Y ...Signature Redacted
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

The Design and Validation of Engine Intake Manifold Using Physical
International Journal of Automobile Engineering Research and Development (IJAuERD) ISSN (P): 2277–4785; ISSN (E): 2278–9413 Vol. 9, Issue 2, Dec 2019, 1–10 © TJPRC Pvt. Ltd. THE DESIGN AND VALIDATION OF ENGINE INTAKE MANIFOLD USING PHYSICAL EXPERIMENT AND CFD GURU DEEP SINGH, KESHAV KAUSHIK & PRADEEP KUMAR JAIN Department of Mechanical Engineering, Delhi Technological University, Main Bawana Road, New Delhi, India, ABSTRACT Race-car engineers aim to design an intake manifold which can maintain both low-end and top-end power without compromising the responsiveness of the engine throughout the power band. A major obstacle in achieving this goal is the rule requirement by FSAE for the mandatory presence of air intake restrictor which limits top-end power. In this paper, the selection criteria for design parameters such as runner length, plenum volume and intake geometry have been discussed. The effect of runner length and plenum volume on throttle response and manifold pressure has been studied through a physical exp. on a prototype variable geometry intake manifold. CFD simulations have been performed on ANSYS CFX to optimize the geometry for venturi and plenum. The geometry for which there was minimum pressure loss and maximum mass flow rate was chosen in the final design. The adopted approach was Original Article Article Original validated by conducting the same exp. on the designed intake manifold. KEYWORDS: Air Intake Manifold, CFD, FSAE, Engine, Converging- Diverging Nozzle & Variable Length Intake Manifold Received: Jun 13, 2019; Accepted: Jul 04, 2019; Published: Jul 22, 2019; Paper Id.: IJAuERDDEC20191 1. INTRODUCTION FSAE is the largest engineering design competition in the world which gives students an opportunity to design and manufacture a race pertaining to a series of rules whose purpose is both to ensure on-site event operations and promote clever problem solving. -
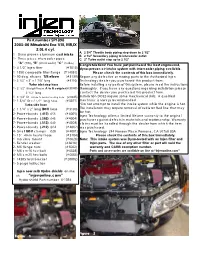
Installation Instructions
Part number SP1898 2003-06 Mitsubishi Evo VIII, MR,IX 2.0L 4 cyl. A. 2 3/4” Throttle body piping step down to 2 1/2” 1- Dyno-proven aluminum cast intake B. 2 1/2” Secondary piping to intercooler outlet 1- Three piece intercooler pipes C. 2” Turbo outlet step up to 2 1/2” “A” (T/B), “B” (intercooler) “C” (turbo) Congratulations! You have just purchased the best engineered, 1- 4 1/2” Injen filter (#1018) dyno-proven air intake system with intercooler piping available. 1- 1890 composite filter flange (#14031) Please check the contents of this box immediately. 1- 90 deg. silicone T/B elbow (#3139) Report any defective or missing parts to the Authorized Injen 1- 2 1/2” x 3” x 1 7/8” long (#3110) Technology dealer you purchased this product from. Turbo inlet step hose Before installing any parts of this system, please read the instructions 1- 2 1/2” straight hose A to B coupler(#3048) thoroughly. If you have any questions regarding installation please 2 1/2” long contact the dealer you purchased this product from. 1- 3 1/4” ID intake to sensor housing hose (#3045) Installation DOES require some mechanical skills. A qualified 1- 1 3/4” ID x 2 1/2” long hose (#3071) mechanic is always recommended. Turbo side hose *Do not attempt to install the intake system while the engine is hot. 2- 1 1/4” x 2” long BOV hose (#3100) The installation may require removal of radiator fluid line that may be hot. -

