Honeybee Robotics Agenda
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Curiosity Assesses Conditions Favorable for Life
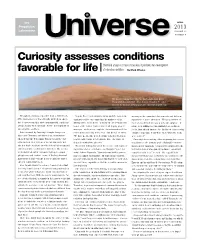
Jet APRIL Propulsion 2013 Laboratory VOLUME 43 NUMBER 4 Curiosity assesses conditions Chemical analysis of rock shows key ingredients for development favorable for life of microbes on Mars By Mark Whalen This mosaic of images from Curiosity’s mast camera shows Mount Sharp, which rises more than 3 miles (5 kilometers) above the crater floor. It is the mission’s primary target after exploring Yellowknife Bay. Through its analysis of powder from a drilled rock, Deputy Project Scientist Joy Crisp said the near-term mentary rocks, abundant clay minerals and different JPL’s Curiosity rover has officially fulfilled its objec- emphasis will be on completing the analyses of the signatures of water alteration. “The gray interior of tive to assess whether past environmental conditions drilling of the rocks in the “John Klein” area—named in the rock we drilled into was a welcome surprise—if at Gale Crater were favorable for the development of honor of the former Mars Science Lab deputy project future rock drilling reveals similarly low oxidation microbial life on Mars. manager—and a more complete characterization of the levels, that should improve the likelihood of preserving Data returned by Curiosity’s Sample Analysis at concretions and veins in the rock. And there’s no hurry. organic compounds if any were there when the rocks Mars and Chemistry and Mineralogy instruments “We have no specific period of time scheduled for how were formed.” showed that the Yellowknife Bay area was the end long we will remain at Yellowknife Bay,” she said. “It Curiosity’s been making other surprising discoveries of an ancient river system or an intermittently wet depends on what we discover.” in addition to the primary goal of habitable environ- lakebed that could have provided chemical energy and The initial drilling has given the science and engineer- ments, noted Vasavada. -

Robotics and Automation for “Icebreaker” B.J
ROBOTICS AND AUTOMATION FOR “ICEBREAKER” B.J. Glass (1), G. Paulsen(2), A. Dave (1), C. McKay(1) (1) NASA Ames Research Center, Moffett Field, CA 94035 USA; Email: [email protected] (2) Honeybee Robotics, Pasadena, CA 91103 USA; Email: [email protected] ABSTRACT components that will penetrate below the ground, and place these inside a biobarrier. To prevent The proposed “Icebreaker” mission is a return to spores from traveling onto the drill auger/bit via the Mars polar latitudes first visited by the Phoenix sample transfer, there must be an air gap between mission in 2007-08. Exploring and interrogating the sterilized drill and a less-sterilized robotic the shallow subsurface of Mars from the surface sample delivery subsystem that could contact the will require some form of excavation and “dirty” spacecraft instruments (which will not be penetration, with drilling being the most mature heat sterilized to Viking standards). approach. A series of 0.5-5m automated rotary and rotary-percussive drills developed over the past Since 2006, NASA has developed a Discovery- decade by NASA Ames and Honeybee Robotics class mission concept, called "Icebreaker" (Fig. 1), provide a capability that could fly on a Mars which is a Lockheed-Martin (Phoenix-derived) surface mission within the next decade. Surface Mars polar lander with life and organics detection robotics have been integrated for sample transfer to instruments and a 1m sampling drill [4]. The deck instruments, and the Icebreaker sample Icebreaker science payload has since 2010 also acquisition system has been tested successfully in been the baseline science payload for developing a Mars chambers and analog field sites to depths joint NASA-commercial Mars astrobiology between 1-3m. -

Flight Opportunities Newsletter July 2020
