Global Contour Lines Reconstruction in Topographic Maps Joachim Pouderoux, Salvatore Spinello
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Digital Terrain Model (Dtm) As a Tool for Landslide Investigation in the Polish Carpathians
5 STUDIA GEOMORPHOLOGICA CARPATHO-BALCANICA VOL. XLVI, 2012: 5–23 PL ISSN 0081-6434 DOI 10.2478/v10302-012-0001-3 MICHA£ D£UGOSZ (KRAKÓW) DIGITAL TERRAIN MODEL (DTM) AS A TOOL FOR LANDSLIDE INVESTIGATION IN THE POLISH CARPATHIANS Abstract. This paper present the possibilities of using digital terrain model in landslide investiga- tions in the Polish Flysch Carpathians. The analysis was based on results of SOPO project which was made in the £u¿na commune and on GIS interpretation of DTM model with topographical map. On the basis of the interpretation of a properly prepared DTM elevation model, 76 areas of potential occurrence of landslides in the £u¿na commune were defined. In 51 cases from among the 76 defined areas, the presence of landslides, within the selected unit, was confirmed during the field study. The interpretation of the digital terrain model in conjunction with a topographic map gave similar results. Areas of potential occurrence of landslides in both methods were practically identical (area of 600 ha). Despite the landslide area designated more accurately by the DTM, the analysis of topographic maps in conjunction with the DTM gave slightly better results, designating 11 more areas as places of land- slide occurrence. The digital terrain model (DTM), available for the area of the Polish Carpathians, can be useful in the study of landslides. It depends on the type of landslides, type of relief and the degree of forest landcover. Key words: landslide, digital terrain model, GIS, the flysch Carpathians INTRODUCTION The high amount of precipitation, floods, and accompanying landslides that oc- curred in the basins of the Upper Vistula and the Oder in 1997, 2000, and 2001 aroused the interest of the state administration and local authorities on the problem of landslides in the Polish Carpathians. -

1 Geographical Information Systems (GIS)
Geographical Information Systems (GIS) Introduction Geographical Information System (GIS) is a technology that provides the means to collect and use geographic data to assist in the development of Agriculture. A digital map is generally of much greater value than the same map printed on a paper as the digital version can be combined with other sources of data for analyzing information with a graphical presentation. The GIS software makes it possible to synthesize large amounts of different data, combining different layers of information to manage and retrieve the data in a more useful manner. GIS provides a powerful means for agricultural scientists to better service to the farmers and farming community in answering their query and helping in a better decision making to implement planning activities for the development of agriculture. Overview of GIS A Geographical Information System (GIS) is a system for capturing, storing, analyzing and managing data and associated attributes, which are spatially referenced to the Earth. The geographical information system is also called as a geographic information system or geospatial information system. It is an information system capable of integrating, storing, editing, analyzing, sharing, and displaying geographically referenced information. In a more generic sense, GIS is a software tool that allows users to create interactive queries, analyze the spatial information, edit data, maps, and present the results of all these operations. GIS technology is becoming essential tool to combine various maps and remote sensing information to generate various models, which are used in real time environment. Geographical information system is the science utilizing the geographic concepts, applications and systems. -

