Topics in Scalar Curvature Spring 2017 Richard M. Schoen Notes By
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Scalar Curvature and Geometrization Conjectures for 3-Manifolds
Comparison Geometry MSRI Publications Volume 30, 1997 Scalar Curvature and Geometrization Conjectures for 3-Manifolds MICHAEL T. ANDERSON Abstract. We first summarize very briefly the topology of 3-manifolds and the approach of Thurston towards their geometrization. After dis- cussing some general properties of curvature functionals on the space of metrics, we formulate and discuss three conjectures that imply Thurston’s Geometrization Conjecture for closed oriented 3-manifolds. The final two sections present evidence for the validity of these conjectures and outline an approach toward their proof. Introduction In the late seventies and early eighties Thurston proved a number of very re- markable results on the existence of geometric structures on 3-manifolds. These results provide strong support for the profound conjecture, formulated by Thur- ston, that every compact 3-manifold admits a canonical decomposition into do- mains, each of which has a canonical geometric structure. For simplicity, we state the conjecture only for closed, oriented 3-manifolds. Geometrization Conjecture [Thurston 1982]. Let M be a closed , oriented, 2 prime 3-manifold. Then there is a finite collection of disjoint, embedded tori Ti 2 in M, such that each component of the complement M r Ti admits a geometric structure, i.e., a complete, locally homogeneous RiemannianS metric. A more detailed description of the conjecture and the terminology will be given in Section 1. A complete Riemannian manifold N is locally homogeneous if the universal cover N˜ is a complete homogenous manifold, that is, if the isometry group Isom N˜ acts transitively on N˜. It follows that N is isometric to N=˜ Γ, where Γ is a discrete subgroup of Isom N˜, which acts freely and properly discontinuously on N˜. -

Geometry of Curves
Appendix A Geometry of Curves “Arc, amplitude, and curvature sustain a similar relation to each other as time, motion and velocity, or as volume, mass and density.” Carl Friedrich Gauss The rest of this lecture notes is about geometry of curves and surfaces in R2 and R3. It will not be covered during lectures in MATH 4033 and is not essential to the course. However, it is recommended for readers who want to acquire workable knowledge on Differential Geometry. A.1. Curvature and Torsion A.1.1. Regular Curves. A curve in the Euclidean space Rn is regarded as a function r(t) from an interval I to Rn. The interval I can be finite, infinite, open, closed n n or half-open. Denote the coordinates of R by (x1, x2, ... , xn), then a curve r(t) in R can be written in coordinate form as: r(t) = (x1(t), x2(t),..., xn(t)). One easy way to make sense of a curve is to regard it as the trajectory of a particle. At any time t, the functions x1(t), x2(t), ... , xn(t) give the coordinates of the particle in n R . Assuming all xi(t), where 1 ≤ i ≤ n, are at least twice differentiable, then the first derivative r0(t) represents the velocity of the particle, its magnitude jr0(t)j is the speed of the particle, and the second derivative r00(t) represents the acceleration of the particle. As a course on Differential Manifolds/Geometry, we will mostly study those curves which are infinitely differentiable (i.e. -

I. Overview of Activities, April, 2005-March, 2006 …
MATHEMATICAL SCIENCES RESEARCH INSTITUTE ANNUAL REPORT FOR 2005-2006 I. Overview of Activities, April, 2005-March, 2006 …......……………………. 2 Innovations ………………………………………………………..... 2 Scientific Highlights …..…………………………………………… 4 MSRI Experiences ….……………………………………………… 6 II. Programs …………………………………………………………………….. 13 III. Workshops ……………………………………………………………………. 17 IV. Postdoctoral Fellows …………………………………………………………. 19 Papers by Postdoctoral Fellows …………………………………… 21 V. Mathematics Education and Awareness …...………………………………. 23 VI. Industrial Participation ...…………………………………………………… 26 VII. Future Programs …………………………………………………………….. 28 VIII. Collaborations ………………………………………………………………… 30 IX. Papers Reported by Members ………………………………………………. 35 X. Appendix - Final Reports ……………………………………………………. 45 Programs Workshops Summer Graduate Workshops MSRI Network Conferences MATHEMATICAL SCIENCES RESEARCH INSTITUTE ANNUAL REPORT FOR 2005-2006 I. Overview of Activities, April, 2005-March, 2006 This annual report covers MSRI projects and activities that have been concluded since the submission of the last report in May, 2005. This includes the Spring, 2005 semester programs, the 2005 summer graduate workshops, the Fall, 2005 programs and the January and February workshops of Spring, 2006. This report does not contain fiscal or demographic data. Those data will be submitted in the Fall, 2006 final report covering the completed fiscal 2006 year, based on audited financial reports. This report begins with a discussion of MSRI innovations undertaken this year, followed by highlights -

