Design Elements of a Mobile Robotics Course Based on Student Feedback
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Annual Report 2014 OUR VISION
AMOS Centre for Autonomous Marine Operations and Systems Annual Report 2014 Annual Report OUR VISION To establish a world-leading research centre for autonomous marine operations and systems: To nourish a lively scientific heart in which fundamental knowledge is created through multidisciplinary theoretical, numerical, and experimental research within the knowledge fields of hydrodynamics, structural mechanics, guidance, navigation, and control. Cutting-edge inter-disciplinary research will provide the necessary bridge to realise high levels of autonomy for ships and ocean structures, unmanned vehicles, and marine operations and to address the challenges associated with greener and safer maritime transport, monitoring and surveillance of the coast and oceans, offshore renewable energy, and oil and gas exploration and production in deep waters and Arctic waters. Editors: Annika Bremvåg and Thor I. Fossen Copyright AMOS, NTNU, 2014 www.ntnu.edu/amos AMOS • Annual Report 2014 Table of Contents Our Vision ........................................................................................................................................................................ 2 Director’s Report: Licence to Create............................................................................................................................. 4 Organization, Collaborators, and Facts and Figures 2014 ......................................................................................... 6 Presentation of New Affiliated Scientists................................................................................................................... -

An Introduction to the NASA Robotics Alliance Cadets Program
Session F An Introduction to the NASA Robotics Alliance Cadets Program David R. Schneider, Clare van den Blink NASA, DAVANNE, & Cornell University / Cornell University CIT [email protected], [email protected] Abstract The 2006 report National Defense Education and Innovation Initiative highlighted this nation’s growing need to revitalize undergraduate STEM education. In response, NASA has partnered with the DAVANNE Corporation to create the NASA Robotics Alliance Cadets Program to develop innovative, highly integrated and interactive curriculum to redesign the first two years of Mechanical Engineering, Electrical Engineering and Computer Science. This paper introduces the NASA Cadets Program and provides insight into the skill areas targeted by the program as well as the assessment methodology for determining the program’s effectiveness. The paper also offers a brief discussion on the capabilities of the program’s robotic platform and a justification for its design into the program. As an example of the integration of the robotic platform with the program’s methodologies, this paper concludes by outlining one of the first educational experiments of NASA Cadets Program at Cornell University to be implemented in the Spring 2007 semester. I. Introduction To be an engineer is to be a designer, a creator of new technology, and the everyday hero that solves society’s problems through innovative methods and products by making ideas become a reality. However, the opportunity to truly explore these key concepts of being an engineer are often withheld from most incoming engineering students until at least their junior year causing many new students to lose motivation and potentially leave the program. -

Upgrading a Legacy Outdoors Robotic Vehicle4
Upgrading a Legacy Outdoors Robotic Vehicle4 1 1 2 Theodosis Ntegiannakis , Odysseas Mavromatakis , Savvas Piperidis , and Nikos C. Tsourveloudis3 1 Theodosis Ntegiannakis and Odysseas Mavromatakis are graduate students at the School of Production Engineering and Management, Technical University of Crete, Hellas. 2 corresponding author: Intelligent Systems and Robotics Laboratory, School of Production Engineering and Management, Technical University of Crete, 73100 Chania, Hellas, [email protected], www.robolab.tuc.gr 3 School of Production Engineering and Management, Technical University of Crete, Hellas, [email protected], www.robolab.tuc.gr Abstract. ATRV-mini was a popular, 2000's commercially available, outdoors robot. The successful upgrade procedure of a decommissioned ATRV-mini is presented in this paper. Its robust chassis construction, skid steering ability, and optional wifi connectivity were the major rea- sons for its commercial success, mainly for educational and research pur- poses. However the advances in electronics, microcontrollers and software during the last decades were not followed by the robot's manufacturer. As a result, the robot became obsolete and practically useless despite its good characteristics. The upgrade used up to date, off the shelf compo- nents and open source software tools. There was a major enhancement at robot's processing power, energy consumption, weight and autonomy time. Experimental testing proved the upgraded robot's operational in- tegrity and capability of undertaking educational, research and other typical robotic tasks. Keywords: all terrain autonomous robotic vehicle, educational robotics, ROS, robot upgrade, solar panels. 1 Introduction This work deals with the upgrading procedure of a decommissioned Real World Interface (RWI) ATRV-mini all-terrain robotic vehicle. -
The Chirps Prototyping System
Digital Commons @ George Fox University Faculty Publications - Department of Electrical Department of Electrical Engineering and Engineering and Computer Science Computer Science 2011 The hirC ps Prototyping System Gary Spivey George Fox University, [email protected] Follow this and additional works at: http://digitalcommons.georgefox.edu/eecs_fac Part of the Electrical and Computer Engineering Commons Recommended Citation Spivey, Gary, "The hirC ps Prototyping System" (2011). Faculty Publications - Department of Electrical Engineering and Computer Science. Paper 9. http://digitalcommons.georgefox.edu/eecs_fac/9 This Article is brought to you for free and open access by the Department of Electrical Engineering and Computer Science at Digital Commons @ George Fox University. It has been accepted for inclusion in Faculty Publications - Department of Electrical Engineering and Computer Science by an authorized administrator of Digital Commons @ George Fox University. For more information, please contact [email protected]. The Chirps Prototyping System Abstract Oregon State University has been a pioneer in developing a “Platform for Learning” using their TekBots platform as a fundamental part of their electrical and computer engineering curriculum. At George Fox University, we fundamentally affirm this concept of a “Platform for Learning,” but we additionally desire a “Platform for Prototyping.” By “Platform for Prototyping,” we mean a platform that will enable our engineering students to create significant engineering projects as part of a myriad of service-learning projects, student research, course projects, and the senior capstone experience. To be effective across our curriculum, this system must not only be usable by mechanical, electrical and computer engineers, but by engineering students at the end of their first year in the engineering program. -