Digital Elevation Model Quality Assessment Methods: a Critical Review
remote sensing Review Digital Elevation Model Quality Assessment Methods: A Critical Review Laurent Polidori 1,* and Mhamad El Hage 2 1 CESBIO, Université de Toulouse, CNES/CNRS/INRAE/IRD/UPS, 18 av. Edouard Belin, bpi 2801, 31401 Toulouse CEDEX 9, France 2 Laboratoire d’Etudes Géospatiales (LEG), Université Libanaise, Tripoli, Lebanon; [email protected] * Correspondence: [email protected] Received: 31 May 2020; Accepted: 23 October 2020; Published: 27 October 2020 Abstract: Digital elevation models (DEMs) are widely used in geoscience. The quality of a DEM is a primary requirement for many applications and is affected during the different processing steps, from the collection of elevations to the interpolation implemented for resampling, and it is locally influenced by the landcover and the terrain slope. The quality must meet the user’s requirements, which only make sense if the nominal terrain and the relevant resolution have been explicitly specified. The aim of this article is to review the main quality assessment methods, which may be separated into two approaches, namely, with or without reference data, called external and internal quality assessment, respectively. The errors and artifacts are described. The methods to detect and quantify them are reviewed and discussed. Different product levels are considered, i.e., from point cloud to grid surface model and to derived topographic features, as well as the case of global DEMs. Finally, the issue of DEM quality is considered from the producer and user perspectives. Keywords: digital elevation model; nominal terrain; quality; accuracy; error; autocorrelation; landforms 1. Introduction Terrestrial relief is essential information to represent on a map. -
DEM) from SPOT 4 Satellite Stereo-Pair Images for Wadi Watier - Sinai Peninsula, Egypt Moustafa El-Sammany1, Islam H
Creating a Digital Elevation Model (DEM) from SPOT 4 Satellite Stereo-Pair Images for Wadi Watier - Sinai Peninsula, Egypt Moustafa El-Sammany1, Islam H. Abou El-Magd2, El-Sayed A. Hermas2 1Water Resources Research Institute, National Water Research Center, Egypt. 2National Authority for Remote Sensing and Space Sciences, Egypt. Abstract Flash Floods are one of the most damaging and costly natural hazards in Egypt, particularly in Sinai Peninsula and the Eastern Desert. Therefore, hydrological modelling and hydrodynamic simulations, to understand and forecast flash flood events, are highly needed. Digital Elevation Model (DEM) is the key component in such hydrological and hydrodynamic modeling, which can be used to derive a wealth of information about the morphology and drainage network of a watershed. Unfortunately, limited precise geographical and topographical information in the form of high resolution DEMs, in developing countries, constrain such advanced hydrological and hydrodynamic modelling applications. This paper describes the strategy of extracting high resolution and accurate DEMs from SPOT 4 stereo-pair satellite images. The main objective of generating the DEM was for hydrological and hydrodynamic simulation models for flash flood forecasting and as a significant component of an early warning system. The research developed a methodology for generating 10 meter resolution DEM that was calibrated against accurate land survey measurements. Key words: DEM, SPOT Image, Flash Floods, Sinai Peninsula, Egypt. 1. INTRODUCTION Water resource management commonly requires investigation of landscape and hydrological features such as terrain slope, drainage networks, drainage divides, and catchment boundaries. Digital Elevation Model (DEM) is very useful for many of water related applications, more effectively when integrated with hydrologic and hydrodynamic models to analyze and forecast variable scenarios for the interaction between the water, its power and motion, and the surrounding environment. -

Geography 281 Map Making with GIS Project Three: Viewing Data Spatially
Geography 281 Map Making with GIS Project Three: Viewing Data Spatially This activity introduces three of the most common thematic maps: Choropleth maps Dot density maps Graduated symbol maps You will learn how, when and why to create each type along with some of the pitfalls to avoid when making them. Most of the work will take place within the Symbology tab of the Layer properties form in the ArcMap Data View. In ArcMap Layout View, you will learn how to Set Relative Paths Modify legend text The first part of the activity guides you though the steps and decisions needed to create a series of maps illustrating the spatial relationship between city population, state population and area in the lower 48 states. The On Your Own part lets you apply what you've learned to create a new map that combines information from two previous maps. The data needed for proj3 is located in the \\Geogsrv\data\geog281\proj3 directory. Project 3 files: Description: Feature Type: counties48 shapefile base map of US counties polygon us48_major_cities shapefile Major U.S. cities point us48_states shapefile base map of lower 48 states polygon Visual Variables Maps use symbols to portray data. By selecting the right type of symbol you can create an intuitive map that is easy to read. Choosing the wrong symbol can mislead and confuse the map reader. Depending on the data type (qualitative or quantitative) and the type of feature (point, line, or polygon) you are mapping, you have many choices with regards to selecting symbol color (hue and value), size, shape, and texture. -

Concepts Topographic Map Contour Lines
1/14 Concepts Highway Design Project WWhoho to stastart?rt? What are the steps? Highway Design Principals Amir Samimi Civil Engineering Department Sharif University of Technology 2/14 3/14 Topographic Map Contour Lines Contou r lin es ar e lin es th at co nnect po ints t hat a re o f t he sa me elevation. They show the exact elevation, the shape of the land, and the steepness of the land’s slope. Contour lines never touch or cross. A topographic map, also known as a contour map, is a map that shows the shape of the land using contour line. It is a map that shows and elevation field, meaning how high and low the ground is in relation to sea level. 4/14 5/14 What is a benchmark? What is a contour interval? A bebenchmarknchmark isis a popointint wwherehere eexactxact eelevationlevation iiss knknownown aandnd iiss A cocontourntour inintervalterval iiss tthehe ddifferenceifference in eelevationlevation betweebetweenn two marked with a brass or aluminum plate. It is marked BM on contour lines that are side by side. the map with the elevation numbers given in feet. Remember that a contour interval is not the distance between Benchmarks are useful to help determine contour lines. the two lines – to get the distance you need to use the map scale. 6/14 7/14 Close Together? Dark Colored Contour Lines If the co ntou r lin es ar e cl ose togethe r, t he n t hat ind icates t hat The da rk colo red co ntou r lines rep rese nt eve ry fift h co ntou r area has a steep slope. -

