The Phoenix Mars Lander Robotic
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Mars Exploration - a Story Fifty Years Long Giuseppe Pezzella and Antonio Viviani
Chapter Introductory Chapter: Mars Exploration - A Story Fifty Years Long Giuseppe Pezzella and Antonio Viviani 1. Introduction Mars has been a goal of exploration programs of the most important space agencies all over the world for decades. It is, in fact, the most investigated celestial body of the Solar System. Mars robotic exploration began in the 1960s of the twentieth century by means of several space probes sent by the United States (US) and the Soviet Union (USSR). In the recent past, also European, Japanese, and Indian spacecrafts reached Mars; while other countries, such as China and the United Arab Emirates, aim to send spacecraft toward the red planet in the next future. 1.1 Exploration aims The high number of mission explorations to Mars clearly points out the impor- tance of Mars within the Solar System. Thus, the question is: “Why this great interest in Mars exploration?” The interest in Mars is due to several practical, scientific, and strategic reasons. In the practical sense, Mars is the most accessible planet in the Solar System [1]. It is the second closest planet to Earth, besides Venus, averaging about 360 million kilometers apart between the furthest and closest points in its orbit. Earth and Mars feature great similarities. For instance, both planets rotate on an axis with quite the same rotation velocity and tilt angle. The length of a day on Earth is 24 h, while slightly longer on Mars at 24 h and 37 min. The tilt of Earth axis is 23.5 deg, and Mars tilts slightly more at 25.2 deg [2]. -
Curiosity Assesses Conditions Favorable for Life
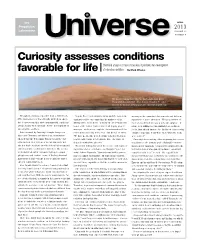
Jet APRIL Propulsion 2013 Laboratory VOLUME 43 NUMBER 4 Curiosity assesses conditions Chemical analysis of rock shows key ingredients for development favorable for life of microbes on Mars By Mark Whalen This mosaic of images from Curiosity’s mast camera shows Mount Sharp, which rises more than 3 miles (5 kilometers) above the crater floor. It is the mission’s primary target after exploring Yellowknife Bay. Through its analysis of powder from a drilled rock, Deputy Project Scientist Joy Crisp said the near-term mentary rocks, abundant clay minerals and different JPL’s Curiosity rover has officially fulfilled its objec- emphasis will be on completing the analyses of the signatures of water alteration. “The gray interior of tive to assess whether past environmental conditions drilling of the rocks in the “John Klein” area—named in the rock we drilled into was a welcome surprise—if at Gale Crater were favorable for the development of honor of the former Mars Science Lab deputy project future rock drilling reveals similarly low oxidation microbial life on Mars. manager—and a more complete characterization of the levels, that should improve the likelihood of preserving Data returned by Curiosity’s Sample Analysis at concretions and veins in the rock. And there’s no hurry. organic compounds if any were there when the rocks Mars and Chemistry and Mineralogy instruments “We have no specific period of time scheduled for how were formed.” showed that the Yellowknife Bay area was the end long we will remain at Yellowknife Bay,” she said. “It Curiosity’s been making other surprising discoveries of an ancient river system or an intermittently wet depends on what we discover.” in addition to the primary goal of habitable environ- lakebed that could have provided chemical energy and The initial drilling has given the science and engineer- ments, noted Vasavada. -

The Evolving Launch Vehicle Market Supply and the Effect on Future NASA Missions
Presented at the 2007 ISPA/SCEA Joint Annual International Conference and Workshop - www.iceaaonline.com The Evolving Launch Vehicle Market Supply and the Effect on Future NASA Missions Presented at the 2007 ISPA/SCEA Joint International Conference & Workshop June 12-15, New Orleans, LA Bob Bitten, Debra Emmons, Claude Freaner 1 Presented at the 2007 ISPA/SCEA Joint Annual International Conference and Workshop - www.iceaaonline.com Abstract • The upcoming retirement of the Delta II family of launch vehicles leaves a performance gap between small expendable launch vehicles, such as the Pegasus and Taurus, and large vehicles, such as the Delta IV and Atlas V families • This performance gap may lead to a variety of progressions including – large satellites that utilize the full capability of the larger launch vehicles, – medium size satellites that would require dual manifesting on the larger vehicles or – smaller satellites missions that would require a large number of smaller launch vehicles • This paper offers some comparative costs of co-manifesting single- instrument missions on a Delta IV/Atlas V, versus placing several instruments on a larger bus and using a Delta IV/Atlas V, as well as considering smaller, single instrument missions launched on a Minotaur or Taurus • This paper presents the results of a parametric study investigating the cost- effectiveness of different alternatives and their effect on future NASA missions that fall into the Small Explorer (SMEX), Medium Explorer (MIDEX), Earth System Science Pathfinder (ESSP), Discovery, -