The Personal Rover Project: the Comprehensive Design of A
Robotics and Autonomous Systems 42 (2003) 245–258 The Personal Rover Project: The comprehensive design of a domestic personal robot Emily Falcone∗, Rachel Gockley, Eric Porter, Illah Nourbakhsh The Robotics Institute, Carnegie Mellon University, Newell-Simon Hall 3111, 5000 Forbes Ave., Pittsburgh, PA 15213, USA Abstract In this paper, we summarize an approach for the dissemination of robotics technologies. In a manner analogous to the personal computer movement of the early 1980s, we propose that a productive niche for robotic technologies is as a long-term creative outlet for human expression and discovery. To this end, this paper describes our ongoing efforts to design, prototype and test a low-cost, highly competent personal rover for the domestic environment. © 2003 Elsevier Science B.V. All rights reserved. Keywords: Social robots; Educational robot; Human–robot interaction; Personal robot; Step climbing 1. Introduction duration of interaction and the roles played by human and robot participants. In cases where the human care- Robotics occupies a special place in the arena of giver provides short-term, nurturing interaction to a interactive technologies. It combines sophisticated robot, research has demonstrated the development of computation with rich sensory input in a physical effective social relationships [5,12,21]. Anthropomor- embodiment that can exhibit tangible and expressive phic robot design can help prime such interaction ex- behavior in the physical world. periments by providing immediately comprehensible In this regard, a central question that occupies our social cues for the human subjects [6,17]. research group pertains to the social niche of robotic In contrast, our interest lies in long-term human– artifacts in the company of the robotically uninitiated robot relationships, where a transient suspension of public-at-large: What is an appropriate first role for in- disbelief will prove less relevant than long-term social telligent human–robot interaction in the daily human engagement and growth. -
4 Perception 79
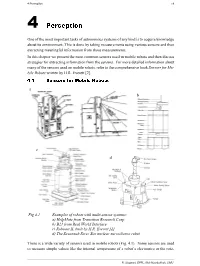
4 Perception 79 4 Perception One of the most important tasks of autonomous systems of any kind is to acquire knowledge about its environment. This is done by taking measurements using various sensors and then extracting meaningful information from those measurements. In this chapter we present the most common sensors used in mobile robots and then discuss strategies for extracting information from the sensors. For more detailed information about many of the sensors used on mobile robots, refer to the comprehensive book Sensors for Mo- bile Robots written by H.R. Everett [2]. 4.1 Sensors for Mobile Robots a b c d Fig 4.1 Examples of robots with multi-sensor systems: a) HelpMate from Transition Research Corp. b) B21 from Real World Interface c) Roboart II, built by H.R. Everett [2] d) The Savannah River Site nuclear surveillance robot There is a wide variety of sensors used in mobile robots (Fig. 4.1). Some sensors are used to measure simple values like the internal temperature of a robot’s electronics or the rota- R. Siegwart, EPFL, Illah Nourbakhsh, CMU 80 Autonomous Mobile Robots tional speed of the motors. Other, more sophisticated sensors can be used to acquire infor- mation about the robot’s environment or even to directly measure a robot’s global position. In this chapter we focus primarily on sensors used to extract information about the robot’s environment. Because a mobile robot moves around, it will frequently encounter unfore- seen environmental characteristics, and therefore such sensing is particularly critical. We begin with a functional classification of sensors. -