NON-EXISTENCE of METRIC on Tn with POSITIVE SCALAR
NON-EXISTENCE OF METRIC ON T n WITH POSITIVE SCALAR CURVATURE CHAO LI Abstract. In this note we present Gromov-Lawson's result on the non-existence of metric on T n with positive scalar curvature. Historical results Scalar curvature is one of the simplest invariants of a Riemannian manifold. In general dimensions, this function (the average of all sectional curvatures at a point) is a weak measure of the local geometry, hence it's suspicious that it has no relation to the global topology of the manifold. In fact, a result of Kazdan-Warner in 1975 states that on a compact manifold of dimension ≥ 3, every smooth function which is negative somewhere, is the scalar curvature of some Riemannian metric. However people know that there are manifolds which carry no metric whose scalar scalar curvature is everywhere positive. The first examples of such manifolds were given in 1962 by Lichnerowicz. It is known that if X is a compact spin manifold and A^ 6= 0 then by Lichnerowicz formula (which will be discussed later) then X doesn't carry any metric with everywhere positive scalar curvature. Note that spin assumption is essential here, since the complex projective plane has positive sectional curvature and non-zero A^-genus. Despite these impressive results, one simple question remained open: Can the torus T n, n ≥ 3, carry a metric of positive scalar curvature? This question was settled for n ≤ 7 by R. Schoen and S. T. Yau. Their method involves the existence of smooth solution of Plateau problem, so the dimension restriction n ≤ 7 is essential. -

Differential Geometry: Curvature and Holonomy Austin Christian
University of Texas at Tyler Scholar Works at UT Tyler Math Theses Math Spring 5-5-2015 Differential Geometry: Curvature and Holonomy Austin Christian Follow this and additional works at: https://scholarworks.uttyler.edu/math_grad Part of the Mathematics Commons Recommended Citation Christian, Austin, "Differential Geometry: Curvature and Holonomy" (2015). Math Theses. Paper 5. http://hdl.handle.net/10950/266 This Thesis is brought to you for free and open access by the Math at Scholar Works at UT Tyler. It has been accepted for inclusion in Math Theses by an authorized administrator of Scholar Works at UT Tyler. For more information, please contact [email protected]. DIFFERENTIAL GEOMETRY: CURVATURE AND HOLONOMY by AUSTIN CHRISTIAN A thesis submitted in partial fulfillment of the requirements for the degree of Master of Science Department of Mathematics David Milan, Ph.D., Committee Chair College of Arts and Sciences The University of Texas at Tyler May 2015 c Copyright by Austin Christian 2015 All rights reserved Acknowledgments There are a number of people that have contributed to this project, whether or not they were aware of their contribution. For taking me on as a student and learning differential geometry with me, I am deeply indebted to my advisor, David Milan. Without himself being a geometer, he has helped me to develop an invaluable intuition for the field, and the freedom he has afforded me to study things that I find interesting has given me ample room to grow. For introducing me to differential geometry in the first place, I owe a great deal of thanks to my undergraduate advisor, Robert Huff; our many fruitful conversations, mathematical and otherwise, con- tinue to affect my approach to mathematics. -