ISSUE: 34 | July 2020 In this issue: • Recent Flights: Aeroseismometer Technologies Tested on Raven Balloons • Opportunities: New NASA Lunar Tech Funding Opportunity for U.S. Universities; NASA Advances Roadmap Toward Solicitation for Lunar Surface Investigations • News: Watch Jim Reuter’s Webinar for AIAA • Team Spotlight: Meet the Newest Member of Our Technology Team, Gregory Peters • Upcoming Events: Learn About NASA’s New PACE Initiative at the SmallSat Conference Enjoy! The Flight Opportunities team Recent Flights Aeroseismometer Technologies Tested on Recent Balloon Flights Future detection of seismic activity on Venus is the goal of four aeroseismometers—three from Sandia National Laboratory and one from NASA’s Jet Propulsion Laboratory (JPL)—flight tested on balloons from Raven Aerostar earlier this month. The instruments were rigged to Raven’s Cyclone balloon systems, which flew at approximately 20 km altitude and 30 km horizontal range from ground chemical explosions to test seismic detection efficacy. Flight Opportunities supported this Sandia-led aeroseismometer test as part of a Venus balloon-based seismology effort led by JPL. The recent flight tests will help Sandia and JPL scientists advance the state of the art for the use of aeroseismometers for potential future infrasound investigations on Venus as well as other planetary bodies. Such studies could reveal whether these planets exhibit similar seismic shifts to the earthquakes we experience on our home planet, and also may uncover valuable information about their interior structures. In a flight test over Lemitar, Flight Opportunities New Mexico, a balloon Campaign Manager from Raven Aerostar Paul De León provides carries technology remote support from from Sandia National his home office for Laboratory and NASA’s Sandia National Jet Propulsion Laboratory Laboratory and Raven that could be used to aid Aerostar during the seismology studies on aeroseismometer flight Venus and other planets. -
High Temperature Mechanisms M High Temperature Mechanisms a R E Y
S 6 th h o I n r t t e C r o n u a r t i s o e n a o l n P E l a x n t r e e t High Temperature Mechanisms m High Temperature Mechanisms a r e y E P n A Breakthrough Development r o v b i r e o n W m o e r n k t s s h T o p e , c h A n Jerri Ji t l o a l n o t g a Honeybee Robotics Spacecraft Mechanisms Corporation i , e G s e New York, NY o r g i a 0 6 / 2 2 1 0 - 2 0 2 8 Page 1 Overview S • Introduction 6 th h o I n r t t e C • High Temperature Mechanisms r o n u a r t i s o e – High Temperature Switched Reluctance Motor n a o l n P E l – High Temperature Drill a x n t r e e t m – High Temperature Brushless DC Motor & Resolver a r e y E P n r o v b • Summary & Conclusions i r e o n W m o e r n k t s s h T o p e , c h A n t l o a l n o t g a i , e G s e o r g i a 0 6 / 2 2 1 0 - 2 0 2 8 Page 2 Introduction • The extreme high temperature /high pressure environments on S 6 th h o I Venus are unique compare with other NASA Solar System n r t t e C r o exploration mission, environment condition is 460C, 90 bar, 97% n u a r t i s CO2 at the Venus surface, sulphuric acid clouds at 50 km o e n a o l n P • No exist off-the-shelf motors or known R&D prototype motors are E l a x n t r capable of operating under Venus surface conditions for any e e t m a r e appreciable amount of time y E P n r o v • Two types of high temperature motor have been developed by b i r e o n W Honeybee Robotics: m o e r n k t s – HT Switched Reluctance Motor s h T o p e , • Completed Phase I & II study (2.5 years) c h A n t l o a l n • Final prototype was used to actuate a high temperature drill o t g a i , e G – HT DC Brushless Motor and Resolver s e o r • Completed 6 month study (Phase I) g i a • Next generation BLDC motor along with high temperate 0 sample acquisition scoop and high temperature joint are 6 / 2 2 1 0 under development in Phase II study - 2 0 2 8 Page 3 Switched Reluctance Motor • The switched reluctance motor is a direct current, brushless electric S 6 th motor. -
Exploration Technology Group Honeybee Robotics
Exploration Technology Group Honeybee Robotics The Aerospace and Defense Forum San Fernando Valley Chapter Meeting Tuesday, April 17, 2018 Kris Zacny, PhD Vice President [email protected] Honeybee Robotics Spacecraft Mechanisms Corporation 398 W Washington Blvd., Suite 200, Pasadena, CA 91103 www.HoneybeeRobotics.com Honeybee Proprietary Notional concept for discussion purposes – Honeybee Proprietary – Do not distribute History of Honeybee Robotics 2 Notional concept for discussion purposes – Honeybee Proprietary – Do not distribute 1983 Chris Chapman Steve Gorevan The only robotics company in Manhattan! 3 Notional concept for discussion purposes – Honeybee Proprietary – Do not distribute Custom Robotics 4 Notional concept for discussion purposes – Honeybee Proprietary – Do not distribute 2003 MER Rock Abrasion Tool 5 Notional concept for discussion purposes – Honeybee Proprietary – Do not distribute 2003 MER Rock Abrasion Tool 6 Notional concept for discussion purposes – Honeybee Proprietary – Do not distribute 2008 Mars Phoenix and more… Courtesy: NASA 7 2010: Big changes… 2010 Pasadena, CA HQ HQ Acquisition…2017 2013 Manhattan to Brooklyn 2011 Longmont, CO 9 Three from One Advanced Exploration Flight Robotics Technology Systems BROOKLYN, NY PASADENA, CA LONGMONT, CO Geotechnical Automation Inspection, Systems Spacecraft Repair & Motion Assembly Control Systems Systems Common Background Mission Focus ● Team Work ● Rapid Response ● High Reliability Advanced Robotics - Brooklyn 10 Spacecraft Mechanisms - Longmont Optical Encodes -

