Frequency Response, Stability and Compensation
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Op Amp Stability and Input Capacitance
Amplifiers: Op Amps Texas Instruments Incorporated Op amp stability and input capacitance By Ron Mancini (Email: [email protected]) Staff Scientist, Advanced Analog Products Introduction Figure 1. Equation 1 can be written from the op Op amp instability is compensated out with the addition of amp schematic by opening the feedback loop an external RC network to the circuit. There are thousands and calculating gain of different op amps, but all of them fall into two categories: uncompensated and internally compensated. Uncompen- sated op amps always require external compensation ZG ZF components to achieve stability; while internally compen- VIN1 sated op amps are stable, under limited conditions, with no additional external components. – ZG VOUT Internally compensated op amps can be made unstable VIN2 + in several ways: by driving capacitive loads, by adding capacitance to the inverting input lead, and by adding in ZF phase feedback with external components. Adding in phase feedback is a popular method of making an oscillator that is beyond the scope of this article. Input capacitance is hard to avoid because the op amp leads have stray capaci- tance and the printed circuit board contributes some stray Figure 2. Open-loop-gain/phase curves are capacitance, so many internally compensated op amp critical stability-analysis tools circuits require external compensation to restore stability. Output capacitance comes in the form of some kind of load—a cable, converter-input capacitance, or filter 80 240 VDD = 1.8 V & 2.7 V (dB) 70 210 capacitance—and reduces stability in buffer configurations. RL= 2 kΩ VD 60 180 CL = 10 pF 150 Stability theory review 50 TA = 25˚C 40 120 Phase The theory for the op amp circuit shown in Figure 1 is 90 β 30 taken from Reference 1, Chapter 6. -

EE C128 Chapter 10
Lecture abstract EE C128 / ME C134 – Feedback Control Systems Topics covered in this presentation Lecture – Chapter 10 – Frequency Response Techniques I Advantages of FR techniques over RL I Define FR Alexandre Bayen I Define Bode & Nyquist plots I Relation between poles & zeros to Bode plots (slope, etc.) Department of Electrical Engineering & Computer Science st nd University of California Berkeley I Features of 1 -&2 -order system Bode plots I Define Nyquist criterion I Method of dealing with OL poles & zeros on imaginary axis I Simple method of dealing with OL stable & unstable systems I Determining gain & phase margins from Bode & Nyquist plots I Define static error constants September 10, 2013 I Determining static error constants from Bode & Nyquist plots I Determining TF from experimental FR data Bayen (EECS, UCB) Feedback Control Systems September 10, 2013 1 / 64 Bayen (EECS, UCB) Feedback Control Systems September 10, 2013 2 / 64 10 FR techniques 10.1 Intro Chapter outline 1 10 Frequency response techniques 1 10 Frequency response techniques 10.1 Introduction 10.1 Introduction 10.2 Asymptotic approximations: Bode plots 10.2 Asymptotic approximations: Bode plots 10.3 Introduction to Nyquist criterion 10.3 Introduction to Nyquist criterion 10.4 Sketching the Nyquist diagram 10.4 Sketching the Nyquist diagram 10.5 Stability via the Nyquist diagram 10.5 Stability via the Nyquist diagram 10.6 Gain margin and phase margin via the Nyquist diagram 10.6 Gain margin and phase margin via the Nyquist diagram 10.7 Stability, gain margin, and -
Control Systems
ECE 380: Control Systems Course Notes: Winter 2014 Prof. Shreyas Sundaram Department of Electrical and Computer Engineering University of Waterloo ii c Shreyas Sundaram Acknowledgments Parts of these course notes are loosely based on lecture notes by Professors Daniel Liberzon, Sean Meyn, and Mark Spong (University of Illinois), on notes by Professors Daniel Davison and Daniel Miller (University of Waterloo), and on parts of the textbook Feedback Control of Dynamic Systems (5th edition) by Franklin, Powell and Emami-Naeini. I claim credit for all typos and mistakes in the notes. The LATEX template for The Not So Short Introduction to LATEX 2" by T. Oetiker et al. was used to typeset portions of these notes. Shreyas Sundaram University of Waterloo c Shreyas Sundaram iv c Shreyas Sundaram Contents 1 Introduction 1 1.1 Dynamical Systems . .1 1.2 What is Control Theory? . .2 1.3 Outline of the Course . .4 2 Review of Complex Numbers 5 3 Review of Laplace Transforms 9 3.1 The Laplace Transform . .9 3.2 The Inverse Laplace Transform . 13 3.2.1 Partial Fraction Expansion . 13 3.3 The Final Value Theorem . 15 4 Linear Time-Invariant Systems 17 4.1 Linearity, Time-Invariance and Causality . 17 4.2 Transfer Functions . 18 4.2.1 Obtaining the transfer function of a differential equation model . 20 4.3 Frequency Response . 21 5 Bode Plots 25 5.1 Rules for Drawing Bode Plots . 26 5.1.1 Bode Plot for Ko ....................... 27 5.1.2 Bode Plot for sq ....................... 28 s −1 s 5.1.3 Bode Plot for ( p + 1) and ( z + 1) . -

