiger Moth II (G-ANTE) Repainted as G-ANTE W3632 VS509 Spitfire T9 (PV202/H-98/G-CCCA) Repainted as PV202 Z5252 Hawker Hurricane IIB (G-BWHA/Z5053) [GO-B] Privately owned, stored Milden AD370 Jurca Spitfire (G-CHBW) [PJ-C] Privately owned, Perranporth BL924 VS349 Spitfire VB <R> (BAPC 242) [AZ-G] Beale Park, Pangbourne, Berks BL927 Supermarine Aircraft Spitfire 26 (G-CGWI) [JH-I] Privately owned, Perth EN570 VS361 Spitfire F IX (G-CISP) Sold to Norway, April 2016 GZ100 AgustaWestland AW109SP Grand New (G-ZIOO) RAF No 32(The Royal) Sqn, Northolt HB737 Fairchild Argus III (G-BCBH) Privately owned, Paddock Wood, Kent KH570 Titan T-51B Mustang (G-CIXK) [5J-X] Privately owned, Sywell NJ728 Auster AOP5 (G-AIKE) Privately owned, Yarcombe, Devon PG657 DH82A Tiger Moth II (G-AGPK) Privately owned, Clacton PV202 VS509 Spitfire T9 (H-98/W3632/G-CCCA) [5R-H] Historic Flying Ltd, Duxford RM169 Percival P31 Proctor IV (G-ANVY) [4-47] Privately owned, Great Oakley, -

The Finnish Air Force BAE Systems Hawk
The Finnish Air Force t Hawk 66 Hawk 51 BAE Systems Hawk The BAE Systems Hawk is a British single-engined two-seat advanced jet trainer. The Finnish Air Force's Hawks bear the military designation HW and are operated by Fighter Squadron 41 of the the Air Force Academy, primarily in advanced and tactical training roles. In the Hawk, a cadet pursuing a fighter pilot's career gets his or her first taste of jet flying after having learnt basic flying skills at the controls of a piston-engined aircraft. The first (advanced) Hawk training phase, designated HW 1, starts during the second year of cadets' studies in the National Defence University and consists of Hawk type rating, navigation, instrument flying, aerobatics, formation flying, and night flying. The next (lead-in) phase, known as HW 2, focuses on tactical training and consists of basic air-to-air and air-to-ground work before students progress to the more demanding Hornet multi-role fighter. The Hawk can also carry air sampling pods that were used extensively during the volcanic ash crisis in the spring of 2010. The Hawk has has limited engagement capability against attack aircraft, helicopters and other equivalent targets under favorable conditions. The Hawk is also flown by the Air Force's official display team the Midnight Hawks, in which case the team's four aircraft are fitted with smoke generators for enhanced visual effect. Team pilots are flight instructors. During the 2017 display season six aircraft used by the team received a special blue-and-white livery in celebration of the 100th anniversary of Finland’s independence. -

Part 2 — Aircraft Type Designators (Decode) Partie 2 — Indicatifs De Types D'aéronef (Décodage) Parte 2 — Designadores De Tipos De Aeronave (Descifrado) Часть 2
2-1 PART 2 — AIRCRAFT TYPE DESIGNATORS (DECODE) PARTIE 2 — INDICATIFS DE TYPES D'AÉRONEF (DÉCODAGE) PARTE 2 — DESIGNADORES DE TIPOS DE AERONAVE (DESCIFRADO) ЧАСТЬ 2. УСЛОВНЫЕ ОБОЗНАЧЕНИЯ ТИПОВ ВОЗДУШНЫХ СУДОВ ( ДЕКОДИРОВАНИЕ ) DESIGNATOR MANUFACTURER, MODEL DESCRIPTION WTC DESIGNATOR MANUFACTURER, MODEL DESCRIPTION WTC INDICATIF CONSTRUCTEUR, MODÈLE DESCRIPTION WTC INDICATIF CONSTRUCTEUR, MODÈLE DESCRIPTION WTC DESIGNADOR FABRICANTE, MODELO DESCRIPCIÓN WTC DESIGNADOR FABRICANTE, MODELO DESCRIPCIÓN WTC УСЛ . ИЗГОТОВИТЕЛЬ , МОДЕЛЬ ВОЗДУШНОГО WTC УСЛ . ИЗГОТОВИТЕЛЬ , МОДЕЛЬ ВОЗДУШНОГО WTC ОБОЗНАЧЕНИЕ ОБОЗНАЧЕНИЕ A1 DOUGLAS, Skyraider L1P M NORTH AMERICAN ROCKWELL, Quail CommanderL1P L DOUGLAS, AD Skyraider L1P M NORTH AMERICAN ROCKWELL, A-9 Sparrow L1P L DOUGLAS, EA-1 Skyraider L1P M Commander NORTH AMERICAN ROCKWELL, A-9 Quail CommanderL1P L A2RT KAZAN, Ansat 2RT H2T L NORTH AMERICAN ROCKWELL, Sparrow CommanderL1P L A3 DOUGLAS, TA-3 Skywarrior L2J M DOUGLAS, NRA-3 SkywarriorL2J M A10 FAIRCHILD (1), OA-10 Thunderbolt 2 L2J M DOUGLAS, A-3 Skywarrior L2J M FAIRCHILD (1), A-10 Thunderbolt 2L2J M FAIRCHILD (1), Thunderbolt 2L2J M DOUGLAS, ERA-3 SkywarriorL2J M AVIADESIGN, A-16 Sport Falcon L1P L DOUGLAS, Skywarrior L2J M A16 AEROPRACT, A-19 L1P L A3ST AIRBUS, Super Transporter L2J H A19 AIRBUS, Beluga L2J H A20 DOUGLAS, Havoc L2P M DOUGLAS, A-20 Havoc L2P M AIRBUS, A-300ST Super TransporterL2J H AEROPRACT, Solo L1P L AIRBUS, A-300ST Beluga L2J H A21 SATIC, Beluga L2J H AEROPRACT, A-21 Solo L1P L SATIC, Super Transporter L2J H A22 SADLER, Piranha -
Vayu Issue V Sep Oct 2012
V/2012 ARerospace &Defence eview The IAF at 80 Ongoing Strategic Transformation Face of the Future “The Right Stuff” Riveting the Relationship The IAF at 100 : a wish list HAWK - THE BEST TRAINING SOLUTION FOR THE BEST PILOTS. *CFM, LEAP and the CFM logo are all trademarks of CFM International, a 50/50 joint company of Snecma (Safran Group) and GE. of CFM International, a 50/50 joint company Snecma (Safran *CFM, LEAP and the CFM logo are all trademarks REAL TECHNOLOGY.REAL ADVANTAGE. Produced in partnership with Hindustan Aeronautics Ltd, the Hawk Advanced Jet Trainer complimented by a suite of ground based synthetic training aids has made a step change in Indian Air Force 1003 innovations. fast jet training. With high levels of reliability and serviceability the Hawk 30 years of experience. Training System is proving to be both a cost effective and highly productive 3 aircraft applications. solution; one which provides India with high quality front line pilots as well as 1 huge leap forward for engine design. high technology employment for the Indian aerospace workforce. Another proven breakthrough for LEAP technology. The numbers tell the story. Hundreds of patented LEAP technological innovations and nearly 600 million hours of CFM* flight experience all add up to a very special engine you can count on for the future. Visit cfmaeroengines.com www.baesystems.com EX4128 India Ad_Hawk.indd 1 27/09/2012 12:28 VAYU_Engine_280x215.indd 1 12/09/2012 12:52 V/2012 V/2012 Aerospace &Defence Review ‘Ongoing strategic Face of the Future New Generation -