Robotics and Automation for “Icebreaker” B.J
ROBOTICS AND AUTOMATION FOR “ICEBREAKER” B.J. Glass (1), G. Paulsen(2), A. Dave (1), C. McKay(1) (1) NASA Ames Research Center, Moffett Field, CA 94035 USA; Email: [email protected] (2) Honeybee Robotics, Pasadena, CA 91103 USA; Email: [email protected] ABSTRACT components that will penetrate below the ground, and place these inside a biobarrier. To prevent The proposed “Icebreaker” mission is a return to spores from traveling onto the drill auger/bit via the Mars polar latitudes first visited by the Phoenix sample transfer, there must be an air gap between mission in 2007-08. Exploring and interrogating the sterilized drill and a less-sterilized robotic the shallow subsurface of Mars from the surface sample delivery subsystem that could contact the will require some form of excavation and “dirty” spacecraft instruments (which will not be penetration, with drilling being the most mature heat sterilized to Viking standards). approach. A series of 0.5-5m automated rotary and rotary-percussive drills developed over the past Since 2006, NASA has developed a Discovery- decade by NASA Ames and Honeybee Robotics class mission concept, called "Icebreaker" (Fig. 1), provide a capability that could fly on a Mars which is a Lockheed-Martin (Phoenix-derived) surface mission within the next decade. Surface Mars polar lander with life and organics detection robotics have been integrated for sample transfer to instruments and a 1m sampling drill [4]. The deck instruments, and the Icebreaker sample Icebreaker science payload has since 2010 also acquisition system has been tested successfully in been the baseline science payload for developing a Mars chambers and analog field sites to depths joint NASA-commercial Mars astrobiology between 1-3m. -
Phoenix Descending NASA’S Mars Strategy Goes from “Follow the Water” to “Arrive at the Ice”
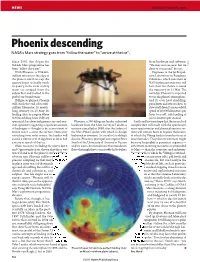
NEWS NATURE|Vol 453|8 May 2008 Phoenix descending NASA’s Mars strategy goes from “follow the water” to “arrive at the ice”. Since 2001, the slogan for from hardware and software. NASA’s Mars programme has “We may not succeed, but we NASA been “follow the water”. deserve to succeed,” he says. With Phoenix, a US$420- Engineers at the Jet Propul- million mission to the edge of sion Laboratory in Pasadena, the planet’s north ice cap, the California, which runs most of agency hopes to finally touch NASA’s planetary missions, will its quarry, in the form of dirty have their last chance to tweak water ice scraped from the the trajectory on 24 May. The subsurface and melted in the next day, Phoenix is expected probe’s on-board ovens. to use the planet’s atmosphere, If all goes as planned, Phoenix and its own heat shielding, will reach the end of its 680- parachutes and retrorockets, to million-kilometre, 10-month- slow itself down from an orbital long journey on 25 May. Its speed of 20,000 kilometres per landing site is in a region where hour to a soft, safe landing at NASA’s orbiting Mars Odyssey just 2.4 metres per second. spacecraft has detected gamma-ray and neu- Phoenix, a 350-kilogram lander, inherited Smith and his team hope that the ice and soil tron signatures suggesting a significant amount hardware from the Mars Surveyor Lander, a samples they will study with the spacecraft’s of hydrogen — thought to be a constituent of mission cancelled in 2000 after the failure of mass-spectrometer and chemical analysis sys- frozen water — near the surface. -
Solar-System-Wide Significance of Mars Polar Science
Solar-System-Wide Significance of Mars Polar Science A White Paper submitted to the Planetary Sciences Decadal Survey 2023-2032 Point of Contact: Isaac B. Smith ([email protected]) Phone: 647-233-3374 York University and Planetary Science Institute 4700 Keele St, Toronto, Ontario, Canada Acknowledgements: A portion of the research was carried out at the Jet Propulsion Laboratory, California Institute of Technology, under a contract with the National Aeronautics and Space Administration (80NM0018D0004). © 2020. All rights reserved. 1 This list includes many of the hundreds of current students and scientists who have made significant contributions to Mars Polar Science in the past decade. Every name listed represents a person who asked to join the white paper or agreed to be listed and provided some comments. Author List: I. B. Smith York University, PSI W. M. Calvin University of Nevada Reno D. E. Smith Massachusetts Institute of Technology C. Hansen Planetary Science Institute S. Diniega Jet Propulsion Laboratory, Caltech A. McEwen Lunar and Planetary Laboratory N. Thomas Universität Bern D. Banfield Cornell University T. N. Titus U.S. Geological Survey P. Becerra Universität Bern M. Kahre NASA Ames Research Center F. Forget Sorbonne Université M. Hecht MIT Haystack Observatory S. Byrne University of Arizona C. S. Hvidberg University of Copenhagen P. O. Hayne University of Colorado LASP J. W. Head III Brown University M. Mellon Cornell University B. Horgan Purdue University J. Mustard Brown University J. W. Holt Lunar and Planetary Laboratory A. Howard Planetary Science Institute D. McCleese Caltech C. Stoker NASA Ames Research Center P. James Space Science Institute N. -