Matching of Internal Combustion Engine
CRANFIELD UNIVERSITY BAPTISTE BONNET MATCHING OF INTERNAL COMBUSTION ENGINE CHARACTERISTICS FOR CONTINUOUSLY VARIABLE TRANSMISSIONS SCHOOL OF ENGINEERING PHD THESIS CRANFIELD UNIVERSITY SCHOOL OF ENGINEERING, AUTOMOTIVE DEPARTMENT PHD THESIS BAPTISTE BONNET MATCHING OF INTERNAL COMBUSTION ENGINE CHARACTERISTICS FOR CONTINUOUSLY VARIABLE TRANSMISSIONS SUPERVISOR: PROF. NICHOLAS VAUGHAN 2007 This thesis is submitted in partial fulfilment of the requirements for the Degree of Doctor in Philosophy. © Cranfield University, 2007. All rights reserved. No part of this publication may be reproduced without the written permission of the copyright holder . PhD Thesis Abstract ABSTRACT This work proposes to match the engine characteristics to the requirements of the Continuously Variable Transmission [CVT] powertrain. The normal process is to pair the transmission to the engine and modify its calibration without considering the full potential to modify the engine. On the one hand continuously variable transmissions offer the possibility to operate the engine closer to its best efficiency. They benefit from the high versatility of the effective speed ratio between the wheel and the engine to match a driver requested power. On the other hand, this concept demands slightly different qualities from the gasoline or diesel engine. For instance, a torque margin is necessary in most cases to allow for engine speed controllability and transients often involve speed and torque together. The necessity for an appropriate engine matching approach to the CVT powertrain is justified in this thesis and supported by a survey of the current engineering trends with particular emphasis on CVT prospects. The trends towards a more integrated powertrain control system are highlighted, as well as the requirements on the engine behaviour itself. -

403D-11 Industrial Open Power Unit
403D-11 Industrial Open Power Unit 13.7-21 kW (18.4-28.2 hp) @ 2800-3000 rpm EU Stage IIIA/U.S. EPA Tier 4 Interim equivalent The Perkins 400 Series is an extensive family of engines in the 0.5-2.2 litre range. The 3 cylinder 403-11 model is one of Perkins smallest engines, combining performance, low operating costs and an ultra-compact package. From a packaging point of view, the 403-11 is the ideal engine for small industrial applications. Its simple, robust mechanical fuel system makes it easy to install and maintain. A powerful but quiet 1.1 litre engine complete with radiator cooled unit. Designed to meet EU Stage IIIA/U.S. EPA Tier 4 Interim equivalent emission standards. Specifications Power Rating Minimum power 15.1 kW 20.2 hp Maximum power 18.1 kW 24.3 hp Rated speed 2800-3000 rpm Maximum torque 64.6 Nm @ 2100 rpm 47.6 lb-ft @ 2100 rpm Emission Standards Emissions U.S. EPA Tier 4 Interim equivalent. Less than 19 kW, EU certification not required. General Number of cylinders 3 inline Bore 77 mm 3 in Stroke 81 mm 3.2 in Displacement 1.1 litres 69 cubic in Aspiration Naturally aspirated Cycle 4 stroke Compression ratio 22.7:1 Combustion system Indirect injection Rotation (from flywheel end) Anti-clockwise www.perkins.com Photographs are for illustrative purposes only and may not reflect final specification. All information is substantially correct at time of printing and may be altered subsequently. Final weights and dimensions will depend on completed specification. -
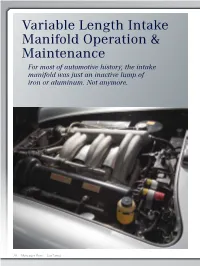
Variable Length Intake Manifold Operation & Maintenance
Variable Length Intake Manifold Operation & Maintenance For most of automotive history, the intake manifold was just an inactive lump of iron or aluminum. Not anymore. 28 Mercedes-Benz StarTuned The history of the air intake manifold had These offered an advantage beyond light weight been largely uneventful. For many decades, the in that they have better thermal properties. design remained pretty much the same with They can run much cooler than aluminum, sparse innovation. It was simply plumbing improving air charge density, which can be that made the air/fuel charge available to blended with additional fuel to produce more the combustion chambers willy-nilly with power. In addition, plastics can be molded into little thought devoted to how far each intake more complex shapes than the sand casting of valve was from the typical centrally-located aluminum allows. This gives greater flexibility carburetor. The simplest way to understand this during the engineering process. function is to think of the internal combustion engine as what it is: an air pump. Magnesium alloy is another innovation that is becoming popular in certain applications. As an engine piston moves down on the Magnesium parts have been around for maybe intake stroke, a vacuum occurs the strength a century, but recent advances in high-pressure of which depends on atmospheric pressure casting have made it a favorable material. The at that time and location. In a carbureted or advantages of magnesium are its light weight throttle-body injected engine, this atmospheric along with strength and rigidity. Good thermal pressure forces the air/fuel mixture through and acoustic properties are added benefits. -
PATROL COMBATANT MISSILE HYDROFOIL- DESIGN DEVELOPMENT and PRODUCTION- a BRIEF HISTORY by David S
PATROL COMBATANT MISSILE HYDROFOIL- DESIGN DEVELOPMENT AND PRODUCTION- A BRIEF HISTORY by David S. Oiling and Richard G. Merritt Boeing Marine Systems Published as Boeing Document 0312-80948-1, December 1980, and in the January-February issue of IIHigh-Speed Surface Craft," London ABOUT THE AUTHORS DAVID S. OLLING - Mechanical Specialist Engineer, PHM Variants Preliminary Design BS, Mechanical Engineering, University of Washington, 1967 With Boeing 21 years o 17 years in Advanced Marine Systems design, preliminary design, engineering liaison and testing organizations RICHARD G. MERRITT - Manager of PHM Variants Preliminary Design BS, Civil Engineering, Yale University, 1950 MS, Civil Engineering, California Institute of Technology, 1951 Degree of Civil Engineer, California Institute of Technology, 1953 Executive Program in Business Administration, Columbia University, 1967 With Boeing 17 years o 1 year as engineer with U.S. Naval Ordnance Test Station, Pasadena, before joining Boeing. o 6 years on airplane and missile system structural research. o 21 years in advanced marine system technology management, including supervision of hydrofoil technology staff, project design, and preliminary design groups. o Member of American Institute of Aeronautics and Astronautics, serving on AIAA technical committee on marine systems and technology. o Author of 12 articles in scientific and professional journals. PATROL COMBATANT MISSILE (HYDROFOIL) Design, Development and Production - A Brief History by David S. OUing and Richard G. Merritt, Boeing Marine Systems INTRODUCTION 1974. Its completion (PHM 2) was later incorporated into the production program, In 1972 three NATO navies formally agreed reference 3. to proceed with the joint development of a warship pro ject. The United States took the Major Events leadership before the "Memorandum of Understanding" was signed by the Federal Developing a new, sophisticated naval ship Republic of Germany and Italy and awarded system requires a considerable investment a letter contract to The Boeing Company of time, talent and money. -

