Silicon Wafer Integration of Ion Electrospray Thrusters Noah Wittel
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

The Evolving Launch Vehicle Market Supply and the Effect on Future NASA Missions
Presented at the 2007 ISPA/SCEA Joint Annual International Conference and Workshop - www.iceaaonline.com The Evolving Launch Vehicle Market Supply and the Effect on Future NASA Missions Presented at the 2007 ISPA/SCEA Joint International Conference & Workshop June 12-15, New Orleans, LA Bob Bitten, Debra Emmons, Claude Freaner 1 Presented at the 2007 ISPA/SCEA Joint Annual International Conference and Workshop - www.iceaaonline.com Abstract • The upcoming retirement of the Delta II family of launch vehicles leaves a performance gap between small expendable launch vehicles, such as the Pegasus and Taurus, and large vehicles, such as the Delta IV and Atlas V families • This performance gap may lead to a variety of progressions including – large satellites that utilize the full capability of the larger launch vehicles, – medium size satellites that would require dual manifesting on the larger vehicles or – smaller satellites missions that would require a large number of smaller launch vehicles • This paper offers some comparative costs of co-manifesting single- instrument missions on a Delta IV/Atlas V, versus placing several instruments on a larger bus and using a Delta IV/Atlas V, as well as considering smaller, single instrument missions launched on a Minotaur or Taurus • This paper presents the results of a parametric study investigating the cost- effectiveness of different alternatives and their effect on future NASA missions that fall into the Small Explorer (SMEX), Medium Explorer (MIDEX), Earth System Science Pathfinder (ESSP), Discovery, -

Photographs Written Historical and Descriptive
CAPE CANAVERAL AIR FORCE STATION, MISSILE ASSEMBLY HAER FL-8-B BUILDING AE HAER FL-8-B (John F. Kennedy Space Center, Hanger AE) Cape Canaveral Brevard County Florida PHOTOGRAPHS WRITTEN HISTORICAL AND DESCRIPTIVE DATA HISTORIC AMERICAN ENGINEERING RECORD SOUTHEAST REGIONAL OFFICE National Park Service U.S. Department of the Interior 100 Alabama St. NW Atlanta, GA 30303 HISTORIC AMERICAN ENGINEERING RECORD CAPE CANAVERAL AIR FORCE STATION, MISSILE ASSEMBLY BUILDING AE (Hangar AE) HAER NO. FL-8-B Location: Hangar Road, Cape Canaveral Air Force Station (CCAFS), Industrial Area, Brevard County, Florida. USGS Cape Canaveral, Florida, Quadrangle. Universal Transverse Mercator Coordinates: E 540610 N 3151547, Zone 17, NAD 1983. Date of Construction: 1959 Present Owner: National Aeronautics and Space Administration (NASA) Present Use: Home to NASA’s Launch Services Program (LSP) and the Launch Vehicle Data Center (LVDC). The LVDC allows engineers to monitor telemetry data during unmanned rocket launches. Significance: Missile Assembly Building AE, commonly called Hangar AE, is nationally significant as the telemetry station for NASA KSC’s unmanned Expendable Launch Vehicle (ELV) program. Since 1961, the building has been the principal facility for monitoring telemetry communications data during ELV launches and until 1995 it processed scientifically significant ELV satellite payloads. Still in operation, Hangar AE is essential to the continuing mission and success of NASA’s unmanned rocket launch program at KSC. It is eligible for listing on the National Register of Historic Places (NRHP) under Criterion A in the area of Space Exploration as Kennedy Space Center’s (KSC) original Mission Control Center for its program of unmanned launch missions and under Criterion C as a contributing resource in the CCAFS Industrial Area Historic District. -

Kicksat: a Crowd-Funded Mission to Demonstrate the World’S Smallest Spacecraft
SSC13-IX-5 KickSat: A Crowd-Funded Mission To Demonstrate The World’s Smallest Spacecraft Zachary Manchester, Mason Peck Cornell University Upson Hall, Ithaca, NY 14853; 607-279-1358 [email protected] Andrew Filo 4Special Projects 22670 Oakcrest Ct, Cupertino, CA 95014; 650-940-1677 [email protected] ABSTRACT Thanks to rapid advances made in the semiconductor industry, it is now possible to integrate most of the features of a traditional spacecraft onto a chip-scale device. The Sprite ChipSat, in development at Cornell since 2008, is an example of such a device. The KickSat mission, scheduled for launch in late 2013, will deploy 128 Sprites in low Earth orbit to test their survivability and demonstrate their code division multiple access (CDMA) communication system. The Sprites are expected to remain in orbit for several days while downlinking telemetry to ground stations before reentry. KickSat has been partially funded by over 300 backers through the crowd-funding website Kickstarter. Reference designs for the Sprites, along with a low-cost ground station receiver, are being made available under an open-source license. INTRODUCTION By dramatically reducing the cost and complexity of The rapid miniaturization of commercial-off-the-shelf building and launching a spacecraft, ChipSats could also help expand access to space for students and (COTS) electronics, driven in recent years by the hobbyists. In the near future, it will be possible for a emergence of smart phones, has made many of the high school science class, amateur radio club, or components used in spacecraft available in very small, motivated hobbyist to choose sensors, assemble a low-cost, low-power packages. -

