Botball Kit for Teaching Engineering Computing
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Robot Operating System - the Complete Reference (Volume 4) Part of the Studies in Computational Intelligence Book Series (SCI, Volume 831)
Book Robot Operating System - The Complete Reference (Volume 4) Part of the Studies in Computational Intelligence book series (SCI, volume 831) Several authors CISTER-TR-190702 2019 Book CISTER-TR-190702 Robot Operating System - The Complete Reference (Volume 4) Robot Operating System - The Complete Reference (Volume 4) Several authors CISTER Research Centre Rua Dr. António Bernardino de Almeida, 431 4200-072 Porto Portugal Tel.: +351.22.8340509, Fax: +351.22.8321159 E-mail: https://www.cister-labs.pt Abstract This is the fourth volume of the successful series Robot Operating Systems: The Complete Reference, providing a comprehensive overview of robot operating systems (ROS), which is currently the main development framework for robotics applications, as well as the latest trends and contributed systems. The book is divided into four parts: Part 1 features two papers on navigation, discussing SLAM and path planning. Part 2 focuses on the integration of ROS into quadcopters and their control. Part 3 then discusses two emerging applications for robotics: cloud robotics, and video stabilization. Part 4 presents tools developed for ROS; the first is a practical alternative to the roslaunch system, and the second is related to penetration testing. This book is a valuable resource for ROS users and wanting to learn more about ROS capabilities and features. © 2019 CISTER Research Center 1 www.cister-labs.pt Studies in Computational Intelligence 831 Anis Koubaa Editor Robot Operating System (ROS) The Complete Reference (Volume 4) Studies in Computational Intelligence Volume 831 Series Editor Janusz Kacprzyk, Polish Academy of Sciences, Warsaw, Poland [email protected] The series “Studies in Computational Intelligence” (SCI) publishes new develop- ments and advances in the various areas of computational intelligence—quickly and with a high quality. -
Challenge Bowl 2020
Notice: study guide will be updated after the December general election. Sponsored by the Muscogee (Creek) Nation Challenge Bowl 2020 High School Study Guide Sponsored by the Challenge Bowl 2020 Muscogee (Creek) Nation Table of Contents A Struggle To Survive ................................................................................................................................ 3-4 1. Muscogee History ......................................................................................................... 5-30 2. Muscogee Forced Removal ........................................................................................... 31-50 3. Muscogee Customs & Traditions .................................................................................. 51-62 4. Branches of Government .............................................................................................. 63-76 5. Muscogee Royalty ........................................................................................................ 77-79 6. Muscogee (Creek) Nation Seal ...................................................................................... 80-81 7. Belvin Hill Scholarship .................................................................................................. 82-83 8. Wilbur Chebon Gouge Honors Team ............................................................................. 84-85 9. Chronicles of Oklahoma ............................................................................................... 86-97 10. Legends & Stories ...................................................................................................... -

New Method for Robotic Systems Architecture
NEW METHOD FOR ROBOTIC SYSTEMS ARCHITECTURE ANALYSIS, MODELING, AND DESIGN By LU LI Submitted in partial fulfillment of the requirements For the degree of Master of Science Thesis Advisor: Dr. Roger Quinn Department of Mechanical and Aerospace Engineering CASE WESTERN RESERVE UNIVERSITY August 2019 CASE WESTERN RESERVE UNIVERSITY SCHOOL OF GRADUATE STUDIES We hereby approve the thesis/dissertation of Lu Li candidate for the degree of Master of Science. Committee Chair Dr. Roger Quinn Committee Member Dr. Musa Audu Committee Member Dr. Richard Bachmann Date of Defense July 5, 2019 *We also certify that written approval has been obtained for any proprietary material contained therein. ii Table of Contents Table of Contents ................................................................................................................................................ i List of Tables ....................................................................................................................................................... ii List of Figures .................................................................................................................................................... iii Copyright page .................................................................................................................................................. iv Preface ..................................................................................................................................................................... v Acknowledgements -

