The DL-POLY Classic User Manual
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

P1 Bus Time Schedule & Line Route
P1 bus time schedule & line map P1 Frodsham - Priestley College View In Website Mode The P1 bus line (Frodsham - Priestley College) has 2 routes. For regular weekdays, their operation hours are: (1) Frodsham: 4:15 PM (2) Wilderspool: 7:46 AM Use the Moovit App to ƒnd the closest P1 bus station near you and ƒnd out when is the next P1 bus arriving. Direction: Frodsham P1 bus Time Schedule 42 stops Frodsham Route Timetable: VIEW LINE SCHEDULE Sunday Not Operational Monday 4:15 PM Greenalls Distillery, Wilderspool Tuesday 4:15 PM Loushers Lane, Wilderspool Wilderspool Causeway, Warrington Wednesday 3:30 PM Morrisons, Wilderspool Thursday 4:15 PM Friday 4:15 PM St Thomas' Church, Stockton Heath Saturday Not Operational Mullberry Tree Pub, Stockton Heath Methodist Church, Stockton Heath The Village Terrace, Warrington P1 bus Info Belvoir Road, Walton Direction: Frodsham Stops: 42 Walton Arms, Higher Walton Trip Duration: 54 min Line Summary: Greenalls Distillery, Wilderspool, Hobb Lane, Moore Loushers Lane, Wilderspool, Morrisons, Wilderspool, St Thomas' Church, Stockton Heath, Mullberry Tree Pub, Stockton Heath, Methodist Church, Stockton Ring O Bells, Daresbury Heath, Belvoir Road, Walton, Walton Arms, Higher Walton, Hobb Lane, Moore, Ring O Bells, Daresbury, D D Park Hotel, Daresbury Delph Park Hotel, Daresbury Delph, Chester Road, Preston on the Hill, Post O∆ce, Preston Brook, Chester Road, Chester Road, Preston on the Hill Preston Brook, Travel Inn, Preston Brook, Chester Road, Murdishaw, Post O∆ce, Sutton Weaver, Aston Post O∆ce, Preston -
A Glossary of Words Used in the Dialect of Cheshire
o^v- s^ COLONEL EGERTON LEIGH. A GLOSSARY OF WORDS USED IN THE DIALECT OF CHESHIRE FOUNDED ON A SIMILAR ATTEMPT BY ROGER WILBRAHAM, F.R.S. and F.S.A, Contributed to the Society of Antiquaries in iSiy. BY LIEUT.-COL. EGERTON LEIGH, M.P. II LONDON : HAMILTON, ADAMS, AND CO. CHESTER : MINSHULL AND HUGHES. 1877. LONDON : CLAY, SONS, AND TAYLOR, PRINTERS, » ,•*• EREA2) STH4iaT^JIIJ:-L,; • 'r^UKEN, V?eTO«IVS«"gBI?t- DEDICATION. I DEDICATE this GLOSSARY OF Cheshijie Words to my friends in Mid-Cheshire, and believe, with some pleasure, that these Dialectical Fragments of our old County may now have a chance of not vanishing entirely, amid changes which are rapidly sweeping away the past, and in many cases obliterating words for which there is no substitute, or which are often, with us, better expressed by a single word than elsewhere by a sentence. EGERTON LEIGH. M24873 PRELIMINARY OBSERVATIONS ATTACHED TO WILBRAHAM'S "CHESHIRE GLOSSARY." Although a Glossary of the Words peculiar to each County of England seems as reasonable an object of curiosity as its History, Antiquities, Climate, and various Productions, yet it has been generally omitted by those persons who have un- dertaken to write the Histories of our different Counties. Now each of these counties has words, if not exclusively peculiar to that county, yet certainly so to that part of the kingdom where it is situated, and some of those words are highly beautiful and of their and expressive ; many phrases, adages, proverbs are well worth recording, and have occupied the attention and engaged the pens of men distinguished for talents and learning, among whom the name of Ray will naturally occur to every Englishman at all conversant with his mother- tongue, his work on Proverbs and on the different Dialects of England being one of the most popular ones in our PRELIMINARY OBSERVATIONS. -