Status of Chips: a Nasa University Explorer Astronomy Mission
SSC00-V-6 STATUS OF CHIPS: A NASA UNIVERSITY EXPLORER ASTRONOMY MISSION Will Marchant Space Sciences Laboratory - University of California, Berkeley 7962 Leeds Manor Road Marshall, VA 20115-2624 [email protected] Phone: (540) 347-1461 Fax: (954) 301-5786 Dr. Ellen Riddle Taylor DesignNet Engineering Group 275 Liberty Street, #6 San Francisco, CA 94114 [email protected] Phone: (510) 643-4054 Abstract. In the age of "Faster, Better, Cheaper", NASA's Goddard Space Flight Center has been looking for a way to implement university based world class science missions for significantly less money. The University Explorer (UNEX) program is the result. UNEX missions are designed for rapid turnaround with fixed budgets in the $10 million US dollar range. The CHIPS project was selected in 1998. The CHIPS mission has passed the Concept Study and will be having the Confirmation Review in August 2000. Many lessons have already been learned from the CHIPS UNEX project. This paper will discuss the early issues surrounding the use of commercial satellite constellations as the bus and the politics of small satellites using foreign launchers. The difficulties of finding a spacecraft in the UNEX price range will be highlighted. The advantages of utilizing Internet technologies from the earliest phases of the project through to communications with the spacecraft on orbit will be discussed. The current state of the program will be summarized and the project's plans for the future will be charted. What Is UNEX the constraints UNEX program, will provide spectral sky maps of the scientifically critical but The University-Class Explorer (UNEX) program virtually unexplored extreme ultraviolet (EUV) is funded by NASA with the goal of demonstrating band between 90 and 260 Å. -

Chips: a Nasa University Explorer Astronomy Mission
SSC03-V-3 CHIPS: A NASA UNIVERSITY EXPLORER ASTRONOMY MISSION Ellen Taylor DesignNet Engineering Group San Francisco, CA 94114 Mark Hurwitz, Will Marchant, Michael Sholl Space Sciences Laboratory - University of California, Berkeley Berkeley, CA 94720-7450 Simon Dawson, Jeff Janicik, Jonathan Wolff SpaceDev, Inc Poway, CA 92064 Abstract. On January 12th, 2003, the Cosmic Hot Interstellar Plasma Spectrometer Spacecraft (CHIPSat) launched successfully from Vandenberg Air Force Base as a secondary payload on a Delta II booster. CHIPSat completed commissioning in February 2003, and is now a fully operational observatory. The main science objective is to measure extreme ultraviolet emissions from the interstellar medium. Data on the distribution and intensity of these emissions allow scientists to test competing theories on the formation of hot interstellar gas clouds surrounding our solar system. CHIPSat is the first satellite in NASA's University-class Explorers Program (UNEX) to make it to orbit. The UNEX program was conceived by NASA as a new class of explorer mission charged with demonstrating that significant science and/or technology experiments can be performed with small satellites, constrained budgets and limited schedules. This paper presents the CHIPSat design, discusses the on-orbit performance to date, and provides lessons learned throughout the project. Introduction regions of particular interest long enough to provide the signal to noise ratio (S/N) detection The Cosmic Hot Interstellar Plasma required for the strongest emission lines. Many Spectrometer spacecraft (CHIPSat), the first of of these regions, at the galactic pole, have been NASA's streamlined University-Class Explorer observed to a depth of about 300,000 seconds missions, was launched out of Vandenberg Air per resolution element (resel). -