Upgrading a Legacy Outdoors Robotic Vehicle4
Upgrading a Legacy Outdoors Robotic Vehicle4 1 1 2 Theodosis Ntegiannakis , Odysseas Mavromatakis , Savvas Piperidis , and Nikos C. Tsourveloudis3 1 Theodosis Ntegiannakis and Odysseas Mavromatakis are graduate students at the School of Production Engineering and Management, Technical University of Crete, Hellas. 2 corresponding author: Intelligent Systems and Robotics Laboratory, School of Production Engineering and Management, Technical University of Crete, 73100 Chania, Hellas, [email protected], www.robolab.tuc.gr 3 School of Production Engineering and Management, Technical University of Crete, Hellas, [email protected], www.robolab.tuc.gr Abstract. ATRV-mini was a popular, 2000's commercially available, outdoors robot. The successful upgrade procedure of a decommissioned ATRV-mini is presented in this paper. Its robust chassis construction, skid steering ability, and optional wifi connectivity were the major rea- sons for its commercial success, mainly for educational and research pur- poses. However the advances in electronics, microcontrollers and software during the last decades were not followed by the robot's manufacturer. As a result, the robot became obsolete and practically useless despite its good characteristics. The upgrade used up to date, off the shelf compo- nents and open source software tools. There was a major enhancement at robot's processing power, energy consumption, weight and autonomy time. Experimental testing proved the upgraded robot's operational in- tegrity and capability of undertaking educational, research and other typical robotic tasks. Keywords: all terrain autonomous robotic vehicle, educational robotics, ROS, robot upgrade, solar panels. 1 Introduction This work deals with the upgrading procedure of a decommissioned Real World Interface (RWI) ATRV-mini all-terrain robotic vehicle. -

Meet the Rookies of 2007!
Team 1511 Presents Brought to you by Meet the Rookies of 2007! During the 2007 competitive season, 261 rookie teams participated in Harris RF Communications Penfield High School, 37 Regional Competitions (including a pilot in Brazil). All of the 261 Rookie Penfield NY Teams are winners, and we applaud their efforts and their accomplishments! But, not all Rookie Teams can make it to the FIRST Championship… We hope you will agree that the 42 Rookie Teams competing this week in www.penfieldrobotics.com Atlanta represent the “Best of the Best”! To help you get to know them we have prepared this overview of each of the Rookie Teams. All Rookie Meet and Greet These teams: Competed at 49 Regional competitions Who's Invited: All 2007 Rookie Teams!! (and any veterans that want to meet Received 36 Rookie All Star Awards this year's great rookie teams!) 2 Rookie Inspiration Awards When: Thursday, April 12, 12:30pm (following webhug) 13 Highest Rookie Seeds Where: Lawn under the photo banner in the Courtyard They also picked up awards for imagery, creativity, technology, website, and What's Happening: Fun Introduction Game, Distribution of Great Rookie innovation in control. Wow! packets with tons of information on Atlanta & your upcoming years, Meet & These teams: Greet other Rookie Teams! Find out what it took for them to get to Atlanta! Were alliance partners in 28 quarterfinal rounds, (sometimes as captains) Bonuses!!: Free Prizes for Rookies!! Group Photo of all Rookie Teams (emailed With 17 making it to the semi-finals, to you!!), Rookie Summary Booklet - get some great info on all the Rookies at 10 moving on to the finals, Championships! and 8 teams were Regional Champions! They have met all the challenges, some with surprising ease and Rah Cha Cha Ruckus III (RCCR 2007) some with great grit and determination. -

Robotic Paradigms and Control Architectures
Robotic Paradigms and Control Architectures Jan Faigl Department of Computer Science Faculty of Electrical Engineering Czech Technical University in Prague Lecture 02 B4M36UIR – Artificial Intelligence in Robotics Jan Faigl, 2020 B4M36UIR – Lecture 02: Robotic Paradigms 1 / 46 Overview of the Lecture Part 1 – Robotic Paradigms and Control Architectures Robotics Paradigms Hierarchical Paradigm Reactive Paradigm Hybrid Paradigm Example of Collision Avoidance Robot Control Jan Faigl, 2020 B4M36UIR – Lecture 02: Robotic Paradigms 2 / 46 Robotics Paradigms Hierarchical Paradigm Reactive Paradigm Hybrid Paradigm Example of Collision Avoidance Robot Control Part I Part 1 – Robotic Paradigms and Control Architectures Jan Faigl, 2020 B4M36UIR – Lecture 02: Robotic