Department of Business, Economic Development and Tourism
DEPARTMENT OF BUSINESS, ECONOMIC DEVELOPMENT AND TOURISM PACIFIC INTERNATIONAL SPACE CENTER FOR EXPLORATION SYSTEMS DAVID Y. IGE GOVERNOR LUIS P. SALAVERIA DIRECTOR RODRIGO ROMO PROGRAM MANAGER, PISCES FOR IMMEDIATE RELEASE July 18, 2017 PISCES and Honeybee Robotics Receive $119K NASA STTR Grant Award to Fund Phase I of Planetary Building Block Project Using Volcanic Basalt HILO—The Pacific International Space Center for Exploration Systems (PISCES) and Honeybee Robotics, Ltd. have received a $118,690 NASA Small Business Technology Transfer (STTR) grant to jointly develop an In-Situ Resource Utilization (ISRU) technology that could launch the future of space settlement. ISRU takes raw, natively sourced materials and converts them into usable resources. On places like the Moon and Mars, ISRU can transform regolith (or surface soil) into critical necessities like oxygen, water, rocket fuel and construction materials. PISCES and Honeybee Robotics have partnered on the 12-month ISRU project to design and develop an automated construction process that creates building blocks made entirely of sintered Hawaiian basalt. Since Hawaii’s basalt closely resembles Martian and lunar regolith in chemical composition and appearance, the blocks will have applications both on Earth and in space. ISRU basalt materials could enable the construction of habitats, tools, shelters, roads, landing pads and other critical infrastructure required for space settlement. Basalt building blocks could also provide a sustainable new construction material for the State of Hawaii in place of imported cement. Through the STTR grant, PISCES is currently investigating the ideal sintering temperature to create these building blocks with an optimal balance of strength and volume. -

Written Testimony of Stephen Gorevan Chairman and Co-Founder of Honeybee Robotics, Ltd
Written Testimony of Stephen Gorevan Chairman and Co-Founder of Honeybee Robotics, Ltd. The Brooklyn Navy Yard Building 128, Suite 121 63 Flushing Avenue, Unit 150 Brooklyn, NY 11205 Subcommittee on Agriculture, Energy, and Trade House Committee on Small Business “Ready for Liftoff: The Importance of Small Businesses in the NASA Supply Chain” July 12, 2016 Mr. Chairman and Members of the House Subcommittee on Agriculture, Energy, and Trade: Thank you for the opportunity to share our perspective as a small business contractor to NASA. We believe that NASA and small businesses have a strong and mutually beneficial relationship. Organizations such as ours play an important role in creating enabling technologies for NASA while doing our part to keep American innovation the envy of the world. I co-founded Honeybee Robotics in 1983, and my company has worked as a small business contractor to NASA for 30 years. Our headquarters is in New York, and we maintain satellite offices in Longmont, Colorado and Pasadena, California. Our specialty is in building robotic and electromechanical systems that operate reliably in the toughest environments, such as planetary exploration and spacecraft systems. Over the years we have worked with the majority of NASA’s research and space flight centers, winning contracts for pioneering early-stage development as well as flight missions that range from planetary exploration to the Orion spacecraft. We have been fortunate to contribute flight hardware to all the spacecraft that NASA has landed on Mars since 2000, and in the process Honeybee has achieved a succession of firsts on Mars. Our Rock Abrasion Tools on the 2003 Mars Exploration Rovers Spirit and Opportunity were the first tools to access the inside of rocks on Mars. -

ASTRONAUT-DRILLING SIMULATION for SIGNS of LIFE. E. P. Seto1, K