The Wardroom Club and the Folks in New Orleans
7+(:$5'5220&/8% Monthly Newsletter Into Our Second Century · Organized 1899 · Boston, Massachusetts www.wardroomclub.org Board of Governors President ..........................................................................................CAPT Jules B. Selden, USMC (Ret) Vice President ................................................................................CAPT Randall D. Preston, USN (Ret) Secretary ...................................................................................CAPT Mary Jo Majors, NC, USNR (Ret) Treasurer .......................................................................................... CAPT Carl R. Mockler, USCG (Ret) Member-at-Large ...................................................................... MAJ Richard D. Brown, USMCR (Ret) Active Service Liaison ...........................................................................CAPT James B. Millican, USCG Immediate Past President ..............................................................CAPT Robert D. Holland, USN (Ret) Wine Steward .................................................................................................................... Mr. Reid Oslin Chaplain ............................................................................................ COL John W. Steiner, USAR (Ret) Assistant Secretary .........................................................................CDR Myles J. McCabe, USNR (Ret) Assistant Treasurer ...............................................................................Col David F. Wall, USMCR -

UNIT-1 COAL BASED THERMAL POWER PLANTS PART-A 1. What Are the Types of Power Plants?
ME6701 POWER PLANT ENGINEERING/ EEE DEPT/R SENTHI KUMAR VEL TECH HIGH TECH DR. RANGARAJAN DR.SAKUNTHALA ENGINEERING COLLEGE UNIT-1 COAL BASED THERMAL POWER PLANTS PART-A 1. What are the types of power plants? 1. Thermal Power Plant 2. Diesel Power Plant 3. Nuclear Power Plant 4. Hydel Power Plant 5. Steam Power Plant 6. Gas Power Plant 7. Wind Power Plant 8. Geo Thermal 9. Bio – Gas 10. M.H.D. Power Plant 2. What are the flow circuits of a thermal Power Plant? 1. Coal and ash circuits. 2. Air and Gas 3. Feed water and steam 4. Cooling and water circuits 3. List the different types of components (or) systems used in steam (or) thermal power plant? 1. Coal handling system. 2. Ash handling system. 3. Boiler 4. Prime mover 5. Draught system. a. Induced Draught b. Forced Draught 4.What are the merits of thermal power plants? 1.The unit capacity of thermal power plant is more. 2.The cost of unit decreases with the increase in unit capacity 3. Life of the plant is more (25-30 years) as compared to diesel plant (2-5 years) 4. Repair and maintenance cost is low when compared with diesel plant 5. Initial cost of the plant is less than nuclear plants 6. Suitable for varying load conditions. 5. What are the Demerits of thermal power plants? Demerits of thermal Power Plants: 1. Thermal plant are less efficient than diesel plants 2. Starting up the plant and brining into service takes more time 3. Cooling water required is more 4. -