Paradigms 3 / 46 Robotics Paradigms Hierarchical Paradigm Reactive Paradigm Hybrid Paradigm Example of Collision Avoidance Robot Control Outline Robotics Paradigms Hierarchical Paradigm Reactive Paradigm Hybrid Paradigm Example of Collision Avoidance Robot Control Jan Faigl, 2020 B4M36UIR – Lecture 02: Robotic Paradigms 4 / 46 Robotics Paradigms Hierarchical Paradigm Reactive Paradigm Hybrid Paradigm Example of Collision Avoidance Robot Control Robot A robot perceives an environment using sensors to control its actuators. Sensor Controller Actuators The main parts of the robot correspond to the primitives of robotics: Sense, Plan, and Act. The primitives form a control architecture that is called robotic paradigm. Jan Faigl, 2020 B4M36UIR – Lecture 02: Robotic Paradigms 5 / 46 Robotics Paradigms Hierarchical Paradigm Reactive Paradigm Hybrid Paradigm Example of Collision Avoidance Robot Control Robotic Paradigms Robotic paradigms define relationship between the robotics primitives: Sense, Plan, and Act. Three fundamental paradigms have been propose. 1. Hierarchical paradigm is purely deliberative system. SENSEPLAN ACT 2. Reactive paradigm represents reactive control. SENSE ACT 3. -

The Personal Rover Project: the Comprehensive Design of A
Robotics and Autonomous Systems 42 (2003) 245–258 The Personal Rover Project: The comprehensive design of a domestic personal robot Emily Falcone∗, Rachel Gockley, Eric Porter, Illah Nourbakhsh The Robotics Institute, Carnegie Mellon University, Newell-Simon Hall 3111, 5000 Forbes Ave., Pittsburgh, PA 15213, USA Abstract In this paper, we summarize an approach for the dissemination of robotics technologies. In a manner analogous to the personal computer movement of the early 1980s, we propose that a productive niche for robotic technologies is as a long-term creative outlet for human expression and discovery. To this end, this paper describes our ongoing efforts to design, prototype and test a low-cost, highly competent personal rover for the domestic environment. © 2003 Elsevier Science B.V. All rights reserved. Keywords: Social robots; Educational robot; Human–robot interaction; Personal robot; Step climbing 1. Introduction duration of interaction and the roles played by human and robot participants. In cases where the human care- Robotics occupies a special place in the arena of giver provides short-term, nurturing interaction to a interactive technologies. It combines sophisticated robot, research has demonstrated the development of computation with rich sensory input in a physical effective social relationships [5,12,21]. Anthropomor- embodiment that can exhibit tangible and expressive phic robot design can help prime such interaction ex- behavior in the physical world. periments by providing immediately comprehensible In this regard, a central question that occupies our social cues for the human subjects [6,17]. research group pertains to the social niche of robotic In contrast, our interest lies in long-term human– artifacts in the company of the robotically uninitiated robot relationships, where a transient suspension of public-at-large: What is an appropriate first role for in- disbelief will prove less relevant than long-term social telligent human–robot interaction in the daily human engagement and growth. -
4 Perception 79
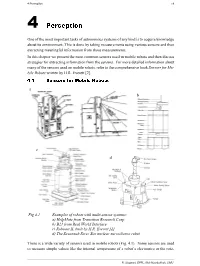
4 Perception 79 4 Perception One of the most important tasks of autonomous systems of any kind is to acquire knowledge about its environment. This is done by taking measurements using various sensors and then extracting meaningful information from those measurements. In this chapter we present the most common sensors used in mobile robots and then discuss strategies for extracting information from the sensors. For more detailed information about many of the sensors used on mobile robots, refer to the comprehensive book Sensors for Mo- bile Robots written by H.R. Everett [2]. 4.1 Sensors for Mobile Robots a b c d Fig 4.1 Examples of robots with multi-sensor systems: a) HelpMate from Transition Research Corp. b) B21 from Real World Interface c) Roboart II, built by H.R. Everett [2] d) The Savannah River Site nuclear surveillance robot There is a wide variety of sensors used in mobile robots (Fig. 4.1). Some sensors are used to measure simple values like the internal temperature of a robot’s electronics or the rota- R. Siegwart, EPFL, Illah Nourbakhsh, CMU 80 Autonomous Mobile Robots tional speed of the motors. Other, more sophisticated sensors can be used to acquire infor- mation about the robot’s environment or even to directly measure a robot’s global position. In this chapter we focus primarily on sensors used to extract information about the robot’s environment. Because a mobile robot moves around, it will frequently encounter unfore- seen environmental characteristics, and therefore such sensing is particularly critical. We begin with a functional classification of sensors. -
Botball 2020!