DISASTERS and MISFORTUNES: the STORY of JOHN and JANE DANIELL by Martin Taylor
DISASTERS AND MISFORTUNES: THE STORY OF JOHN AND JANE DANIELL by Martin Taylor Introduction On 17th June 1601 John Daniell, the tenant of Hackney rectory, was found guilty by the Court of Star Chamber of what we would now call forgery and blackmail. He was sentenced to a period in the pillory, a term of imprisonment, and a massive fine which led to the confiscation of his property by the Exchequer. This resulted in a ten year trail of inventories, pleas and petitions which has been used to build a picture of Daniell's house in Hackney - the Parsonage House - and the lives lived in it. Perhaps uniquely for a 17th century resident of Hackney, this evidence also tells us a great deal about John Daniell himself, and his wife Jane - their attitudes, aspirations and failures - and on this part of the site we have tried to piece together the circumstances which led to the DanielIs' move to Hackney, and then to their rapid departure. The records of John's trial in Star Chamber and his later law suit against Ferdinando Heybourne (who subsequently bought the lease of the Rectory) give us a great deal of information. The papers relating to the Star Chamber action in the State Papers series are annotated by him, mostly with rather petulant comments refuting the prosecution case. Moreover, to justify his actions he wrote a narrative of his misfortunes, poignantly entitled 'Danyells Dysasters'.' This gives us a rare insight into the thought processes of an Elizabethan gentleman. Throughout this memoir, Daniell represents himself as an injured party who was 'entrapped by double dealing and powerful adversaries'.' Furthermore, we have a similar recital of the story written by Daniell's wife Jane, entitled 'The Misfortunes of Jane Danyell'.' Autobiographical material relating to an Elizabethan woman is even rarer than such material relating to an Elizabethan man. -
POLLING PLACES and WARDS FOLLOWING BOUNDARY REVIEW – to Be Confirmed by Polling Station Working Party
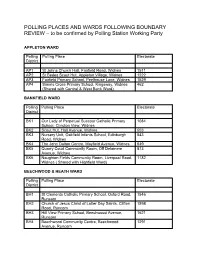
POLLING PLACES AND WARDS FOLLOWING BOUNDARY REVIEW – to be confirmed by Polling Station Working Party APPLETON WARD Polling Polling Place Electorate District AP1 St Johns Church Hall, Fairfield Road, Widnes 1511 AP2 St Bedes Scout Hut, Appleton Village, Widnes 1222 AP3 Fairfield Primary School, Peelhouse Lane, Widnes 1529 AP4 Simms Cross Primary School, Kingsway, Widnes 462 (Shared with Central & West Bank Ward) BANKFIELD WARD Polling Polling Place Electorate District BK1 Our Lady of Perpetual Succour Catholic Primary 1084 School, Clincton View, Widnes BK2 Scout Hut, Hall Avenue, Widnes 553 BK3 Nursery Unit, Oakfield Infants School, Edinburgh 843 Road, Widnes BK4 The John Dalton Centre, Mayfield Avenue, Widnes 649 BK5 Quarry Court Community Room, Off Delamere 873 Avenue, Widnes BK6 Naughton Fields Community Room, Liverpool Road, 1182 Widnes ( Shared with Highfield Ward) BEECHWOOD & HEATH WARD Polling Polling Place Electorate District BH1 St Clements Catholic Primary School, Oxford Road, 1546 Runcorn BH2 Church of Jesus Christ of Latter Day Saints, Clifton 1598 Road, Runcorn BH3 Hill View Primary School, Beechwood Avenue, 1621 Runcorn BH4 Beechwood Community Centre, Beechwood 1291 Avenue, Runcorn BIRCHFIELD WARD Polling Polling Place Electorate District BF1 Halton Farnworth Hornets, ARLFC, Wilmere Lane, 1073 Widnes BF2 Marquee Upton Tavern, Upton Lane, Widnes 3291 BF3 Mobile Polling Station, Queensbury Way, Widnes – 1659 **To be re-sited further up Queensbury Way BRIDGEWATER WARD Polling Polling Place Electorate District BW1 Brook Chapel, -