2014 Full-Year Results Data Appendix
2014 Full-Year Results Data Appendix © 2015 Rolls-Royce plc The information in this document is the property of Rolls-Royce plc and may not be copied or communicated to a third party, or used for any purpose other than that for which it is supplied without the express written consent of Rolls-Royce plc. This information is given in good faith based upon the latest information available to Rolls-Royce plc, no warranty or representation is given concerning such information, which must not be taken as establishing any contractual or other commitment binding upon Rolls-Royce plc or any of its subsidiary or associated companies. All figures on an underlying basis unless otherwise stated. Please see note 2 of the Financial Review for definition. Trusted to deliver excellence Table of contents 2 Section Page The Group 3 Financials 13 Civil aerospace 21 Defence aerospace 28 Power Systems 33 Marine 36 Nuclear & Energy 41 Nuclear 43 3 The Group Roadmap: Our transformation 4 2011-2013 2014-2017 2018-2020 Began focus on 4Cs Transforming our Delivering the benefits business; growing our installed base Customer Rising Civil Large Engine Growing installed base, deliveries cash & margins Concentration Restructuring/ 20% footprint reduction Cost underutilisation Technology investment Cash Land & Sea cost & integration focus Land & Sea growth Trusted to deliver excellence Group results 2014 full-year (including divested Energy) 5 Group revenue £14.6 billion Order book £73.7 billion Civil 10% 11% Defence 48% OE 47% Power Systems 71.6 73.7 52% -

Lot 1 Corgi the Aviation Archive English Electric Lightning F.6
Warren and Wignall Auctioneers - Toys & Models - Starts 03 Jun 2020 Lot 1 Corgi The Aviation Archive English Electric Lightning F.6 XR728/JS, RAF No.11 Squadron, Binkbrook, 1:48 sacle die-cast model AA28401 limited edition number 1420/2000 boxed with collectors card and appears unopened. UK P&P £12+VAT (combined postage calculated post sale) Estimate: 30 - 50 Fees: 21% inc VAT for absentee bids, telephone bids and bidding in person 24.6% inc VAT for Live Bidding and Autobids Lot 2 Corgi The Aviation Archive Handley Page Halifax B.VII PN230/EQ-V 'Vicky The Vicious Virgin' RAF No.408 'Goose' Squadron, No. 6 (RCAF) Group, Linton-On-Ouse, 1945, 1:72 scale die-cast model AA37208 limited edition number 0360/2000 boxed with collectors card and appears unopened. UK P&P £12+VAT (combined postage calculated post sale) Estimate: 30 - 50 Fees: 21% inc VAT for absentee bids, telephone bids and bidding in person 24.6% inc VAT for Live Bidding and Autobids Lot 3 Corgi The Aviation Archive BAC TSR2, XR220, RAF Museum, Cosford, Shropshire, 1:72 scale die-cast model AA38603 limited edition number 516/1500 boxed with collectors card and appears unopened. UK P&P £12+VAT (combined postage calculated post sale) Estimate: 30 - 50 Fees: 21% inc VAT for absentee bids, telephone bids and bidding in person 24.6% inc VAT for Live Bidding and Autobids Lot 4 Corgi The Aviation Archive Avro Lancaster B.II ED888/PM-M2 'Mike Squared', RAF No. 103 Squadron, Elshaw Wolds, Lincolnshire, Late 1944, 75th Anniversary of the Lancaster, 1:72 scale die-cast model AA32624 limited edition boxed, lacking collectors card.