1-Meter Digital Elevation Model Specification
National Geospatial Program 1-Meter Digital Elevation Model Specification Chapter 7 of Section B, U.S. Geological Survey Standards, of Book 11, Collection and Delineation of Spatial Data Techniques and Methods 11–B7 U.S. Department of the Interior U.S. Geological Survey 1-Meter Digital Elevation Model Specification By Samantha T. Arundel, Christy-Ann M. Archuleta, Lori A. Phillips, Brittany L. Roche, and Eric W. Constance Chapter 7 of Section B, U.S. Geological Survey Standards Book 11, Collection and Delineation of Spatial Data National Geospatial Program Techniques and Methods 11–B7 U.S. Department of the Interior U.S. Geological Survey U.S. Department of the Interior SALLY JEWELL, Secretary U.S. Geological Survey Suzette M. Kimball, Acting Director U.S. Geological Survey, Reston, Virginia: 2015 For more information on the USGS—the Federal source for science about the Earth, its natural and living resources, natural hazards, and the environment—visit http://www.usgs.gov or call 1–888–ASK–USGS. For an overview of USGS information products, including maps, imagery, and publications, visit http://www.usgs.gov/pubprod/. Any use of trade, firm, or product names is for descriptive purposes only and does not imply endorsement by the U.S. Government. Although this information product, for the most part, is in the public domain, it also may contain copyrighted materials as noted in the text. Permission to reproduce copyrighted items must be secured from the copyright owner. Suggested citation: Arundel, S.T., Archuleta, C.M., Phillips, L.A., Roche, B.L., and Constance, E.W., 2015, 1-meter digital elevation model specification: U.S. -

Comparison of Digital Elevation Models for Aquatic Data Development
Comparison of Digital Elevation Models for Aquatic Data Development I Sharon Clarke and Kelly Burnett Abstract the DEMS (Jenson and Domingue, 1988; Jenson, 1991), which Thirty-meter digital elevation models (DEMS]produced by the improves the quality of stream-associated topographic infor- U.S. Geological Survey (USGS)are widely available and com- mation, such as channel gradient and valley floor width. Fur- monly used in analyzing aquatic systems. However, these thermore, streams created from DEMs always appear as single DEMS are of relutively coorse resolution, were inconsistently lines, rather than as braided channels or double-bank streams, produced (ie.,Level 3 versus kvel2 DEWS), and lock drainage and a single line represents water bodies such as lakes and enforcement. Such issues mny hamper gods to accurately reservoirs. Thus, it is easier to calculate stream order and route model &ems, delineate hydmlogic units (~s],and classi' stream networks; the latter is necessary prior to georeferencing slope. Thus, the Coostal Landscape Analysis and Modeling stream-associated data. Study (CLAMS) compared streams, HUS, and dope classes gen- We evaluated the usefulness of DEM data for our specific ercrted from sample 10-meter drainage-enforced {LIE) DEMS and applications throughout the range of landscape characteristics 30-meter DEMs. We found 111 at (1)drainage enforc~mentim- found in our study area, following the recommendation of proved the sputinl occuracy of streams and HU boun dories many authors that DEM evaluations need to be contextual more thm did increasing resolution from 30 meters to I 0 me- (Walsh et al., 1987; Weih and Smith, 1990; Shearer, 1991; ters, particuIariy in fitter terrain; (2)&-ems and HU bound- Carter, 1992, Robinson, 1994; Zhang and Montgomery, 1994). -
The National Map Seamless Digital Elevation Model Specifications
The National Map Seamless Digital Elevation Model Specifications Chapter 9 of Section B, U.S. Geological Survey Standards, of Book 11, Collection and Delineation of Spatial Data Techniques and Methods 11–B9 U.S. Department of the Interior U.S. Geological Survey Cover: Tahoe Basin Lidar Project—A view of the seamless digital elevation model (DEM) in the Desolation Wilderness of the Sierra Nevada mountain range, looking northeastward over Mount Ralston toward Mount Tallac and Lake Tahoe, shows the difference in feature crispness in the area derived from lidar (area north of blue line), as compared to the surrounding region. Note that the DEM itself does not vary in resolution across the image. The National Map Seamless Digital Elevation Model Specifications By Christy-Ann M. Archuleta, Eric W. Constance, Samantha T. Arundel, Amanda J. Lowe, Kimberly S. Mantey, and Lori A. Phillips Chapter 9 of Section B, U.S. Geological Survey Standards, of Book 11, Collection and Delineation of Spatial Data Techniques and Methods 11–B9 U.S. Department of the Interior U.S. Geological Survey U.S. Department of the Interior RYAN K. ZINKE, Secretary U.S. Geological Survey William H. Werkheiser, Acting Director U.S. Geological Survey, Reston, Virginia: 2017 For more information on the USGS—the Federal source for science about the Earth, its natural and living resources, natural hazards, and the environment—visit https://www.usgs.gov or call 1–888–ASK–USGS. For an overview of USGS information products, including maps, imagery, and publications, visit https://store.usgs.gov/. Any use of trade, firm, or product names is for descriptive purposes only and does not imply endorsement by the U.S. -