CHRONICLES of THELWALL, CO. CHESTER, with NOTICES of the SUCCESSIVE LORDS of THAT MANOR, THEIR FAMILY DESCENT, &C
379 CHRONICLES OF THELWALL, CO. CHESTER, WITH NOTICES OF THE SUCCESSIVE LORDS OF THAT MANOR, THEIR FAMILY DESCENT, &c. &c. THELWALL is a township situate within the parochial chapelry of Daresbury, and parish of Runcorn, in the East Division of the hundred of Bucklew, and deanery of Frodsham, co. Chester. It is unquestionably a place of very great antiquity, and so meagre an account has been hitherto published a as to its early history and possessors, that an attempt more fully to elucidate the subject, and to concentrate, and thereby preserve, the scat• tered fragments which yet remain as to it, from the general wreck of time, cannot fail, it is anticipated, to prove both accept• able and interesting. The earliest mention that is to be met with of Thelwall appears in the Saxon Chronicle, from which we find that, in the year 923, King Edward the Elder, son of King Alfred, made it a garrison for his soldiers, and surrounded it with fortifications. By most writers it is stated to have been founded by this monarch, but the opinion prevails with some others that it was in existence long before, and was only restored by him. Towards the latter part of the year 923, King Edward is recorded to have visited this place himself, and for some time made it his residence, whilst other portion of his troops were engaged in repairing and manning Manchester. These warlike preparations, it may be observed, were rendered necessary in consequence of Ethelwald, the son of King Ethelbert, disputing the title of Edward. -

Molecular Dynamics Simulations in Drug Discovery and Pharmaceutical Development
processes Review Molecular Dynamics Simulations in Drug Discovery and Pharmaceutical Development Outi M. H. Salo-Ahen 1,2,* , Ida Alanko 1,2, Rajendra Bhadane 1,2 , Alexandre M. J. J. Bonvin 3,* , Rodrigo Vargas Honorato 3, Shakhawath Hossain 4 , André H. Juffer 5 , Aleksei Kabedev 4, Maija Lahtela-Kakkonen 6, Anders Støttrup Larsen 7, Eveline Lescrinier 8 , Parthiban Marimuthu 1,2 , Muhammad Usman Mirza 8 , Ghulam Mustafa 9, Ariane Nunes-Alves 10,11,* , Tatu Pantsar 6,12, Atefeh Saadabadi 1,2 , Kalaimathy Singaravelu 13 and Michiel Vanmeert 8 1 Pharmaceutical Sciences Laboratory (Pharmacy), Åbo Akademi University, Tykistökatu 6 A, Biocity, FI-20520 Turku, Finland; ida.alanko@abo.fi (I.A.); rajendra.bhadane@abo.fi (R.B.); parthiban.marimuthu@abo.fi (P.M.); atefeh.saadabadi@abo.fi (A.S.) 2 Structural Bioinformatics Laboratory (Biochemistry), Åbo Akademi University, Tykistökatu 6 A, Biocity, FI-20520 Turku, Finland 3 Faculty of Science-Chemistry, Bijvoet Center for Biomolecular Research, Utrecht University, 3584 CH Utrecht, The Netherlands; [email protected] 4 Swedish Drug Delivery Forum (SDDF), Department of Pharmacy, Uppsala Biomedical Center, Uppsala University, 751 23 Uppsala, Sweden; [email protected] (S.H.); [email protected] (A.K.) 5 Biocenter Oulu & Faculty of Biochemistry and Molecular Medicine, University of Oulu, Aapistie 7 A, FI-90014 Oulu, Finland; andre.juffer@oulu.fi 6 School of Pharmacy, University of Eastern Finland, FI-70210 Kuopio, Finland; maija.lahtela-kakkonen@uef.fi (M.L.-K.); tatu.pantsar@uef.fi -
