1 Background
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Observation of Pc 3/5 Magnetic Pulsations Around the Cusp at Mid Altitude
1 OBSERVATION OF PC 3/5 MAGNETIC PULSATIONS AROUND THE CUSP AT MID ALTITUDE Liu Yonghua(1), Liu Ruiyuan(1), B. J. Fraser(2), S. T. Ables(2), Xu Zhonghua(1), Zhang Beichen(1), Shi Jiankui(3), Liu Zhenxing(3), Huang Dehong(1), Hu Zejun(1), Chen Zhuotian(1), Wang Xiao(3), Malcolm Dunlop(4), A. Balogh(5) (1) Polar Research Institute of China, 451 Jinqiao Rd., Shanghai 200136, P. R. CHINA, [email protected] (2) The University of Newcastle, University Drive, Callaghan NSW 2308, AUSTRALIA, [email protected] (3)The Center of Space Science & Applied Research, Chinese Academy of Science, Post Box8701, Beijing 100080, jkshi@@center.cssar.ac.cn (4) The Rutherford Appleton Laboratory, Chilton, DIDCOT, Oxfordshire, OX11 0QX, UK, [email protected] (5)Space and Atmospheric Physics Group, Imperial College, London, [email protected] ABSTRACT transmitted straightforwardly from solar wind to the ionosphere (Bolshakova & Troitskaia, 1984). So far most Since launched in year 2000 the Cluster mission has research work on such topic are on basis of observation passed the region around the cusp at mid-altitude (~6Re) at ground or/and data from satellite located in the for many times, where ULF wave activities are rich in. upstream of solar wind or in the magnetosheath. To my From 0800 to 1300UT on October 30 2002 the Cluster knowledge, few authors take a study based on the spacecrafts ran along an orbit of southern cusp- measurement at the mid-altitude of the cusp. It seems plasmasphere-northern cusp that provides an excellent reasonable to assume that such a measurement be a direct observation of ULF waves in dayside magnetosphere. -

Astronomy & Astrophysics a Hipparcos Study of the Hyades
A&A 367, 111–147 (2001) Astronomy DOI: 10.1051/0004-6361:20000410 & c ESO 2001 Astrophysics A Hipparcos study of the Hyades open cluster Improved colour-absolute magnitude and Hertzsprung{Russell diagrams J. H. J. de Bruijne, R. Hoogerwerf, and P. T. de Zeeuw Sterrewacht Leiden, Postbus 9513, 2300 RA Leiden, The Netherlands Received 13 June 2000 / Accepted 24 November 2000 Abstract. Hipparcos parallaxes fix distances to individual stars in the Hyades cluster with an accuracy of ∼6per- cent. We use the Hipparcos proper motions, which have a larger relative precision than the trigonometric paral- laxes, to derive ∼3 times more precise distance estimates, by assuming that all members share the same space motion. An investigation of the available kinematic data confirms that the Hyades velocity field does not contain significant structure in the form of rotation and/or shear, but is fully consistent with a common space motion plus a (one-dimensional) internal velocity dispersion of ∼0.30 km s−1. The improved parallaxes as a set are statistically consistent with the Hipparcos parallaxes. The maximum expected systematic error in the proper motion-based parallaxes for stars in the outer regions of the cluster (i.e., beyond ∼2 tidal radii ∼20 pc) is ∼<0.30 mas. The new parallaxes confirm that the Hipparcos measurements are correlated on small angular scales, consistent with the limits specified in the Hipparcos Catalogue, though with significantly smaller “amplitudes” than claimed by Narayanan & Gould. We use the Tycho–2 long time-baseline astrometric catalogue to derive a set of independent proper motion-based parallaxes for the Hipparcos members. -