General Relativity Fall 2019 Lecture 11: the Riemann Tensor
General Relativity Fall 2019 Lecture 11: The Riemann tensor Yacine Ali-Ha¨ımoud October 8th 2019 The Riemann tensor quantifies the curvature of spacetime, as we will see in this lecture and the next. RIEMANN TENSOR: BASIC PROPERTIES α γ Definition { Given any vector field V , r[αrβ]V is a tensor field. Let us compute its components in some coordinate system: σ σ λ σ σ λ r[µrν]V = @[µ(rν]V ) − Γ[µν]rλV + Γλ[µrν]V σ σ λ σ λ λ ρ = @[µ(@ν]V + Γν]λV ) + Γλ[µ @ν]V + Γν]ρV 1 = @ Γσ + Γσ Γρ V λ ≡ Rσ V λ; (1) [µ ν]λ ρ[µ ν]λ 2 λµν where all partial derivatives of V µ cancel out after antisymmetrization. σ Since the left-hand side is a tensor field and V is a vector field, we conclude that R λµν is a tensor field as well { this is the tensor division theorem, which I encourage you to think about on your own. You can also check that explicitly from the transformation law of Christoffel symbols. This is the Riemann tensor, which measures the non-commutation of second derivatives of vector fields { remember that second derivatives of scalar fields do commute, by assumption. It is completely determined by the metric, and is linear in its second derivatives. Expression in LICS { In a LICS the Christoffel symbols vanish but not their derivatives. Let us compute the latter: 1 1 @ Γσ = @ gσδ (@ g + @ g − @ g ) = ησδ (@ @ g + @ @ g − @ @ g ) ; (2) µ νλ 2 µ ν λδ λ νδ δ νλ 2 µ ν λδ µ λ νδ µ δ νλ since the first derivatives of the metric components (thus of its inverse as well) vanish in a LICS. -
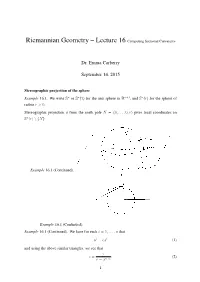
Riemannian Geometry – Lecture 16 Computing Sectional Curvatures
Riemannian Geometry – Lecture 16 Computing Sectional Curvatures Dr. Emma Carberry September 14, 2015 Stereographic projection of the sphere Example 16.1. We write Sn or Sn(1) for the unit sphere in Rn+1, and Sn(r) for the sphere of radius r > 0. Stereographic projection φ from the north pole N = (0;:::; 0; r) gives local coordinates on Sn(r) n fNg Example 16.1 (Continued). Example 16.1 (Continued). Example 16.1 (Continued). We have for each i = 1; : : : ; n that ui = cxi (1) and using the above similar triangles, we see that r c = : (2) r − xn+1 1 Hence stereographic projection φ : Sn n fNg ! Rn is given by rx1 rxn φ(x1; : : : ; xn; xn+1) = ;:::; r − xn+1 r − xn+1 The inverse φ−1 of stereographic projection is given by (exercise) 2r2ui xi = ; i = 1; : : : ; n juj2 + r2 2r3 xn+1 = r − : juj2 + r2 and so we see that stereographic projection is a diffeomorphism. Stereographic projection is conformal Definition 16.2. A local coordinate chart (U; φ) on Riemannian manifold (M; g) is conformal if for any p 2 U and X; Y 2 TpM, 2 gp(X; Y ) = F (p) hdφp(X); dφp(Y )i where F : U ! R is a nowhere vanishing smooth function and on the right-hand side we are using the usual Euclidean inner product. Exercise 16.3. Prove that this is equivalent to: 1. dφp preserving angles, where the angle between X and Y is defined (up to adding multi- ples of 2π) by g(X; Y ) cos θ = pg(X; X)pg(Y; Y ) and also to 2 2. -