![11797 Mersey Gateway Regeneration Map Plus[Proof]](https://docslib.b-cdn.net/cover/5912/11797-mersey-gateway-regeneration-map-plus-proof-245912.webp)
11797 Mersey Gateway Regeneration Map Plus[Proof]
IMPACT AREAS SUMMARY MERSEY GATEWAY 1 West Runcorn Employment Growth Area 6 Southern Widnes 8 Runcorn Old Town Centre plus Gorsey Point LCR Growth Sector Focus: Advanced Manufacturing LCR Growth Sector Focus: Advanced Manufacturing / LCR Growth Sector Focus: Visitor Economy / Financial & Widnes REGENERATION PLAN / Low Carbon Energy Financial & Professional Services Professional Services Waterfront New & Renewed Employment Land: 82 Hectares New & Renewed Employment Land: 12 Hectares New & Renewed Employment Land: 6.3 Hectares Link Key Sites: New Homes: 215 New Homes: 530 • 22 Ha Port Of Runcorn Expansion Land Key Sites: Key Sites: Everite Road Widnes Gorsey Point • 20 Ha Port Of Weston • 5 Ha Moor Lane Roadside Commercial Frontage • Runcorn Station Quarter, 4Ha Mixed Use Retail Employment Gyratory • 30 Ha+ INOVYN World Class Chemical & Energy • 3 Ha Moor Lane / Victoria Road Housing Opportunity Area & Commercial Development Renewal Area Remodelling Hub - Serviced Plots • 4 Ha Ditton Road East Employment Renewal Area • Runcorn Old Town Centre Retail, Leisure & Connectivity Opportunities: Connectivity Opportunities: Commercial Opportunities Widnes Golf Academy 5 • Weston Point Expressway Reconfiguration • Silver Jubilee Bridge Sustainable Transport • Old Town Catchment Residential Opportunities • Rail Freight Connectivity & Sidings Corridor (Victoria Road section) Connectivity Opportunities: 6 • Moor Lane Street Scene Enhancement • Runcorn Station Multi-Modal Passenger 3MG Phase 3 West Widnes Halton Lea Healthy New Town Transport Hub & Improved -
Department of Physics Scheme of Instruction
Department Of Physics OsmaniaUniversity Scheme of Instruction and Syllabus B.Sc Physics (I – VI Semesters) Under CBCS scheme (from the academic year 2016-2017) 1 B.Sc. PHYSICS SYLLABUS UNDER CBCS SCHEME SCHEME OF INSTRUCTION Semester Paper [ Theory and Practical ] Instructions Marks Credits Hrs/week I sem Paper – I : Mechanics 100 4 4 Practicals – I : Mechanics 3 50 1 II sem Paper – II: Waves and Oscillations 100 4 4 Practicals – II : Waves and Oscillations 3 50 1 III sem Paper – III : Thermodynamics 100 4 4 Practicals – III : Thermodynamics 3 50 1 IV sem Paper – IV : Optics 4 100 4 Practicals – IV :Optics 3 50 1 Paper –V : Electromagnetism 3 100 3 Practicals – V: Electromagnetism 3 50 1 V sem Paper – VI : Elective – I 100 3 Solid state physics/ 3 Quantum Mechanics and Applications Practicals – VI : Elective – I Practical 50 1 Solid state physics/ 3 Quantum Mechanics and Applications Paper – VII : Modern Physics 3 100 3 Practical – VII : Modern Physics Lab 3 50 1 VI sem Paper – VIII : Elective – II 100 3 Basic Electronics/ 3 Physics of Semiconductor Devices Practicals – VIII : Elective – II Practical 50 1 Basic Electronics/ 3 Physics of Semiconductor Devices Total Credits 36 2 B.Sc. (Physics)Semester I-Theory Syllabus 56hrs Paper – I:Mechanics (W.E.F the academic year 2016-2017) (CBCS) Unit – I 1. Vector Analysis (14) Scalar and vector fields, gradient of a scalar field and its physical significance.Divergence and curl of a vector field and related problems.Vector integration, line, surface and volume integrals.Stokes, Gauss and Greens theorems- simple applications. Unit – II 2. -