Planned Yet Uncontrolled Re-Entries of the Cluster-Ii Spacecraft
PLANNED YET UNCONTROLLED RE-ENTRIES OF THE CLUSTER-II SPACECRAFT Stijn Lemmens(1), Klaus Merz(1), Quirin Funke(1) , Benoit Bonvoisin(2), Stefan Löhle(3), Henrik Simon(1) (1) European Space Agency, Space Debris Office, Robert-Bosch-Straße 5, 64293 Darmstadt, Germany, Email:[email protected] (2) European Space Agency, Materials & Processes Section, Keplerlaan 1, 2201 AZ Noordwijk, Netherlands (3) Universität Stuttgart, Institut für Raumfahrtsysteme, Pfaffenwaldring 29, 70569 Stuttgart, Germany ABSTRACT investigate the physical connection between the Sun and Earth. Flying in a tetrahedral formation, the four After an in-depth mission analysis review the European spacecraft collect detailed data on small-scale changes Space Agency’s (ESA) four Cluster II spacecraft in near-Earth space and the interaction between the performed manoeuvres during 2015 aimed at ensuring a charged particles of the solar wind and Earth's re-entry for all of them between 2024 and 2027. This atmosphere. In order to explore the magnetosphere was done to contain any debris from the re-entry event Cluster II spacecraft occupy HEOs with initial near- to southern latitudes and hence minimise the risk for polar with orbital period of 57 hours at a perigee altitude people on ground, which was enabled by the relative of 19 000 km and apogee altitude of 119 000 km. The stability of the orbit under third body perturbations. four spacecraft have a cylindrical shape completed by Small differences in the highly eccentric orbits of the four long flagpole antennas. The diameter of the four spacecraft will lead to various different spacecraft is 2.9 m with a height of 1.3 m. -
Rumba, Salsa, Smaba and Tango in the Magnetosphere
ESCOUBET 24-08-2001 13:29 Page 2 r bulletin 107 — august 2001 42 ESCOUBET 24-08-2001 13:29 Page 3 the cluster quartet’s first year in space Rumba, Salsa, Samba and Tango in the Magnetosphere - The Cluster Quartet’s First Year in Space C.P. Escoubet & M. Fehringer Solar System Division, Space Science Department, ESA Directorate of Scientific Programmes, Noordwijk, The Netherlands P. Bond Cranleigh, Surrey, United Kingdom Introduction Launch and commissioning phase Cluster is one of the two missions – the other When the first Soyuz blasted off from the being the Solar and Heliospheric Observatory Baikonur Cosmodrome on 16 July 2000, we (SOHO) – constituting the Solar Terrestrial knew that Cluster was well on the way to Science Programme (STSP), the first recovery from the previous launch setback. ‘Cornerstone’ of ESA’s Horizon 2000 However, it was not until the second launch on Programme. The Cluster mission was first 9 August 2000 and the proper injection of the proposed in November 1982 in response to an second pair of spacecraft into orbit that we ESA Call for Proposals for the next series of knew that the Cluster mission was truly back scientific missions. on track (Fig. 1). In fact, the experimenters said that they knew they had an ideal mission only The four Cluster spacecraft were successfully launched in pairs by after switching on their last instruments on the two Russian Soyuz rockets on 16 July and 9 August 2000. On 14 fourth spacecraft. August, the second pair joined the first pair in highly eccentric polar orbits, with an apogee of 19.6 Earth radii and a perigee of 4 Earth radii. -

Chapter 1 Introduction
Chapter 1 Introduction The magnetosheath lies between the bow shock and the magnetopause and is formed by the deflected, heated, and decelerated solar wind with a minor magnetospheric plasma component. The terrestrial magnetosheath field and flow structure have been extensively studied because they affect the transfer of mass, momentum, and energy between the solar wind and the Earth’s magnetosphere. When magnetic shear across the magnetopause is high and dayside reconnection is occurring, the coupling between the solar wind and the magnetosphere is substantially enhanced relative to periods when there is no reconnection [ Paschmann et al ., 1979; Sonnerup et al ., 1981]. The magnetosphere becomes energized leading to phenomena such as the aurora. When the terrestrial magnetosphere is closed, or when the solar wind dynamic pressure is sufficiently high, magnetic field lines pile up near the magnetopause forcing out the normally resident plasma leading to the formation of a plasma depletion layer. Because of the limited amount of available data, the Jovian magnetosheath has been less extensively studied than the Earth’s magnetosheath. Factors that control the size, shape, and rigidity of the magnetosheath are much different at Jupiter and the Earth. At Jupiter the solar wind dynamic pressure is down by more than an order of magnitude and the Alfvén Mach number is nearly double the mean values observed near Earth. Furthermore, at Jupiter the force balance at the magnetopause is not well approximated by balancing the contributions of the external solar wind dynamic pressure against the internal magnetic pressure. Magnetospheric energetic particles, thermal plasma, and dynamic pressure associated with the rapid rotation of Jupiter provide non-negligible contributions to the internal pressure [ Smith et al ., 1974]. -