Richard Schoen – Mathematics
Rolf Schock Prizes 2017 Photo: Private Photo: Richard Schoen Richard Schoen – Mathematics The Rolf Schock Prize in Mathematics 2017 is awarded to Richard Schoen, University of California, Irvine and Stanford University, USA, “for groundbreaking work in differential geometry and geometric analysis including the proof of the Yamabe conjecture, the positive mass conjecture, and the differentiable sphere theorem”. Richard Schoen holds professorships at University of California, Irvine and Stanford University, and is one of three vice-presidents of the American Mathematical Society. Schoen works in the field of geometric analysis. He is in fact together with Shing-Tung Yau one of the founders of the subject. Geometric analysis can be described as the study of geometry using non-linear partial differential equations. The developments in and around this field has transformed large parts of mathematics in striking ways. Examples include, gauge theory in 4-manifold topology, Floer homology and Gromov-Witten theory, and Ricci-and mean curvature flows. From the very beginning Schoen has produced very strong results in the area. His work is characterized by powerful technical strength and a clear vision of geometric relevance, as demonstrated by him being involved in the early stages of areas that later witnessed breakthroughs. Examples are his work with Uhlenbeck related to gauge theory and his work with Simon and Yau, and with Yau on estimates for minimal surfaces. Schoen has also established a number of well-known and classical results including the following: • The positive mass conjecture in general relativity: the ADM mass, which measures the deviation of the metric tensor from the imposed flat metric at infinity is non-negative. -
On the Structure of Manifolds with Positive Scalar Curvature
manuscripta manuscripta math. 28, 159 - 183 (1979) mathematica by Springef-Verlag 1979 ON THE STRUCTURE OF MANIFOLDS WITH POSITIVE SCALAR CURVATURE R. Schoen and S.T. Yau ~ Dedicated to Hans Lewy and Charles B. Morrey, Jr. In this paper, we study the question of which compact manifolds admit a metric with positive scalar curvature. Scalar curvature is perhaps the weakest invariant among all the well-known invariants constructed from the curvature tensor. It measures the deviation of the Riemannian volume of the geodesic ball from the euclidean volume of the geodesic ball. As a result, it does not tell us much of the behavior of the geodesics in the manifold. Therefore it was remarkable that in 1963, Lichnerowicz [i] was able to prove the theorem that on a compact spin manifold with positive scalar curvature, there is no harmonic spinor. Applying ^ the theorem of Atiyah-Singer, it then follows that the A-genus of the manifold is zero. Later, Hitchin [2] found that the vanish- ing theorem of Lichnerowicz can also be used to prove the other KO-characteristic numbers defined by Milnor [3] are zero. For a while, it was not clear whether these are the only topological obstructions for the existence of metrics with positive scalar curvature. It was not until 1977 that the authors found Research supported in part by NSF MCF 7804872. 0025-2611/79/0028/0159/$05.OO 159 2 SCHOEN-YAU another topological obstruction in connection with some problems in general relativity. (See [4], [5], [6].) At that time, we restricted our attention to three dimensional manifolds. -

SECTIONAL CURVATURE-TYPE CONDITIONS on METRIC SPACES 2 and Poincaré Conditions, and Even the Measure Contraction Property
SECTIONAL CURVATURE-TYPE CONDITIONS ON METRIC SPACES MARTIN KELL Abstract. In the first part Busemann concavity as non-negative curvature is introduced and a bi-Lipschitz splitting theorem is shown. Furthermore, if the Hausdorff measure of a Busemann concave space is non-trivial then the space is doubling and satisfies a Poincaré condition and the measure contraction property. Using a comparison geometry variant for general lower curvature bounds k ∈ R, a Bonnet-Myers theorem can be proven for spaces with lower curvature bound k > 0. In the second part the notion of uniform smoothness known from the theory of Banach spaces is applied to metric spaces. It is shown that Busemann functions are (quasi-)convex. This implies the existence of a weak soul. In the end properties are developed to further dissect the soul. In order to understand the influence of curvature on the geometry of a space it helps to develop a synthetic notion. Via comparison geometry sectional curvature bounds can be obtained by demanding that triangles are thinner or fatter than the corresponding comparison triangles. The two classes are called CAT (κ)- and resp. CBB(κ)-spaces. We refer to the book [BH99] and the forthcoming book [AKP] (see also [BGP92, Ots97]). Note that all those notions imply a Riemannian character of the metric space. In particular, the angle between two geodesics starting at a com- mon point is well-defined. Busemann investigated a weaker notion of non-positive curvature which also applies to normed spaces [Bus55, Section 36]. A similar idea was developed by Pedersen [Ped52] (see also [Bus55, (36.15)]). -