OA-25 Stability Analysis of Current Feedback Amplifiers
OBSOLETE Application Report SNOA371C–May 1995–Revised April 2013 OA-25 Stability Analysis of Current Feedback Amplifiers ..................................................................................................................................................... ABSTRACT High frequency current-feedback amplifiers (CFA) are finding a wide acceptance in more complicated applications from dc to high bandwidths. Often the applications involve amplifying signals in simple resistive networks for which the device-specific data sheets provide adequate information to complete the task. Too often the CFA application involves amplifying signals that have a complex load or parasitic components at the external nodes that creates stability problems. Contents 1 Introduction .................................................................................................................. 2 2 Stability Review ............................................................................................................. 2 3 Review of Bode Analysis ................................................................................................... 2 4 A Better Model .............................................................................................................. 3 5 Mathematical Justification .................................................................................................. 3 6 Open Loop Transimpedance Plot ......................................................................................... 4 7 Including Z(s) ............................................................................................................... -

Example Problems and Solutions
EXAMPLE PROBLEMS AND SOLUTIONS A-5-1. In the system of Figure 5-52, x(t) is the input displacement and B(t) is the output angular displacement. Assume that the masses involved are negligibly small and that all motions are restricted to be small; therefore, the system can be considered linear. The initial conditions for x and 0 are zeros, or x(0-) = 0 and H(0-) = 0. Show that this system is a differentiating element. Then obtain the response B(t) when x(t)is a unit-step input. Solution. The equation for the system is b(X - L8) = kLB or The Laplace transform of this last equation, using zero initial conditions, gives And so Thus the system is a differentiating system. For the unit-step input X(s) = l/s,the output O(s)becomes The inverse Laplace transform of O(s)gives Figure 5-52 Mechanical system. Chapter 5 / Transient and Steady-State Response Analyses Figure 5-53 Unit-step input and the response of the mechanical s) stem shown in Figure 5-52. Note that if the value of klb is large the response O(t) approaches a pulse signal as shown in Figure 5-53. A-5-2. Consider the mechanical system shown in Figure 5-54. Suppose that the system is at rest initially [x(o) = 0, i(0) = 01, and at t = 0 it is set into motion by a unit-impulse force. Obtain a mathe- matical model for the system.Then find the motion of the system. Solution. The system is excited by a unit-impulse input. -
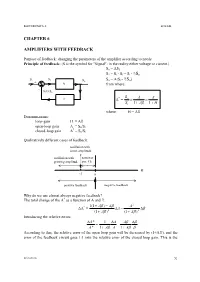
Chapter 6 Amplifiers with Feedback
ELECTRONICS-1. ZOLTAI CHAPTER 6 AMPLIFIERS WITH FEEDBACK Purpose of feedback: changing the parameters of the amplifier according to needs. Principle of feedback: (S is the symbol for Signal: in the reality either voltage or current.) So = AS1 S1 = Si - Sf = Si - ßSo Si S1 So = A(Si - S ) So ß o + A from where: - Sf=ßSo * So A A ß A = Si 1 A 1 H where: H = Aß Denominations: loop-gain H = Aß open-loop gain A = So/S1 * closed-loop gain A = So/Si Qualitatively different cases of feedback: oscillation with const. amplitude oscillation with narrower growing amplitude pos. f.b. H -1 0 positive feedback negative feedback Why do we use almost always negative feedback? * The total change of the A as a function of A and ß: 1(1 A) A A 2 A* = A (1 A) 2 (1 A) 2 Introducing the relative errors: A * 1 A A A * 1 A A 1 A According to this, the relative error of the open loop gain will be decreased by (1+Aß), and the error of the feedback circuit goes 1:1 into the relative error of the closed loop gain. This is the Elec1-fb.doc 52 ELECTRONICS-1. ZOLTAI reason for using almost always the negative feedback. (We can not take advantage of the negative sign, because the sign of the relative errors is random.) Speaking of negative or positive feedback is only justified if A and ß are real quantities. Generally they are complex quantities, and the type of the feedback is a function of the frequency: E.g. -

MT-033: Voltage Feedback Op Amp Gain and Bandwidth