Autonomous Underwater Surveillance Robot
IOSR Journal of Electronics and Communication Engineering (IOSR-JECE) e-ISSN: 2278-2834,p- ISSN: 2278-8735.Volume 10, Issue 3, Ver. IV (May - Jun.2015), PP 53-61 www.iosrjournals.org Autonomous Underwater Surveillance Robot Shruti Nautiyal1, Anshuman Mehta2 1(UG Student, Department of ECE, Seemant Institute of Technology, Pithoragarh, Uttrakhand, India) 2(UG Student, Department of Mechanical Engineering, Sikkim Manipal Institute of Technology, India) Abstract: The main objective is to create an interface that allows a person to drive a robot in water and capturing the view through a night camera (360 degrees). Mobile robotic platforms are becoming more and more popular, both in scientific research and in commercial settings. Robotic systems are useful for going places or performing tasks that are not suitable for humans to do. Robots are often able to precisely perform complicated or dangerous tasks with little or no human involvement. However, before a mobile robotic platform is able to be deployed, it must have a way of identifying where it is in relation to objects and obstacles around it. Often, this is being performed by using a visual system, such as a camera. However, just wiring a camera onto a robot is not sufficient. With many of the tasks that are given to a robotic system to perform, a great deal of precision is required to satisfactorily complete these tasks. This precision requires that the robot be given accurate information by the camera. Keywords: AUVs; centre of gravity; buoyancy; thrusters; ARDUINO Board; L298; HT 12E Encoder and 12D Decoder; 434 MHZ TXR & RXR I. -

Open-Source Reinforcement Learning Framework and Robot Manipulation Benchmark
SURREAL: Open-Source Reinforcement Learning Framework and Robot Manipulation Benchmark Linxi Fan∗ Yuke Zhu∗ Jiren Zhu Zihua Liu Orien Zeng Anchit Gupta Joan Creus-Costa Silvio Savarese Li Fei-Fei Stanford Vision and Learning Lab (SVL) Department of Computer Science, Stanford University surreal.stanford.edu Abstract: Reproducibility has been a significant challenge in deep reinforcement learning and robotics research. Open-source frameworks and standardized bench- marks can serve an integral role in rigorous evaluation and reproducible research. We introduce SURREAL, an open-source scalable framework that supports state- of-the-art distributed reinforcement learning algorithms. We design a principled distributed learning formulation that accommodates both on-policy and off-policy learning. We demonstrate that SURREAL algorithms outperform existing open- source implementations in both agent performance and learning efficiency. We also introduce SURREAL Robotics Suite, an accessible set of benchmarking tasks in physical simulation for reproducible robot manipulation research. We provide extensive evaluations of SURREAL algorithms and establish strong baseline results. Keywords: Robot Manipulation, Reinforcement Learning, Distributed Learning Systems, Reproducible Research 1 Introduction Reinforcement learning (RL) has been an established framework in robotics to learn controllers via trial and error [1]. Classic reinforcement learning literature in robotics has largely relied on handcrafted features and shallow models [2, 3]. The recent success of deep neural networks in learning representations [4] has incentivized researchers to use them as powerful function approximators to tackle more complex control problems, giving rise to deep reinforcement learning [5, 6]. Prior work has explored the potentials of using deep RL for robot manipulation [7, 8]. Recently we have witnessed an increasing number of successful demonstrations of deep RL in simulated environments [9, 10, 11] and on real hardware [12, 13]. -

Pixy Hardware Interface
SSttrriikkeerr EEL 4914 Senior Design I Group 8 Cruz, Efrain Decamp, Loubens Narvaez, Luis Thomas, Brian Competitive Autonomous Air-Hockey Gaming system Table of Contents Table of Contents .................................................................................................. i 1 Executive Summary .......................................................................................... 1 2 Project Description ............................................................................................ 3 2.1 Motivation ................................................................................................................. 3 2.2 Goals and Objectives ................................................................................................. 4 2.3 Requirements and Specifications ........................................................................... 4 2.3.1 User Interface .................................................................................................... 4 2.3.2 Audio and Visual Effects .................................................................................... 6 2.3.3 Tracking System ................................................................................................. 7 2.3.4 Software .............................................................................................................. 9 2.3.5 System Hardware .............................................................................................. 10 2.3.6 Puck Return Mechanism .................................................................................. -