Welcome to Botball 2020! Before we get started… 1. Sign in, and collect your materials and electronics. 2. KIPR staff will come around with a flash drive that will have all of the files you need Charge your Wombat batteries per instructions on next couple slides. KIPR Wombat Controller 4. Open the “2020 Parts List” folder, which contains files that list all of your Botball robot kit components. Please go through the lists and verify that you have received everything. 5. Review slides 2 to ~44 (up to the KIPR Software Suite slide). 6. Build the DemoBot(s). Raise your hand if you need help or have questions. Professional Development Workshop Page : 1 © 1993 – 2020 KIPR # Index of Workshop Slides Day 1 Day 2 • Charging KIPR Robotics Controller • Botball Game Review • Botball Overview • Tournament Code Template • Getting started with the KIPR Software Suite • Fun with Functions • Explaining the “Hello, World!” C Program • Repetition, Repetition: Counting • Designing Your Own Program • Moving the iRobot Create: Part 1 • Moving the DemoBot with Motors • Moving the iRobot Create: Part 2 • Moving the DemoBot Servos • Color Camera • Making Smarter Robots with Sensors • iRobot Create Sensors • Repetition, Repetition: Reacting • Logical Operators • Motor Position Counters • Resources and Support • Making a Choice • Line-following • Homework Professional Development Workshop Page : 2 © 1993 – 2020 KIPR # Workshop Goals Day 1 Day 2 • Botball Overview / What’s New! • Botball Game Review • Build DemoBot (optional Create Bot) • Tournament Code Template • Reviewing “Day 1” slides • Create (can be on day 1) • Using the KIPR Software Suite to perform • Debugging connection problems with create activities to your team’s experience level • Reviewing “Day 2” slides • The slides have activities (Tasks) with • Documentation connections to skills you may need or • Resources and Support find helpful for solving challenges found in Botball games. -

Introduction
Introduction IJCAI-01 Conference Committee IJCAI-01 Program Committee: Contents: CONFERENCE CHAIR: Elisabeth André, DFKI GmbH (Germany) Introduction 2 Hector J. Levesque, University of Toronto (Canada) Minoru Asada, Osaka University (Japan) Sponsors & Committees 2-3 Franz Baader, RWTH Aachen (Germany) PROGRAM CHAIR: IJCAI-01 Awards 4 Craig Boutilier, University of Toronto (Canada) Bernhard Nebel,Albert-Ludwigs-Universität, Freiburg Didier Dubois, IRIT-CNRS (France) Conference at a Glance 5 (Germany) Maria Fox, University of Durham (United Kingdom) Workshop Program 6-7 LOCAL ARRANGEMENTS CHAIR: Hector Geffner, Universidad Simón Bolívar Doctoral Consortium 8 James Hoard, The Boeing Company, Seattle (USA) (Venezuela) Tutorial Program 8 SECRETARY-TREASURER: Georg Gottlob,Vienna University of Technology (Austria) Conference Program Highlights 9 Ronald J. Brachman,AT&T Labs – Research (USA) Invited Speakers 10 Haym Hirsh, Rutgers University (USA) IAAI-01 Conference 11 Eduard Hovy, Information Sciences Institute (USA) Advisory Committee: Joxan Jaffar, National University of Singapore Technical Program 12-19 Bruce Buchanan, University of Pittsburgh (USA) (Singapore) Exhibit Program 20-23 Silvia Coradeschi, Örebro University (Sweden) Daphne Koller, Stanford University (USA) RoboCup 2001 24 Olivier Faugeras, INRIA (France) Fangzhen Lin, Hong Kong University of Science and Registration Information 25 Cheng Hu, Chinese Academy of Sciences (China) Technolog y (Hong Kong) General Information 25-27 Nicholas Jennings, University of London (England) Heikki Mannila, Nokia Research Center (Finland) Conference Maps 28-30 Henry Kautz, University of Washington (USA) Robert Milne, Intelligent Applications (United Kingdom) IJCAI-03 Conference 31 Robert Mercer, University of Western Ontario (Canada) Daniele Nardi, Università di Roma “La Sapienza” Special Meetings 31 Silvia Miksch,Vienna University of Technology (Italy) (Austria) Dana Nau, University of Maryland (USA) Devika Subramanian, Rice University (USA) Patrick Prosser, University of Glasgow (UK) Welcome to IJCAI-01 L. -