MT-033 TUTORIAL Voltage Feedback Op Amp Gain and Bandwidth INTRODUCTION This tutorial examines the common ways to specify op amp gain and bandwidth. It should be noted that this discussion applies to voltage feedback (VFB) op amps—current feedback (CFB) op amps are discussed in a later tutorial (MT-034). OPEN-LOOP GAIN Unlike the ideal op amp, a practical op amp has a finite gain. The open-loop dc gain (usually referred to as AVOL) is the gain of the amplifier without the feedback loop being closed, hence the name “open-loop.” For a precision op amp this gain can be vary high, on the order of 160 dB (100 million) or more. This gain is flat from dc to what is referred to as the dominant pole corner frequency. From there the gain falls off at 6 dB/octave (20 dB/decade). An octave is a doubling in frequency and a decade is ×10 in frequency). If the op amp has a single pole, the open-loop gain will continue to fall at this rate as shown in Figure 1A. A practical op amp will have more than one pole as shown in Figure 1B. The second pole will double the rate at which the open- loop gain falls to 12 dB/octave (40 dB/decade). If the open-loop gain has dropped below 0 dB (unity gain) before it reaches the frequency of the second pole, the op amp will be unconditionally stable at any gain. This will be typically referred to as unity gain stable on the data sheet. -
Operational Amplifiers: Part 3 Non-Ideal Behavior of Feedback
Operational Amplifiers: Part 3 Non-ideal Behavior of Feedback Amplifiers AC Errors and Stability by Tim J. Sobering Analog Design Engineer & Op Amp Addict Copyright 2014 Tim J. Sobering Finite Open-Loop Gain and Small-signal analysis Define VA as the voltage between the Op Amp input terminals Use KCL 0 V_OUT = Av x Va + + Va OUT V_OUT - Note the - Av “Loop Gain” – Avβ β V_IN Rg Rf Copyright 2014 Tim J. Sobering Liberally apply algebra… 0 0 1 1 1 1 1 1 1 1 Copyright 2014 Tim J. Sobering Get lost in the algebra… 1 1 1 1 1 1 1 Copyright 2014 Tim J. Sobering More algebra… Recall β is the Feedback Factor and define α 1 1 1 1 1 Copyright 2014 Tim J. Sobering You can apply the exact same analysis to the Non-inverting amplifier Lots of steps and algebra and hand waving yields… 1 This is very similar to the Inverting amplifier configuration 1 Note that if Av → ∞, converges to 1/β and –α /β –Rf /Rg If we can apply a little more algebra we can make this converge on a single, more informative, solution Copyright 2014 Tim J. Sobering You can apply the exact same analysis to the Non-inverting amplifier Non-inverting configuration Inverting Configuration 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 Copyright 2014 Tim J. Sobering Inverting and Non-Inverting Amplifiers “seem” to act the same way Magically, we again obtain the ideal gain times an error term If Av → ∞ we obtain the ideal gain 1 1 1 Avβ is called the Loop Gain and determines stability If Avβ –1 1180° the error term goes to infinity and you have an oscillator – this is the “Nyquist Criterion” for oscillation Gain error is obtained from the loop gain 1 For < 1% gain error, 40 dB 1 (2 decades in bandwidth!) 1 Copyright 2014 Tim J. -

How to Measure the Loop Transfer Function of Power Supplies (Rev. A)
Application Report SNVA364A–October 2008–Revised April 2013 AN-1889 How to Measure the Loop Transfer Function of Power Supplies ..................................................................................................................................................... ABSTRACT This application report shows how to measure the critical points of a bode plot with only an audio generator (or simple signal generator) and an oscilloscope. The method is explained in an easy to follow step-by-step manner so that a power supply designer can start performing these measurements in a short amount of time. Contents 1 Introduction .................................................................................................................. 2 2 Step 1: Setting up the Circuit .............................................................................................. 2 3 Step 2: The Injection Transformer ........................................................................................ 4 4 Step 3: Preparing the Signal Generator .................................................................................. 4 5 Step 4: Hooking up the Oscilloscope ..................................................................................... 4 6 Step 5: Preparing the Power Supply ..................................................................................... 4 7 Step 6: Taking the Measurement ......................................................................................... 5 8 Step 7: Analyzing a Bode Plot ........................................................................................... -
Control System Design Methods