52nd Lunar and Planetary Science Conference 2021 (LPI Contrib. No. 2548) 1738.pdf ASTRONAUT-DRILLING SIMULATION FOR SIGNS OF LIFE. E. P. Seto1, K. Zacny1, M. Musilova2,3,4, 1Honeybee Robotics ([email protected]), 2International Moonbase Alliance, United States ([email protected]), 3Institute of Robotics and Cybernetics, Faculty of Electrical Engineering and Information Technology STU in Bratislava, Slovakia, 4Slovak Organisation for Space Activities (SOSA), Bratislava, Slovakia Introduction: Lava tubes can be found on Earth and Honeybee Robotics has been developing numerous similar structures have been identified on Mars and the geo-related tools for robotic exploration and some have Moon. In lava tubes, microbial processes aid in the been modified and deployed in various planetary analog formation of minerals present from surrounding basaltic field sites. The coring bit is using Honeybee-patented rock [1]. Understanding the distribution of microbial core break off technology that has been selected by life in analog extreme environments can provide critical NASA JPL for its Mars2020 coring drill (first step in the clues for biosignatures and signs of past or present life Mars Sample Return Campaign) [3]. The drill has been that may exist on Mars and Moon. To search for designed specifically for capturing rock cores from molecular biomarkers will require sample acquisition large boulders or rocks, or from rocks too large to be below the desiccated and irradiated surfaces. We transported back to Earth. The system has been adapted simulated an astronaut-drilling mission for signs of life to be used by scientists on Earth and astronauts on the in the lunar subsurface using Honeybee Robotics’ Moon or Mars (Figure 2). -

Commercial Lunar Propellant Architecture a Collaborative Study of Lunar Propellant Production
Commercial Lunar Propellant Architecture A Collaborative Study of Lunar Propellant Production 1 To the Memory of: Dr. Paul D. Spudis (1952–2018) Dr. Spudis earned his master’s degree from Brown University and his Ph.D. from Arizona State University in Geology with a focus on the Moon. His career included work at the US Geological Survey, NASA, John Hopkins University Applied Physics Laboratory, and the Lunar and Planetary Institute advocating for the exploration and the utilization of lunar resources. His work will continue to inspire and guide us all on our journey to the Moon. “By going to the Moon we can learn how to extract what we need in space from what we find in space. Fundamentally that is a skill that any spacefaring civilization has to master. If you can learn to do that, you’ve got a skill that will allow you to go to Mars and beyond.” ii Authors David Kornuta, United Launch Alliance, CisLunar Project Lead1 Angel Abbud-Madrid, Colorado School of Mines, Professor of Space Resources Jared Atkinson, Honeybee Robotics, Senior Geophysical Engineer Jonathan Barr, United Launch Alliance, Program Manager Gary Barnhard, Xtraordinary Innovative Space Partnership, CEO Dallas Bienhoff, Cislunar Space Development Company LLC, Founder Brad Blair, NewSpace Analytics, Managing Partner Vanessa Clark, Atomos Nuclear and Space, Chief Executive and Technology Officer Justin Cyrus, Lunar Outpost, CEO Blair DeWitt, Lunar Station Corporation, CEO and Co-Founder Chris Dreyer, Colorado School of Mines, Professor of Space Resources Barry Finger, Paragon -

In Situ Geochronology for the Next Decade: Mission Designs for the Moon, Mars, and Vesta
In Situ Geochronology for the Next Decade: Mission Designs for the Moon, Mars, and Vesta Barbara A. Cohen, NASA Goddard Space Flight Center, Greenbelt MD Kelsey E. Young, NASA Goddard Space Flight Center, Greenbelt MD Nicolle E. B. Zellner, Albion College, Albion, MI Kris Zacny, Honeybee Robotics, Pasadena CA R. Aileen Yingst, Planetary Science Institute, Tucson AZ Ryan N. Watkins, Planetary Science Institute, Tucson AZ Richard Warwick, Lockheed Martin Engineering, Littleton, CO Sarah N. Valencia, University of Maryland / NASA Goddard Space Flight Center, Greenbelt, MD Timothy D. Swindle, Lunar and Planetary Laboratory, University of Arizona, Tucson AZ Stuart J. Robbins, Southwest Research Institute, Boulder, CO Noah E. Petro, NASA Goddard Space Flight Center, Greenbelt MD Anthony Nicoletti, NASA Goddard Space Flight Center, Greenbelt MD Daniel P. Moriarty, III, University of Maryland / NASA Goddard Space Flight Center, Greenbelt, MD Richard Lynch, NASA Goddard Space Flight Center, Greenbelt MD Stephen J. Indyk, Honeybee Robotics, Pasadena CA Juliane Gross, Rutgers University, Piscataway NJ Jennifer A. Grier, Planetary Science Institute, Tucson AZ John A. Grant, National