Embodied Evolution in Collective Robotics: a Review Nicolas Bredeche, Evert Haasdijk, Abraham Prieto
Embodied Evolution in Collective Robotics: A Review Nicolas Bredeche, Evert Haasdijk, Abraham Prieto To cite this version: Nicolas Bredeche, Evert Haasdijk, Abraham Prieto. Embodied Evolution in Collective Robotics: A Review. Frontiers in Robotics and AI, Frontiers Media S.A., 2018, 5, pp.12. 10.3389/frobt.2018.00012. hal-03313845 HAL Id: hal-03313845 https://hal.sorbonne-universite.fr/hal-03313845 Submitted on 4 Aug 2021 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. REVIEW published: 22 February 2018 doi: 10.3389/frobt.2018.00012 Embodied Evolution in Collective Robotics: A Review Nicolas Bredeche1*, Evert Haasdijk2 and Abraham Prieto3 1 Sorbonne Université, CNRS, Institute of Intelligent Systems and Robotics, ISIR, Paris, France, 2 Computational Intelligence Group, Department of Computer Science, Vrije Universiteit, Amsterdam, Netherlands, 3 Integrated Group for Engineering Research, Universidade da Coruna, Ferrol, Spain This article provides an overview of evolutionary robotics techniques applied to online distributed evolution for robot collectives, namely, embodied evolution. It provides a definition of embodied evolution as well as a thorough description of the underlying concepts and mechanisms. This article also presents a comprehensive summary of research published in the field since its inception around the year 2000, providing various perspectives to identify the major trends. -

Pixy Hardware Interface
SSttrriikkeerr EEL 4914 Senior Design I Group 8 Cruz, Efrain Decamp, Loubens Narvaez, Luis Thomas, Brian Competitive Autonomous Air-Hockey Gaming system Table of Contents Table of Contents .................................................................................................. i 1 Executive Summary .......................................................................................... 1 2 Project Description ............................................................................................ 3 2.1 Motivation ................................................................................................................. 3 2.2 Goals and Objectives ................................................................................................. 4 2.3 Requirements and Specifications ........................................................................... 4 2.3.1 User Interface .................................................................................................... 4 2.3.2 Audio and Visual Effects .................................................................................... 6 2.3.3 Tracking System ................................................................................................. 7 2.3.4 Software .............................................................................................................. 9 2.3.5 System Hardware .............................................................................................. 10 2.3.6 Puck Return Mechanism ..................................................................................