Determining Equilibrium Structures and Potential Energy Functions for Diatomic Molecules Robert J
Chapter 6 Determining Equilibrium Structures and Potential Energy Functions for Diatomic Molecules Robert J. Le Roy CONTENTS 1 6.0 Introduction 6.1 Quantum Mechanics of Vibration and Rotation 6.2 Semiclassical Methods 6.2.1 The semiclassical quantization condition 6.2.2 The Rydberg-Klein-Rees (RKR) inversion procedure 6.2.3 Near-dissociation theory (NDT) 6.2.4 Conclusions regarding semiclassical methods 6.3 Quantum-Mechanical Direct-Potential-Fit Methods 6.3.1 Overview and background 6.3.2 Potential function forms 6.3.2 A Polynomial Potential Function Forms 6.3.2 B The Expanded Morse Oscillator (EMO) Potential Form and the Importance of the Definition of the Expansion Variable 6.3.2 C The Morse/Long-Range (MLR) Potential Form 6.3.2 D The Spline-Pointwise Potential Form 6.3.3 Initial trial parameters for direct potential fits 6.4 Born-Oppenheimer Breakdown Effects 6.5 Concluding Remarks Appendix: What terms contribute to a long-range potential? Exercises References Because the Hamiltonian governing the vibration-rotation motion of diatomic molecules is essen- tially one dimensional, the theory is relatively tractable, and analyses of experimental data can be much more sophisticated than is possible for polyatomics. It is therefore possible to deter- mine equilibrium structures to very high precision – up to 10−6 A˚ – and often also to determine accurate potential energy functions spanning the whole potential energy well. The traditional way of doing this involves first determining the v-dependence of the vibrational level energies Gv and inertial rotational constants Bv, and then using a semiclassical inversion procedure to 1 Chapter 6, pp. -

Draft Recommendations on the New Electoral Arrangements for Halton Borough Council
Draft recommendations on the new electoral arrangements for Halton Borough Council Electoral review December 2018 Translations and other formats: To get this report in another language or in a large-print or Braille version, please contact the Local Government Boundary Commission for England at: Tel: 0330 500 1525 Email: [email protected] Licensing: The mapping in this report is based upon Ordnance Survey material with the permission of Ordnance Survey on behalf of the Keeper of Public Records © Crown copyright and database right. Unauthorised reproduction infringes Crown copyright and database right. Licence Number: GD 100049926 2018 Contents Introduction 1 Who we are and what we do 1 What is an electoral review? 1 Why Halton? 2 Our proposals for Halton 2 How will the recommendations affect you? 2 Have your say 3 Review timetable 3 Analysis and draft recommendations 5 Submissions received 5 Electorate figures 5 Number of councillors 6 Ward boundaries consultation 7 Draft recommendations 8 Runcorn central 10 Runcorn east 12 Runcorn west 15 Widnes east 17 Widnes north 19 Widnes west 21 Conclusions 23 Summary of electoral arrangements 23 Have your say 25 Equalities 27 Appendices 28 Appendix A 28 Draft recommendations for Halton Borough Council 28 Appendix B 30 Outline map 30 Appendix C 31 Submissions received 31 Appendix D 32 Glossary and abbreviations 32 Introduction Who we are and what we do 1 The Local Government Boundary Commission for England (LGBCE) is an independent body set up by Parliament.1 We are not part of government or any political party. We are accountable to Parliament through a committee of MPs chaired by the Speaker of the House of Commons. -