ASTRONOMY and ASTROPHYSICS Seismology of Δ Scuti Stars in the Praesepe Cluster II
Astron. Astrophys. 338, 511–520 (1998) ASTRONOMY AND ASTROPHYSICS Seismology of δ Scuti stars in the Praesepe cluster II. Identification of radial modes and their associated stellar parameters M.M. Hernandez´ 1?,F.Perez´ Hernandez´ 1, E. Michel2, J.A. Belmonte1, M.J. Goupil2, and Y. Lebreton2 1 Instituto de Astrof´ısica de Canarias, E-38200 La Laguna, Tenerife, Spain 2 DASGAL, URA CNRS 335, Observatoire de Paris, F-92195 Meudon, France Received 5 January 1998 / Accepted 20 July 1998 Abstract. An analysis based on a comparison between obser- Several attempts have been made to obtain stellar informa- vations and stellar models has been carried out to identify radial tion from δ Scuti stars (e.g. Mangeney et al. 1991; Goupil et modes of oscillations in several multi-periodic δ Scuti stars of al. 1993; Perez´ Hernandez´ et al. 1995; Guzik & Bradley 1995). the Praesepe cluster (BU, BN, BW and BS Cnc). The assump- All have had to face the absence of the greater part of the the- tion that all the stars considered have common parameters, such oretical modes in the observed spectrum. Noise level, selection as metallicity, distance or age, is imposed as a constraint. Even mechanisms, geometrical effects and also mutual interference so, there is a large number of possible solutions, partially caused between very close modes (as recently illustrated by Belmonte by the rotational effects on the pulsation frequencies and on the et al. 1997) contribute towards explaining this phenomenon. stars’ positions in the HR diagram, which need to be parame- Even in the case of a large number of detected modes, such as terized. -
Ariane 501 Incident at Three Levels of Description
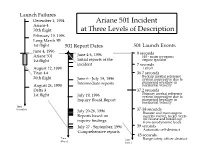
Launch Failures! December 1, 1994! Ariane 501 Incident " Ariane 4 ! 70th flight! at Three Levels of Description! February 19, 1996! Long March 3B ! 1st flight! 501 Report Dates! 501 Launch Events! June 4, 1996! 0 seconds! Ariane 501 ! June 4-6, 1996! H0 - main cryogenic ! 1st flight! Initial reports of the ! engine ignition! incident! 7 seconds! August 12, 1998! Liftoff! Titan 4A ! 36.7 seconds! Backup inertial reference ! 20th flight! June 6 - July 19, 1996! system inoperative due to ! Intermediate reports! numerical overflow in ! August 26, 1998! horizontal velocity! Delta 3 ! 37.2 seconds! Primary inertial reference ! 1st flight ! July 19, 1996! system inoperative due to ! Inquiry Board Report! numerical overflow in ! horizontal velocity! Time! (months)! 37-38 seconds! July 20-26, 1996! Booster and main engine ! Reports based on ! nozzles swivel, rocket veers ! off course and breaks up ! inquiry findings! from aerodynamic loads ! July 27 - September, 1996! 39 seconds! Automatic self-destruct ! Comprehensive reports ! 45 seconds! Time! Time! Range safety officer destruct ! (days)! (secs.)! “High Profit” Documents! Ariane 5 Flight 501 Failure: Report by the Inquiry Board (July 19, 1996)! Inertial Reference Software Error Blamed for Ariane 5 Failure; Defense !Daily (July 24, 1996) ! !!! Software Design Flaw Destroyed Ariane 5; next flight in 1997; ! !Aerospace Daily (July 24, 1996) ! !! Ariane 5 Rocket Faces More Delay; The Financial Times Limited ! !(July 24, 1996) ! Flying Blind: Inadequate Testing led to the Software Breakdown that !Doomed Ariane -