Lm2500 High Pressure Turbine Blade Refurbishment
THE AMERICAN SOSETY OF MECHANICAL ENGINEERS 345 E. 47th St, Now York, N.Y. 10017 96-GT214 - ..0 The Society shall not be responsible for statements or opinions advanced In papers or discussion at meetings of the Society or of its Divisions or : Sections, or printed in its publications. Discussion Is printed only If the paper is published in an ASME Journal. Authorization to photocopy 0 material for internal or personal use under circumstance not falling within the fair use provisions of the Copyright Act is granted by ASME to libraries and other users registered with the Copyright Clearance Center (CCC) Transactional Reporting Service provided that the base fee of • $0.30 per page is paid directly to the CCC, 27 Congress Street, Salem MA 01970. Requests for special permission or bulk reproduction shoukf be ad- , dressed to the ASME Tedmical Pubrsleng Department Copyright C 1996 by ASME All Rights Reserved Printed In U.S.A.._ , LM2500 HIGH PRESSURE TURBINE BLADE REFURBISHMENT Downloaded from http://asmedigitalcollection.asme.org/GT/proceedings-pdf/GT1996/78736/V002T03A003/2406979/v002t03a003-96-gt-214.pdf by guest on 28 September 2021 1111111111I III VIII Matthew J. Driscoll Peter P. Descar Jr. Naval Surface Warfare Center Naval Surface Warfare Center Philadelphia, Pennsylvania Philadelphia, Pennsylvania Gerald B. Katz Walter E. Coward Naval Surface Warfare Center Naval Sea Systems Command Philadelphia, Pennsylvania Washington DC ABSTRACT were not segregated, their relevant historical data was lost when As a cost savings measure, aircraft engine users often have hot the blades were stored. Because these blades came from several section components reconditioned and re-installed during engine different ship classes, the lost information includes total operating rebuilds and overhauls. -

Maritime Irregular Warfare
CHILDREN AND FAMILIES The RAND Corporation is a nonprofit institution that EDUCATION AND THE ARTS helps improve policy and decisionmaking through ENERGY AND ENVIRONMENT research and analysis. HEALTH AND HEALTH CARE This electronic document was made available from INFRASTRUCTURE AND www.rand.org as a public service of the RAND TRANSPORTATION Corporation. INTERNATIONAL AFFAIRS LAW AND BUSINESS NATIONAL SECURITY Skip all front matter: Jump to Page 16 POPULATION AND AGING PUBLIC SAFETY SCIENCE AND TECHNOLOGY Support RAND Purchase this document TERRORISM AND HOMELAND SECURITY Browse Reports & Bookstore Make a charitable contribution For More Information Visit RAND at www.rand.org Explore the RAND National Defense Research Institute View document details Limited Electronic Distribution Rights This document and trademark(s) contained herein are protected by law as indicated in a notice appearing later in this work. This electronic representation of RAND intellectual property is provided for non-commercial use only. Unauthorized posting of RAND electronic documents to a non-RAND website is prohibited. RAND electronic documents are protected under copyright law. Permission is required from RAND to reproduce, or reuse in another form, any of our research documents for commercial use. For information on reprint and linking permissions, please see RAND Permissions. This product is part of the RAND Corporation monograph series. RAND monographs present major research findings that address the challenges facing the public and private sectors. All RAND mono- graphs undergo rigorous peer review to ensure high standards for research quality and objectivity. Characterizing and Exploring the Implications of MARITIME IRREGULAR WARFARE MOLLY DUNIGAN | DICK HOFFMANN PETER CHALK | BRIAN NICHIPORUK | PAUL DELUCA Prepared for the United States Navy Approved for public release; distribution unlimited NATIONAL DEFENSE RESEARCH INSTITUTE The research described in this report was prepared for the United States Navy. -