Botball Kit for Teaching Engineering Computing
Botball Kit for Teaching Engineering Computing David P. Miller Charles Winton School of AME Department of CIS University of Oklahoma University of N. Florida Norman, OK 73019 Jacksonville, FL 32224 Abstract Many engineering classes can benefit from hands on use of robots. The KISS Institute Botball kit has found use in many classes at a number of universities. This paper outlines how the kit is used in a few of these different classes at a couple of different universities. This paper also introduces the Collegiate Botball Challenge, and how it can be used as a class project. 1 Introduction Introductory engineering courses are used to teach general principles while introducing the students to all of the engineering disciplines. Robotics, as a multi-disciplinary application can be an ideal subject for projects that stress the different engineering fields. A major consideration in establishing a robotics course emphasizing mobile robots is the type of hands-on laboratory experience that will be incorporated into the course of instruction. Most electrical engineering schools lack the machine shops and expertise needed to create the mechanical aspects of a robot system. Most mechanical engineering schools lack the electronics labs and expertise needed for the actuation, sensing and computational aspects required to support robotics work. The situation is even more dire for most computer science schools. Computer science departments typically do not have the support culture for the kind of laboratories that are more typically associated with engineering programs. On the other hand, it is recognized that computer science students need courses which provide closer to real world experiences via representative hands-on exercises. -

A Multi-Robot Search and Retrieval System
From: AAAI Technical Report WS-02-18. Compilation copyright © 2002, AAAI (www.aaai.org). All rights reserved. MinDART : A Multi-Robot Search & Retrieval System Paul E. Rybski, Amy Larson, Heather Metcalf, Devon Skyllingstad, Harini Veeraraghavan and Maria Gini Department of Computer Science and Engineering, University of Minnesota 4-192 EE/CS Building Minneapolis, MN 55455 {rybski,larson,hmetcalf,dsky,harini,gini}@cs.umn.edu Abstract We are interested in studying how environmental and control factors affect the performance of a homogeneous multi-robot team doing a search and retrieval task. We have constructed a group of inexpensive robots called the Minnesota Distributed Autonomous Robot Team (MinDART) which use simple sen- sors and actuators to complete their tasks. We have upgraded these robots with the CMUCam, an inexpensive camera sys- tem that runs a color segmentation algorithm. The camera allows the robots to localize themselves as well as visually recognize other robots. We analyze how the team’s perfor- mance is affected by target distribution (uniform or clumped), size of the team, and whether search with explicit localization is more beneficial than random search. Introduction Cooperating teams of robots have the potential to outper- form a single robot attempting an identical task. Increasing Figure 1: The robots with their infrared targets and colored task or environmental knowledge may also improve perfor- landmarks. mance, but increased performance comes at a price. In addi- tion to the monetary concerns of building multiple robots, AAAI 2002 Mobile Robot Competition and Exhibition. Fi- the complexity of the control strategy and the processing nally, we analyze how we would expect these robots to per- overhead can outweigh the benefits. -

Robo-Gym Ï¿½ an Open Source Toolkit for Distributed Deep Reinforcement
2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) October 25-29, 2020, Las Vegas, NV, USA (Virtual) robo-gym – An Open Source Toolkit for Distributed Deep Reinforcement Learning on Real and Simulated Robots Matteo Lucchi∗, Friedemann Zindler∗, Stephan Muhlbacher-Karrer,¨ Horst Pichler Abstract— Applying Deep Reinforcement Learning (DRL) to complex tasks in the field of robotics has proven to be very successful in the recent years. However, most of the publications focus either on applying it to a task in simulation or to a task in a real world setup. Although there are great examples of combining the two worlds with the help of transfer learning, it often requires a lot of additional work and fine-tuning to make the setup work effectively. In order to increase the use of DRL with real robots and reduce the gap between simulation and real world robotics, we propose an open source toolkit: robo- gym1. We demonstrate a unified setup for simulation and real environments which enables a seamless transfer from training in simulation to application on the robot. We showcase the capabilities and the effectiveness of the framework with two real world applications featuring industrial robots: a mobile robot and a robot arm. The distributed capabilities of the framework enable several advantages like using distributed algorithms, separating the workload of simulation and training on different physical machines as well as enabling the future opportunity to train in simulation and real world at the same time. Finally, we offer an overview and comparison of robo-gym with other frequently used state-of-the-art DRL frameworks.