European Space Agency Announces Contest to Name the Cluster Quartet
European Space Agency Announces Contest to Name the Cluster Quartet. 1. Contest rules The European Space Agency (ESA) is launching a public competition to find the most suitable names for its four Cluster II space weather satellites. The quartet, which are currently known as flight models 5, 6, 7 and 8, are scheduled for launch from Baikonur Space Centre in Kazakhstan in June and July 2000. Professor Roger Bonnet, ESA Director of Science Programme, announced the competition for the first time to the European Delegations on the occasion of the Science Programme Committee (SPC) meeting held in Paris on 21-22 February 2000. The competition is open to people of all the ESA member states. Each entry should include a set of FOUR names (places, people, or things from his- tory, mythology, or fiction, but NOT living persons). Contestants should also describe in a few sentences why their chosen names would be appropriate for the four Cluster II satellites. The winners will be those which are considered most suitable and relevant for the Cluster II mission. The names must not have been used before on space missions by ESA, other space organizations or individual countries. One winning entry per country will be selected to go to the Finals of the competition. The prize for each national winner will be an invitation to attend the first Cluster II launch event in mid-June 2000 with their family (4 persons) in a 3-day trip (including excursions to tourist sites) to one of these ESA establishments: ESRIN (near Rome, Italy): winners from France, Ireland, United King- dom, Belgium. -

Cluster Ref: SCI-S-2019-001-CPE AO for Cluster Issue 1.0 Guest Investigator and Early Career Date 25 February 2019 Scientist Programme Page 1
Cluster Ref: SCI-S-2019-001-CPE AO for Cluster Issue 1.0 Guest Investigator and Early Career Date 25 February 2019 Scientist Programme Page 1 European Space Agency Directorate of Science Cluster ANNOUNCEMENT OF OPPORTUNITY for Guest Investigator and Early Career Scientist February 2019 Cluster Ref: SCI-S-2019-001-CPE AO for Cluster Issue 1.0 Guest Investigator and Early Career Date 25 February 2019 Scientist Programme Page 2 TABLE OF CONTENTS 1 Guest Investigator and Early Career Scientist Programme ..................................4 1.1 Purpose .......................................................................................................4 1.2 Scope ..........................................................................................................4 1.3 Proposal Information Package .....................................................................4 1.4 Eligibility....................................................................................................5 1.5 Privileges and Responsibilities of the selected Guest Investigator ...............5 1.6 Privileges and Responsibilities of the selected Early Career Scientist ..........5 1.7 Timetable....................................................................................................6 1.8 Letters of Intent ..........................................................................................6 1.9 Proposals ....................................................................................................6 1.9.1 Cover page ..........................................................................................7 -