Tutorial 3 - Map Symbology in Arcgis
GEOG 245: Geographic Information Systems Lab 03 Tutorial 3 - Map Symbology in ArcGIS Introduction ArcGIS provides many ways to display and analyze map features. Although not specifically a map-making or cartographic program, ArcGIS does feature a wide range of cartographic functions and symbology. Remember that the use of appropriate map symbology (points, lines, area fills, color, etc.) and map design determines how effective a map is as a graphic communication tool. You need to select the correct symbology for the data type and, if necessary, select an appropriate generalization. For example, you may be asked to make a simple land cover map. Such data are often nominal in scale (trees, developed, water, etc.) and only require that you pick an appropriate fill pattern or color for each type. By contrast, a map showing population density uses ratio scale data. Such data are usually generalized into a smaller number of categories in which each is symbolized by a different fill or color. Of course, not all features are symbolized using areas. Some are better portrayed by points or lines. Also, different symbolization strategies are used for vector and raster data. The objectives of this tutorial include: 1. Learning to use the symbology window in ArcMap. 2. Selecting and modifying appropriate symbology for different data types. 3. Exploring the different ways in which data are generalized. 4. Creating custom color schemes. 5. Saving layers. NOTE: Before beginning the tutorial, please make sure you “map” the geography server and copy the file named Lab3 to your personal server folder. Lab3 is a Winzip archive that contains the data that are needed for this tutorial and exercise 3. -
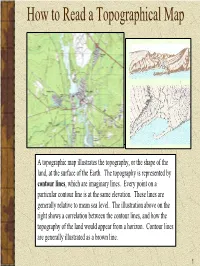
How to Read a Topographical Map
How to Read a Topographical Map A topographic map illustrates the topography, or the shape of the land, at the surface of the Earth. The topography is represented by contour lines, which are imaginary lines. Every point on a particular contour line is at the same elevation. These lines are generally relative to mean sea level. The illustration above on the right shows a correlation between the contour lines, and how the topography of the land would appear from a horizon. Contour lines are generally illustrated as a brown line. 1 How to Read a Topographical Map Individual contour lines on a topographical map are a fixed interval of elevation apart known as a contour interval. Common contour intervals are 5, 10, 20, 40, 80, or 100 feet. The actual contour interval of a map depends upon the topography being represented as well as the scale of the map. If you look at the areas marked with an orange box on this map you will see contour elevation numbers. This is the elevation of the contour line, relative to mean sea level. 2 How to Read a Topographical Map Contour lines that are relatively close together indicate a slope that is fairly steep. Contour lines that are further apart indicates a slope that is relatively flat. The area of the map above boxed in orange shows an area that has a fairly steep slope, while the area boxed in purple is a relatively flat area. 3 How to Read a Topographical Map Contour lines on the map also show how water will travel across the land. -

Application of Digital Elevation Models to Geological and Geomorphological Studies — Some Examples
Przegl¹d Geologiczny, vol. 53, nr 10/2, 2005 Application of digital elevation models to geological and geomorphological studies — some examples Janusz Badura*, Bogus³aw Przybylski* Abstract. Analysis of the Earth’ssurface using three-dimensional models provides a wealth of new interpretation opportunities to geologists and geomorphologists. Linear elements, not visi- ble on classical maps, become distinct features; it is also possible to interpret both small-scale glacial landforms and entire complexes of postglacial landscapes at the regional scale. Geomorphic features are frequently difficult to recognise in the field, either due to their scale or field obstacles. Three-dimensional visualization of the Earth’s surface and its examination at different angles and differently orientated source of light is extremely helpful in geological and geomorphological studies. This tool is, however, relatively seldom used due to either limited access to digital data bases or time-consuming procedures of individual construction of such bases from the existing cartographic data. For instance, analysis of small-scale glacial, fluvial J. Badura B. Przybylski or aeolian landforms in lowland areas requires cartographic data of resolution compatible with 1 : 10,000 scale. Nevertheless, less detailed digital elevation models, constructed at the scale of 1 : 50,000, are also extremely helpful, since they allow for regional interpretations of those morphostructures which are associated not only with neotectonics, but also with ice-flow directions, block disintegration of an ice-sheet, subglacial drainage, stages of fluvial ero- sion, or location of dune belts. A possibility of superposition of geological or geomorphological maps onto 3-D models is equally important, enhancing readability of the maps and providing clues to verification of the origin of landforms and proper cross-cutting relationships drawn on the map.