Financial Operational Losses in Space Launch
UNIVERSITY OF OKLAHOMA GRADUATE COLLEGE FINANCIAL OPERATIONAL LOSSES IN SPACE LAUNCH A DISSERTATION SUBMITTED TO THE GRADUATE FACULTY in partial fulfillment of the requirements for the Degree of DOCTOR OF PHILOSOPHY By TOM ROBERT BOONE, IV Norman, Oklahoma 2017 FINANCIAL OPERATIONAL LOSSES IN SPACE LAUNCH A DISSERTATION APPROVED FOR THE SCHOOL OF AEROSPACE AND MECHANICAL ENGINEERING BY Dr. David Miller, Chair Dr. Alfred Striz Dr. Peter Attar Dr. Zahed Siddique Dr. Mukremin Kilic c Copyright by TOM ROBERT BOONE, IV 2017 All rights reserved. \For which of you, intending to build a tower, sitteth not down first, and counteth the cost, whether he have sufficient to finish it?" Luke 14:28, KJV Contents 1 Introduction1 1.1 Overview of Operational Losses...................2 1.2 Structure of Dissertation.......................4 2 Literature Review9 3 Payload Trends 17 4 Launch Vehicle Trends 28 5 Capability of Launch Vehicles 40 6 Wastage of Launch Vehicle Capacity 49 7 Optimal Usage of Launch Vehicles 59 8 Optimal Arrangement of Payloads 75 9 Risk of Multiple Payload Launches 95 10 Conclusions 101 10.1 Review of Dissertation........................ 101 10.2 Future Work.............................. 106 Bibliography 108 A Payload Database 114 B Launch Vehicle Database 157 iv List of Figures 3.1 Payloads By Orbit, 2000-2013.................... 20 3.2 Payload Mass By Orbit, 2000-2013................. 21 3.3 Number of Payloads of Mass, 2000-2013.............. 21 3.4 Total Mass of Payloads in kg by Individual Mass, 2000-2013... 22 3.5 Number of LEO Payloads of Mass, 2000-2013........... 22 3.6 Number of GEO Payloads of Mass, 2000-2013.......... -

Changes to the Database for May 1, 2021 Release This Version of the Database Includes Launches Through April 30, 2021
Changes to the Database for May 1, 2021 Release This version of the Database includes launches through April 30, 2021. There are currently 4,084 active satellites in the database. The changes to this version of the database include: • The addition of 836 satellites • The deletion of 124 satellites • The addition of and corrections to some satellite data Satellites Deleted from Database for May 1, 2021 Release Quetzal-1 – 1998-057RK ChubuSat 1 – 2014-070C Lacrosse/Onyx 3 (USA 133) – 1997-064A TSUBAME – 2014-070E Diwata-1 – 1998-067HT GRIFEX – 2015-003D HaloSat – 1998-067NX Tianwang 1C – 2015-051B UiTMSAT-1 – 1998-067PD Fox-1A – 2015-058D Maya-1 -- 1998-067PE ChubuSat 2 – 2016-012B Tanyusha No. 3 – 1998-067PJ ChubuSat 3 – 2016-012C Tanyusha No. 4 – 1998-067PK AIST-2D – 2016-026B Catsat-2 -- 1998-067PV ÑuSat-1 – 2016-033B Delphini – 1998-067PW ÑuSat-2 – 2016-033C Catsat-1 – 1998-067PZ Dove 2p-6 – 2016-040H IOD-1 GEMS – 1998-067QK Dove 2p-10 – 2016-040P SWIATOWID – 1998-067QM Dove 2p-12 – 2016-040R NARSSCUBE-1 – 1998-067QX Beesat-4 – 2016-040W TechEdSat-10 – 1998-067RQ Dove 3p-51 – 2017-008E Radsat-U – 1998-067RF Dove 3p-79 – 2017-008AN ABS-7 – 1999-046A Dove 3p-86 – 2017-008AP Nimiq-2 – 2002-062A Dove 3p-35 – 2017-008AT DirecTV-7S – 2004-016A Dove 3p-68 – 2017-008BH Apstar-6 – 2005-012A Dove 3p-14 – 2017-008BS Sinah-1 – 2005-043D Dove 3p-20 – 2017-008C MTSAT-2 – 2006-004A Dove 3p-77 – 2017-008CF INSAT-4CR – 2007-037A Dove 3p-47 – 2017-008CN Yubileiny – 2008-025A Dove 3p-81 – 2017-008CZ AIST-2 – 2013-015D Dove 3p-87 – 2017-008DA Yaogan-18 -
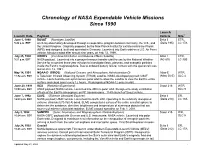
Chronology of NASA Expendable Vehicle Missions Since 1990
Chronology of NASA Expendable Vehicle Missions Since 1990 Launch Launch Date Payload Vehicle Site1 June 1, 1990 ROSAT (Roentgen Satellite) Delta II ETR, 5:48 p.m. EDT An X-ray observatory developed through a cooperative program between Germany, the U.S., and (Delta 195) LC 17A the United Kingdom. Originally proposed by the Max-Planck-Institut für extraterrestrische Physik (MPE) and designed, built and operated in Germany. Launched into Earth orbit on a U.S. Air Force vehicle. Mission ended after almost nine years, on Feb. 12, 1999. July 25, 1990 CRRES (Combined Radiation and Release Effects Satellite) Atlas I ETR, 3:21 p.m. EDT NASA payload. Launched into a geosynchronous transfer orbit for use by the National Weather (AC-69) LC 36B Service for a nominal three-year mission to investigate fields, plasmas, and energetic particles inside the Earth's magnetosphere. Due to onboard battery failure, contact with the spacecraft was lost on Oct. 12, 1991. May 14, 1991 NOAA-D (TIROS) (National Oceanic and Atmospheric Administration-D) Atlas-E WTR, 11:52 a.m. EDT A Television Infrared Observing System (TIROS) satellite. NASA-developed payload; USAF (Atlas 50-E) SLC 4 vehicle. Launched into sun-synchronous polar orbit to allow the satellite to view the Earth's entire surface and cloud cover every 12 hours. Redesignated NOAA-12 once in orbit. June 29, 1991 REX (Radiation Experiment) Scout 216 WTR, 10:00 a.m. EDT USAF payload; NASA vehicle. Launched into 450 nm polar orbit. Designed to study scintillation SLC 5 effects of the Earth's atmosphere on RF transmissions. -