Baseplate Variability of Vibrio Cholerae Chemoreceptor Arrays
Baseplate variability of Vibrio cholerae chemoreceptor arrays Wen Yanga,1, Alejandra Alvaradob,1, Timo Glatterc, Simon Ringgaardb,2, and Ariane Briegela,2 aInstitute of Biology, Leiden University, 2333 BE Leiden, The Netherlands; bDepartment of Ecophysiology, Max Plank Institute for Terrestrial Microbiology, 35043 Marburg, Germany; and cCore Facility for Mass Spectrometry and Proteomics, Max Planck Institute for Terrestrial Microbiology, 35043 Marburg, Germany Edited by John S. Parkinson, University of Utah, Salt Lake City, UT, and accepted by Editorial Board Member Caroline S. Harwood November 12, 2018 (received for review July 11, 2018) The chemoreceptor array, a remarkably ordered supramolecular these, clusters I and III are expressed only under certain growth complex, is composed of hexagonally packed trimers of receptor conditions (low oxygen and as a general stress response, respectively) dimers networked by a histidine kinase and one or more coupling (16–18). The proteins from cluster I form cytoplasmic arrays, in proteins. Even though the receptor packing is universal among which two baseplate layers sandwich cytosolic chemoreceptors and chemotactic bacteria and archaea, the array architecture has been are stabilized by a specialized receptor with two signaling domains extensively studied only in selected model organisms. Here, we (19, 20). Cluster III is structurally not well understood at present. show that even in the complete absence of the kinase, the cluster II Neither of these systems has been implicated in canonical che- arrays in Vibrio cholerae retain their native spatial localization and motactic behavior, and their cellular function remains elusive. In the iconic hexagonal packing of the receptors with 12-nm spacing. contrast, cluster II has been shown to be responsible for chemo- Our results demonstrate that the chemotaxis array is versatile in tactic behavior under all tested conditions so far (21). -

China Dream, Space Dream: China's Progress in Space Technologies and Implications for the United States
China Dream, Space Dream 中国梦,航天梦China’s Progress in Space Technologies and Implications for the United States A report prepared for the U.S.-China Economic and Security Review Commission Kevin Pollpeter Eric Anderson Jordan Wilson Fan Yang Acknowledgements: The authors would like to thank Dr. Patrick Besha and Dr. Scott Pace for reviewing a previous draft of this report. They would also like to thank Lynne Bush and Bret Silvis for their master editing skills. Of course, any errors or omissions are the fault of authors. Disclaimer: This research report was prepared at the request of the Commission to support its deliberations. Posting of the report to the Commission's website is intended to promote greater public understanding of the issues addressed by the Commission in its ongoing assessment of U.S.-China economic relations and their implications for U.S. security, as mandated by Public Law 106-398 and Public Law 108-7. However, it does not necessarily imply an endorsement by the Commission or any individual Commissioner of the views or conclusions expressed in this commissioned research report. CONTENTS Acronyms ......................................................................................................................................... i Executive Summary ....................................................................................................................... iii Introduction ................................................................................................................................... 1 -

Orbit Aspects of End-Of-Life Disposal from Highly Eccentric Orbits K. Merz(1)
Orbit Aspects of End-Of-Life Disposal from Highly Eccentric Orbits K. Merz(1)(2), H. Krag(1), S. Lemmens(1), Q. Funke(3), S. Böttger(4), D. Sieg(5), G. Ziegler(5), A. Vasconcelos(5), B. Sousa(1), H.-J. Volpp(6), R. Southworth(1) (1)ESA/ESOC, Robert-Bosch-Str. 5, 64293 Darmstadt, Germany, (2) ESA/ESOC, +49-6151-90-2990, [email protected] (3) IMS SPACE CONSULTANCY GMBH c/o ESA/ESOC, (4) Luleå University of Technology, Luleå, Sweden (5) SCISYS Deutschland GmbH c/o ESA/ESOC, (6) ESA/ESOC, retired Abstract: End-of-Life disposal options are well established for missions in the Low Earth Orbit (LEO) and Geostationary Orbit (GEO) regions and consist, respectively, of near circular graveyard orbits or atmospheric decay. Science missions such as ESA’s Integral and Cluster-II missions, however, sometimes operate on highly-eccentric Earth orbits (HEO) to achieve their mission goals, such as astronomical observations or measurements of the Earth's environment. The dominant perturbation forces on these orbits are typically caused by the gravity fields of Sun and Moon. This paper highlights ESA's investigations on orbit manoeuvres to change the long- term evolution and to finally influence the orbital lifetime, re-entry epoch, and re-entry location for the Cluster-II and Integral spacecraft. Manoeuvres, years before the end of the mission, to target a safe natural re-entry driven by third body perturbations several years after the end of mission, were analysed and implemented. The manoeuvre options considered are presented with a view to their cost in delta-v and therefore maximum post-manoeuvre operational lifetime and their effect on orbital lifetime and re-entry location.