Curriculum Vitae.Pdf
Lan-Hsuan Huang Department of Mathematics Phone: (860) 486-8390 University of Connecticut Fax: (860) 486-4238 Storrs, CT 06269 Email: [email protected] USA http://lhhuang.math.uconn.edu Research Geometric Analysis and General Relativity Employment University of Connecticut Professor 2020-present Associate Professor 2016-2020 Assistant Professor 2012-2016 Institute for Advanced Study Member (with the title of von Neumann fellow) 2018-2019 Columbia University Ritt Assistant Professor 2009-2012 Education Ph.D. Mathematics, Stanford University 2009 Advisor: Professor Richard Schoen B.S. Mathematics, National Taiwan University 2004 Grants • NSF DMS-2005588 (PI, $250,336) 2020-2023 & Honors • von Neumann Fellow, Institute for Advanced Study 2018-2019 • Simons Fellow in Mathematics, Simons Foundation ($122,378) 2018-2019 • NSF CAREER Award (PI, $400,648) 2015-2021 • NSF Grant DMS-1308837 (PI, $282,249) 2013-2016 • NSF Grant DMS-1005560 and DMS-1301645 (PI, $125,645) 2010-2013 Visiting • Erwin Schr¨odingerInternational Institute July 2017 Positions • National Taiwan University Summer 2016 • MSRI Research Member Fall 2013 • Max-Planck Institute for Gravitational Physics, Germany Fall 2010 • Institut Mittag-Leffler, Sweden Fall 2008 1 Journal 1. Equality in the spacetime positive mass theorem (with D. Lee), Commu- Publications nications in Mathematical Physics 376 (2020), no. 3, 2379{2407. 2. Mass rigidity for hyperbolic manifolds (with H. C. Jang and D. Martin), Communications in Mathematical Physics 376 (2020), no. 3, 2329- 2349. 3. Localized deformation for initial data sets with the dominant energy condi- tion (with J. Corvino), Calculus Variations and Partial Differential Equations (2020), no. 1, No. 42. 4. Existence of harmonic maps into CAT(1) spaces (with C. -

Riemannian Submanifolds: a Survey
RIEMANNIAN SUBMANIFOLDS: A SURVEY BANG-YEN CHEN Contents Chapter 1. Introduction .............................. ...................6 Chapter 2. Nash’s embedding theorem and some related results .........9 2.1. Cartan-Janet’s theorem .......................... ...............10 2.2. Nash’s embedding theorem ......................... .............11 2.3. Isometric immersions with the smallest possible codimension . 8 2.4. Isometric immersions with prescribed Gaussian or Gauss-Kronecker curvature .......................................... ..................12 2.5. Isometric immersions with prescribed mean curvature. ...........13 Chapter 3. Fundamental theorems, basic notions and results ...........14 3.1. Fundamental equations ........................... ..............14 3.2. Fundamental theorems ............................ ..............15 3.3. Basic notions ................................... ................16 3.4. A general inequality ............................. ...............17 3.5. Product immersions .............................. .............. 19 3.6. A relationship between k-Ricci tensor and shape operator . 20 3.7. Completeness of curvature surfaces . ..............22 Chapter 4. Rigidity and reduction theorems . ..............24 4.1. Rigidity ....................................... .................24 4.2. A reduction theorem .............................. ..............25 Chapter 5. Minimal submanifolds ....................... ...............26 arXiv:1307.1875v1 [math.DG] 7 Jul 2013 5.1. First and second variational formulas