Coast Guard Base Boston 427 Commercial Street Boston, MA – the Function Hall
OCTOBER 2012 NEWSLETTER MEETING DATE: WEDNESDAY – 17 October 2012 LOCATION: Coast Guard Base Boston 427 Commercial Street Boston, MA – The Function Hall TIME: Social Hour from 1800 Dinner at 1900 PRICE: Members, Guests and Prospective Members of the Class of 2013 - $45.00 Walk-ins - $50.00 SPEAKER: Stephen P. Coonts “Flight of the Intruder” ENTRÉE: Roast Beef – Family Style MESSAGES FROM THE PRESIDENT Welcome to a new season, my friends! A lot of water has been flowing under the keel since last we met in May. As you can see from the masthead, I have been elected to serve as your new club president. To bring you up-to-date, I’d like to call a few items to your attention. First on the list will be the “new” Board of Governors. While several familiar names remain with us, I like to bring the members of the full 2012-2013 Board of Governors to your attention. They are: President - - - - - - - - - - - - - - - CAPT Robert D. Holland, USN (Ret) Vice President - - - - - - - - - - - CAPT Jules B. Selden, USMC (Ret) Secretary - - - - - - - - - - - - - - - CAPT Mary Jo Majors, NC, USNR (Ret) Treasurer - - - - - - - - - - - - - - - CAPT Randall D. Preston, USN (Ret) Member-at-Large - - - - - - - - - MAJ Richard D. Brown, USMCR (Ret) Active Service Liaison - - - - - - CAPT Timothy J. Heitsch, USCG Immediate Past President - - - CDR Robert J. Zemaitis, USNR (Ret) Wine Steward - - - - - - - - - - - - CDR Charles W. Collins, USNR (Ret) Chaplain - - - - - - - - - - - - - - - - CAPT George A. Ripsom, USNR (Ret) Assistant Secretary - - - - - - - - CDR Myles J. McCabe, USNR (Ret) Assistant Treasurer - - - - - - - - COL Charles L. Hyland, USAF (Ret) Historian - - - - - - - - - - - - - - - LCDR John H. Lok, USNR (Ret) Newsletter Editor - - - - - - - - LCDR David W. Graham, USNR (Ret) We welcome the “old-timers” and the “new recruits” to the current Board of Governors. -

การพัฒนาของเรือรบรุ่นใหม่ และเทคโนโลยีระบบบูรณาการ the Evolution of Warships and Integrated Systems Technology ตอนจบ นาวาเอก คำรณ พิสณฑ์ยุทธการ
บทความ การพัฒนาของเรือรบรุ่นใหม่ และเทคโนโลยีระบบบูรณาการ The Evolution of Warships and Integrated Systems Technology ตอนจบ นาวาเอก คำรณ พิสณฑ์ยุทธการ ารบูรณาการระบบต่าง ๆ ในเรือรบ ในขอบเขตจำกัดหรือสามารถฟื้นตัวกลับมารบได้ (Warship Integrated Systems) ในเวลาอันรวดเร็ว โดยพัฒนาทั้งในรูปแบบของการ กตามที่ได้กล่าวไปแล้วว่า การบูรณาการระบบต่าง ๆ พัฒนารูปร่างของเรือ (Shape) และภาพเงาร่าง บนเรือ มีจุดมุ่งหมายที่จะให้เกิดความมีประสิทธิภาพ (Signature) ของเรือ ระบบบูรณาการที่มีการนำมา ในการทำการรบทั้งในทางรุกและทางรับ โดยเน้น ใช้บนเรือแล้วในปัจจุบัน ประกอบไปด้วยระบบต่าง ๆ การพัฒนาระบบแบบบูรณาการไปที่หลักการ ๒ ดังนี้ ประการ คือ การพัฒนาระบบบูรณาการด้านขีด การบูรณาการระบบสะพานเดินเรือ (Integrated ความสามารถในการรบทางเรือสมัยใหม่ (Modern Bridge System : IBS) Warfighting Capabilities) และการพัฒนาระบบ การบูรณาการระบบอำนวยการรบ (Integrated บูรณาการด้านความอยู่รอดของเรือ (Survivability) Combat Management System : ICMS) ซึ่งแบ่งเป็น การป้องกันการยิงถูกเรือ (Hit Avoidance) การบูรณาการระบบบริหารจัดการระบบ ตามขั้นตอนการรบแต่ละขั้นตอน ความทนทานต่อ เรือต่าง ๆ (Integrated Platform Management ความเสียหายของเรือ (Damage Tolerance) ให้อยู่ System : IPMS) นาวิกศาสตร์ ปีที่ ๙๔ ฉบับที่ ๑๑ พฤศจิกายน ๒๕๕๔ ๐17 การบูรณาการระบบสื่อสาร (Integrated เป็นระบบแรกของเรือที่มีการพัฒนาให้เป็นระบบ Communication System : ICS) บูรณาการขึ้น โดยการนำแผนที่เดินเรือมาทำงาน การบูรณาการระบบเสากระโดงเรือ (Integrated ร่วมกับเรดาร์ ไยโรและเครื่องวัดความเร็วเรือ (Log) Mast System : IMS) สะพานเดินเรือของเรือรบรุ่นเก่า ๆ เครื่องมือเดินเรือ การบูรณาการระบบขับเคลื่อนของเรือ (Combined เรดาร์เดินเรือ