Air and Space Museum, Smithsonian Institution, Washington, DC Amani Ginyard, NASA Goddard Space Flight Center, Greenbelt MD Caleb I. Fassett, NASA Marshall Space Flight Center, Huntsville, AL Kenneth A. Farley, California Institute of Technology, Pasadena CA Benjamin J. Farcy, University of Maryland, College Park, MD Bethany L. Ehlmann, California Institute of Technology, Pasadena CA M. Darby Dyar, Planetary Science Institute, Tucson AZ Gerard Daelemans, NASA Goddard Space Flight Center, Greenbelt MD Natalie M. Curran, Catholic University of America / NASA Goddard Space Flight Center, Greenbelt, MD Carolyn H. van der Bogert, Institut für Planetologie, Westfälische Wilhelms-Universität, Münster, Germany Ricardo D. -
CURIOSITY and Nasads MISSION to MARS
National Aeronautics and Space Administration CURIOSITY AND NASA’S MISSION TO MARS: A CASE FOR SMALL BUSINESS . Table of Contents 1 U.S. Small Business Administration Congratulatory Letter 3 From the National Aeronautics and Space Administration Administrator 4 Vision and Mission Statements 5 Message to the Nation 6 The Metrics: Small Business Achievements at NASA 8 About the NASA Mars Science Laboratory and Curiosity 12 Honeybee Robotics Spacecraft Mechanisms Corporation 18 Malin Space Science Systems 22 ATA Engineering, Inc. 28 Columbus Technologies and Services, Inc. 32 Santa Barbara Applied Research, Inc. 35 The Terraza Design Group, Inc. 37 Yardney Technical Products, Inc. 40 Small Business Program Contacts 43 Office of Small Business Programs Contact Information TABLE OF CONTENTS III . U.S. Small Business Administration Congratulatory Letter I want to congratulate everyone involved in the historic landing of NASA’s Curiosity rover on Mars. The success of this mission is a testament to American innovation and ingenuity and to our enduring drive to explore new frontiers. As President Obama said, “The successful landing of Curiosity—the most sophisticated roving laboratory ever to land on another planet—marks an unprecedented feat of technology that will stand as a point of national pride far into the future.” From the amazing people at NASA to the private-sector businesses who helped build the innovative technology and components, this truly was a team effort. In particular, I want to recognize the small businesses that were part of this mission. Whether it’s the camera system built by Malin Space Science Systems that showed us the first breathtaking images from the landing or Litespeed Bicycles in Tennessee that helped build Curiosity’s titanium suspension arms, these small businesses not only are making an impact in markets in the U.S., but, as Inc. -

The Phoenix Mars Lander Robotic
The Phoenix Mars Lander Robotic Arm Robert Bonitz, Lori Shiraishi, Matthew Robinson, Joseph Carsten, Richard Volpe, Ashitey Trebi-Ollennu Jet Propulsion Laboratory California Institute of Technology 4800 Oak Grove Drive Pasadena, CA 91109-8099 Robert.G.Bonitz,Lori.R.Shiraishi,Matthew.L.Robinson,Joseph.Carsten,volpe,[email protected] Raymond E. Arvidson Department of Earth and Planetary Sciences Washington University in Saint Louis Saint Louis, MO 63130 [email protected] P. C. Chu, J. J. Wilson, K. R. Davis Honeybee Robotics Spacecraft Mechanisms Corporation 460 W. 34th Street New York, NY 10001 chu,wilson,[email protected] Abstract—The Phoenix Mars Lander Robotic Arm (RA) primary 90-sol (sol = 1 Martian day) mission of scientific has operated for 149 sols since the Lander touched down on exploration in the vicinity of the landing site [10]. Favorable the north polar region of Mars on May 25, 2008. During its conditions permitted extending major operations through mission it has dug numerous trenches in the Martian 149 sols after which limited energy permitted only restricted regolith, acquired samples of Martian dry and icy soil, and operations consisting primarily of collecting weather data. delivered them to the Thermal Evolved Gas Analyzer The RA was an essential system for achieving the scientific (TEGA) and the Microscopy, Electrochemistry, and goals of the Phoenix mission by providing support to the Conductivity Analyzer (MECA). The RA inserted the other science instruments as well as conducting specific soil Thermal and Electrical Conductivity Probe (TECP) into the mechanics experiments [11]. One of the primary mission Martian regolith and positioned it at various heights above goals was to analyze soil samples in the TEGA [1], and the surface for relative humidity measurements.