System Integration Schedule Estimating Relationships (Sers)
NASA Cost and Schedule Symposium August 13-15, 2019 • Houston, TX System Integration Schedule Estimating Relationships (SERs) Presented by: Marc Greenberg Strategic Investment Division (SID) National Aeronautics and Space Administration Outline • Task Objectives • Background • Schedule Data from SMART • Methodology – Equation 1: Y = 0.3617 X -0.568 – Equations 2a, 2b, 3a and 3b – “Knee in the Curve” for Equation 1 • Example for notional project – Apply equations 2a, 2b, 3a and 3b – Sensitivity analysis • Conclusions and Future Work Slide 2 Task Objectives a • Estimate “ideal” (Design Sched.)/(Sys. I&T Sched.) ratio • Create schedule estimating relationships (SERs) to predict the following durations: – SRR (System Readiness Review) to CDR (Critical Design Review) – SIR (System Integration Review) to LRD (Launch Readiness Date) – SRR to LRD (i.e., total schedule less time from ATP b to SRR) • Demonstrate how these SERs could be used in practice • Discuss use of sensitivity analysis. (a) Schedule data was readily available so no data collection effort was required. (b) ATP: Authority to Proceed Slide 3 Background: Milestones from SRR to LRD Phase A-B Phase D-E System Level SRR LRD System Level Design Requirements Subsystems Element Item Level SIR Component Design Requirements PDR CDR Phase C All Design Requirements Complete Major Milestones: SRR: Systems Readiness Review PDR: Preliminary Design Review CDR: Critical Design Review SIR: System Integration Review LRD: Launch Readiness Date Slide 4 Schedule Data from SMART NASA’s Schedule Management -

Norton-SSC13-VI-2.Pdf
SSC13-VI-2 Findings of the KECK Institute for Space Studies Program on Small Satellites: A Revolution in Space Science Charles D. Norton Jet Propulsion Laboratory, California Institute of Technology 4800 Oak Grove Drive, Pasadena, CA 91109-8099; (818) 393-3920 [email protected] Sergio Pellegrino California Institute of Technology Pasadena, CA 91125; (626) 395-4764 [email protected] Michael Johnson JA 1 Cannons Road, Bristol, United Kingdom; (117) 230 2060 [email protected] ABSTRACT The Keck Institute for Space Studies (KISS) is a "think and do tank" established at Caltech where a small group of not more than 30 persons interact for a few days to explore various frontier topics in space studies. The primary purpose of KISS is to develop new planetary, Earth, and astrophysics space mission concepts and technology by bringing together a broad spectrum of scientists and engineers for sustained scientific and technical interaction. In July and October of 2012 a study program, with 30 participants from 14 institutions throughout academia, government, and industry, was held on the unique role small satellites can play to revolutionize scientific observations in space science from LEO to deep space. The first workshop identified novel mission concepts where stand-alone, constellation, and fractionated small satellite systems can enable new targeted space science discoveries in heliophysics, astrophysics, and planetary science including NEOs and small bodies. The second workshop then identified the technology advances necessary to enable these missions in the future. In the following we review the outcome of this study program as well as the set of recommendations identified to enable these new classes of missions and technologies. -