Christiansen-Sec.19.qxd 06:08:2004 6:43 PM Page 19.1 The Electronics Engineers' Handbook, 5th Edition McGraw-Hill, Section 19, pp. 19.1-19.30, 2005. SECTION 19 CONTROL SYSTEMS Control is used to modify the behavior of a system so it behaves in a specific desirable way over time. For example, we may want the speed of a car on the highway to remain as close as possible to 60 miles per hour in spite of possible hills or adverse wind; or we may want an aircraft to follow a desired altitude, heading, and velocity profile independent of wind gusts; or we may want the temperature and pressure in a reactor vessel in a chemical process plant to be maintained at desired levels. All these are being accomplished today by control methods and the above are examples of what automatic control systems are designed to do, without human intervention. Control is used whenever quantities such as speed, altitude, temperature, or voltage must be made to behave in some desirable way over time. This section provides an introduction to control system design methods. P.A., Z.G. In This Section: CHAPTER 19.1 CONTROL SYSTEM DESIGN 19.3 INTRODUCTION 19.3 Proportional-Integral-Derivative Control 19.3 The Role of Control Theory 19.4 MATHEMATICAL DESCRIPTIONS 19.4 Linear Differential Equations 19.4 State Variable Descriptions 19.5 Transfer Functions 19.7 Frequency Response 19.9 ANALYSIS OF DYNAMICAL BEHAVIOR 19.10 System Response, Modes and Stability 19.10 Response of First and Second Order Systems 19.11 Transient Response Performance Specifications for a Second Order -
Non-Integer Order Approximation of a PID-Type Controller for Boost Converters
energies Article Non-Integer Order Approximation of a PID-Type Controller for Boost Converters Allan G. S. Sánchez 1,* , Francisco J. Pérez-Pinal 2 , Martín A. Rodríguez-Licea 1 and Cornelio Posadas-Castillo 3 1 CONACYT-Instituto Tecnológico de Celaya, Guanajuato 38010, Mexico; [email protected] 2 Instituto Tecnológico de Celaya, Guanajuato 38010, Mexico; [email protected] 3 Facultad de Ingeniería Mecánica y Eléctrica, Universidad Autónoma de Nuevo León, Nuevo León 66455, Mexico; [email protected] * Correspondence: [email protected] Abstract: In this work, the voltage regulation of a boost converter is addressed. A non-integer order PID controller is proposed to deal with the closed-loop instability of the system. The average linear model of the converter is obtained through small-signal approximation. The resulting average linear model is considered divided into minimum and normalized non-minimum phase parts. This approach allows us to design a controller for the minimum phase part of the system, excluding tem- porarily the non-minimum phase one. A fractional-order PID controller approximation is suggested for the minimum phase part of the system. The proposal for the realization of the electrical controller is described and its implementation is used to corroborate its effectiveness when regulating the output voltage in the boost converter. The fractional-order PID approximation achieves regulation of the output voltage in the boost converter by exhibiting the iso-damping property and using a single Citation: Sánchez, A.G.S.; Pérez-Pinal, F.J.; Rodríguez-Licea, control loop, which confirmed its effectiveness in terms of controlling non-minimum phase/variable M.A.; Posadas-Castillo, C. -

Loop Stability Compensation Technique for Continuous-Time Common-Mode Feedback Circuits
Loop Stability Compensation Technique for Continuous-Time Common-Mode Feedback Circuits Young-Kyun Cho and Bong Hyuk Park Mobile RF Research Section, Advanced Mobile Communications Research Department Electronics and Telecommunications Research Institute (ETRI) Daejeon, Korea Email: [email protected] Abstract—A loop stability compensation technique for continuous-time common-mode feedback (CMFB) circuits is presented. A Miller capacitor and nulling resistor in the compensation network provide a reliable and stable operation of the fully-differential operational amplifier without any performance degradation. The amplifier is designed in a 130 nm CMOS technology, achieves simulated performance of 57 dB open loop DC gain, 1.3-GHz unity-gain frequency and 65° phase margin. Also, the loop gain, bandwidth and phase margin of the CMFB are 51 dB, 27 MHz, and 76°, respectively. Keywords-common-mode feedback, loop stability compensation, continuous-time system, Miller compensation. Fig. 1. Loop stability compensation technique for CMFB circuit. I. INTRODUCTION common-mode signal to the opamp. In Fig. 1, two poles are The differential output amplifiers usually contain common- newly generated from the CMFB loop. A dominant pole is mode feedback (CMFB) circuitry [1, 2]. A CMFB circuit is a introduced at the opamp output and the second pole is located network sensing the common-mode voltage, comparing it with at the VCMFB node. Typically, the location of these poles are a proper reference, and feeding back the correct common-mode very close which deteriorates the loop phase margin (PM) and signal with the purpose to cancel the output common-mode makes the closed loop system unstable.