Thelwall Archaeological Assessment 2003
CHESHIRE HISTORIC TOWNS SURVEY Thelwall Archaeological Assessment 2003 CHESHIRE HISTORIC TOWNS SURVEY Thelwall Archaeological Assessment 2003 Environmental Planning Cheshire County Council Backford Hall Backford Chester CH1 6PZ These reports are the copyright of Cheshire County Council and English Heritage. The Ordnance Survey mapping within this document is provided by Cheshire County Council under licence from the Ordnance Survey, in order to fulfil its public function to make available Council held public domain information. The mapping is intended to illustrate the spatial changes that have occurred during the historical development of Cheshire towns. Persons viewing this mapping should contact Ordnance Survey copyright for advice where they wish to licence Ordnance Survey mapping/map data for their own use. The OS web site can be found at www.ordsvy.gov.uk Front cover : John Speed’s Map of Lancashire 1610 Lancashire County Council http://www.lancashire.gov.uk/environment/oldmap/index.asp THELWALL ARCHAEOLOGICAL ASSESSMENT Mike Shaw & Jo Clark 1. SUMMARY Strictly speaking Thelwall does not qualify, and never has qualified, as a town. However, it is included in the survey of Cheshire’s Historic Towns because it was the site of a ‘burh’ ( a defended centre) in the early 10th century. Such sites were often created as, or grew into, trading centres and are therefore important examples of early urbanism in Cheshire. The burh is the focus of this assessment, therefore only brief attention is paid to the medieval and post medieval settlement. 1.1 Topography and Geology Thelwall lies in northern Cheshire at around 15m AOD, on the fringes of Warrington whose centre lies 4km to the west. -

Runcorn History Research 1. Primary Sources A
RUNCORN HISTORY RESEARCH 1. PRIMARY SOURCES A. Parliamentary A. 1 Acts and Orders of Parliament Inclosure Halton or Moor Moss Act 1816 Runcorn Improvement Act 1852 Runcorn Commissioners Act 1893 Local Government Board Provisional Orders (Confirmation No. 8)Act 1895 Cheshire Constabulary 1852 Runcorn, Weston & Halton Waterworks Act 1865 Runcorn, Weston & Halton Waterworks (Capital) Act 1870 Runcorn District Water Board Act 1923 Runcorn & District Water Board Act 1962 Runcorn Gas Act 1847 Runcorn Gas Act 1885 Runcorn & Weston Lighting (draft) Order 1910 Runcorn Urban & Runcorn Rural Electric Light Order 1910 Electric Lighting Orders (Confirmation No. 1) Act 1910 Widnes and Runcorn Bridge Act 1900 Widnes and Runcorn Bridge(Transfer) Act 1911 Ministry of Health Provisional Orders (No.8) 13.5.1921 Provisional Order for Altering Widnes and Runcorn Bridge Act 1900 and Widnes and Runcorn Bridge (Transfer) Act 1911. 1921 Tramways (Temporary Increase of Charges) Act 1920 Cheshire & Lancashire County Councils (Runcorn – Widnes Bridge) Act 1947 Runcorn - Widnes Bridge Act 1955 Chester and Warrington Turnpike Act 1786 Runcorn and Northwich Turnpike Act 1818 Weston Point Light Railway, Order 1920 Upper Mersey Navigation Act 1876 Weaver Navigation Act 1720 Weaver Navigation Act 1760 Weaver Navigation Act 1807 Weaver Navigation Act 1840 Weaver Navigation Act 1866 Weaver Navigation Act 1928 Bridgewater Trust (ref. Weston Canal) Act 1857 The Bridgewater Canal (Waterloo Bridge) (Local Enactments) Order 1973 Manchester Ship Canal Act 1885 Manchester Ship