Final KISS ISM Report
SCIENCE AND ENABLING TECHNOLOGIES FOR THE EXPLORATION OF THE INTERSTELLAR MEDIUM Image Credit: Charles Carter / Keck Institute for Space Studies Study report prepared for the Keck Institute for Space Studies Opening workshop: September 8–11, 2014 Web-link: http://www.kiss.caltech.edu/study/science/index.html Closing workshop: January 13–15, 2015 Web-link: http://www.kiss.caltech.edu/study/scienceII/index.html Study Co-leads: Edward Stone (Caltech), Leon Alkalai (JPL), Louis Friedman (The Planetary Society) Study Members: Nitin Arora (JPL), Manan Arya (Caltech), Nathan Barnes (L. Garde Inc.), Travis Brashears (UC Santa Barbara), Mike Brown (Caltech), Paul Wilson Cauley (Wesleyan University), Robert J. Cesarone (JPL), Freeman Dyson (Institute for Advanced Study), Darren Garber (NXTRAC), Paul Goldsmith (JPL), Mae Jemison (100 Year Starship), Les Johnson (NASA-MSFC), Paulett Liewer (JPL), Philip Lubin (UC Santa Barbara), Claudio Maccone (IAA), Jared Males (University of Arizona), Kyle McDonough (UC Santa Barbara), Ralph L. McNutt, Jr. (JHU/APL), Richard Mewaldt (Caltech), Adam Michael (Boston University), Edward Montgomery (Space and Missile Defense Command), Merav Opher (Boston University), Elena Provornikova (Catholic University of America), Jamie Rankin (Caltech), Seth Redfield (Wesleyan University), Michael Shao (JPL), Robert Shotwell (JPL), Nathan Strange (JPL), Thomas Svitek (Stellar Exploration, Inc.), Mark Swain (JPL), Slava Turyshev (JPL), Michael Werner (JPL), Gary Zank (University of Alabama) i Participants in the 2nd KISS Workshop on “The Science and Enabling Technologies for the Exploration of the Interstellar Medium (ISM)” at the KISS facilities, California Institute of Technology, January 13-15, 2015. Workshop participants (some of the named participants below are not in the photo): Nitin Arora (JPL), Manan Arya (Caltech), Nathan Barnes (L. -

Quickcost 6.0
QuickCost 6.0 Introduction and Overview Dr. Joseph Hamaker & Ronald Larson Galorath Federal NASA Cost Symposium 2015 Ames Research Center 25-27 August 2015 Background • QuickCost is a top level parametric cost model • Initially developed beginning in 2001 (by Hamaker) while with the CAD at NASA HQ • Updated and evolved while with SAIC and TMGI up through Version 5.0 • Version 6.0 is a update to be completed by December 31, 2015 (midnight) QuickCost 1.0 QuickCost 2.0 QuickCost 3.0 QuickCost 4.0 QuickCost 5.0 Dissertation Proposal Dissertation In Work Dissertation Final CAD Funded 2009 CAD Funded 2010 Release date October 1, 2004 December 1, 2005 February 1, 2006 September 1, 2009 January 31, 2011 R2 adjusted 82.8% 77.0% 86.0% 88.4% 86.1% Number data points 122 131 120 120 132 Total Mass x x x x x Power x x x x Design life x x x x Year tech/ATP date x x x x Reqmts stability/volatility x Funding stability x Test x Number instruments x Pre-development study x Team x x Apogee x Percent new x x Bus new x Instrument new x Planetary/Destination x x x ECMPLX x MCMPLX x Data rate% x Instrument complexity% x x QuickCost Architecture • QuickCost is Microsoft Excel-based tool consisting of nine worksheets: Currently only these two worksheets Worksheet Tab Worksheet Content being updated Satellite DB Historical database Satellite Model Main satellite cost model Satellite Trades Model Expanded capability model Module & Transfer Vehicle DB Historical database Module & Transfer Vehicle Model Module and TV model X Vehicle DB Historical database X Vehicle Model X Vehicle Model Liquid Rocket Engine DB Historical database Liquid Rocket Engine Model LRE Model QuickCost Intended Use • QuickCost, throughout its history, has been meant to be used to estimate the cost and schedule (i.e.