+ Mars Reconnaissance Orbiter Launch Press
NATIONAL AERONAUTICS AND SPACE ADMINISTRATION Mars Reconnaissance Orbiter Launch Press Kit August 2005 Media Contacts Dolores Beasley Policy/Program Management 202/358-1753 Headquarters [email protected] Washington, D.C. Guy Webster Mars Reconnaissance Orbiter Mission 818/354-5011 Jet Propulsion Laboratory, [email protected] Pasadena, Calif. George Diller Launch 321/867-2468 Kennedy Space Center, Fla. [email protected] Joan Underwood Spacecraft & Launch Vehicle 303/971-7398 Lockheed Martin Space Systems [email protected] Denver, Colo. Contents General Release ..................................………………………..........................................…..... 3 Media Services Information ………………………………………..........................................…..... 5 Quick Facts ………………………………………………………................................….………… 6 Mars at a Glance ………………………………………………………..................................………. 7 Where We've Been and Where We're Going ……………………................…………................... 8 Science Investigations ............................................................................................................... 12 Technology Objectives .............................................................................................................. 21 Mission Overview ……………...………………………………………...............................………. 22 Spacecraft ................................................................................................................................. 33 Mars: The Water Trail …………………………………………………………………...............…… -

Flight Opportunities Newsletter July 2020
ISSUE: 34 | July 2020 In this issue: • Recent Flights: Aeroseismometer Technologies Tested on Raven Balloons • Opportunities: New NASA Lunar Tech Funding Opportunity for U.S. Universities; NASA Advances Roadmap Toward Solicitation for Lunar Surface Investigations • News: Watch Jim Reuter’s Webinar for AIAA • Team Spotlight: Meet the Newest Member of Our Technology Team, Gregory Peters • Upcoming Events: Learn About NASA’s New PACE Initiative at the SmallSat Conference Enjoy! The Flight Opportunities team Recent Flights Aeroseismometer Technologies Tested on Recent Balloon Flights Future detection of seismic activity on Venus is the goal of four aeroseismometers—three from Sandia National Laboratory and one from NASA’s Jet Propulsion Laboratory (JPL)—flight tested on balloons from Raven Aerostar earlier this month. The instruments were rigged to Raven’s Cyclone balloon systems, which flew at approximately 20 km altitude and 30 km horizontal range from ground chemical explosions to test seismic detection efficacy. Flight Opportunities supported this Sandia-led aeroseismometer test as part of a Venus balloon-based seismology effort led by JPL. The recent flight tests will help Sandia and JPL scientists advance the state of the art for the use of aeroseismometers for potential future infrasound investigations on Venus as well as other planetary bodies. Such studies could reveal whether these planets exhibit similar seismic shifts to the earthquakes we experience on our home planet, and also may uncover valuable information about their interior structures. In a flight test over Lemitar, Flight Opportunities New Mexico, a balloon Campaign Manager from Raven Aerostar Paul De León provides carries technology remote support from from Sandia National his home office for Laboratory and NASA’s Sandia National Jet Propulsion Laboratory Laboratory and Raven that could be used to aid Aerostar during the seismology studies on aeroseismometer flight Venus and other planets. -
L02: Case Studies: the Mars Program
University of Toronto Department of Computer Science University of Toronto Department of Computer Science Lecture 2: NASA JPL’s Mars Program Examples of Poor Engineering Mission Launch Date Arrival Date Outcome Viking I 20 Aug 1975 Landed 20 Jul 1976 Operated until 1982 Viking II 9 Sept 1975 Landed 3 Sept 1976 Operated until 1980 ➜ “Software Forensics” Case Studies: Mars Pathfinder Mars Observer 25 Sept 1992 Last contact: Contact lost just Mars Climate Observer 22 Aug 1993 before orbit insertion Mars Polar Lander Pathfinder 4 Dec 1996 Landed Operated until 27 Sept Deep Space 2 4 July 1997 1997 Global Surveyor 7 Nov 1996 Orbit attained Still operational ➜ Some conclusions 12 Sept 1997 e.g. Reliable software has very little to do with writing good programs Climate Orbiter 11 Dec 1998 Last contact: Contact lost just 23 Sept 1999 before orbit insertion e.g. Humans make mistakes, but good engineering practice catches them! Polar Lander 3 Jan 1999 Last contact: Contact lost before 3 Dec 1999 descent Deep Space 2 3 Jan 1999 Last contact: No data was ever 3 Dec 1999 retrieved Mars Odyssey 7 Apr 2001 Expected: October 24, 2001 © 2001, Steve Easterbrook 1 © 2001, Steve Easterbrook 2 University of Toronto Department of Computer Science University of Toronto Department of Computer Science Mars Pathfinder Remember these pictures? ➜ Mission Demonstrate new landing techniques parachute and airbags Take pictures Analyze soil samples Demonstrate mobile robot technology Sojourner ➜ Major success on all fronts Returned 2.3 billion bits of information -

Mer Landing.Qxd
NATIONAL AERONAUTICS AND SPACE ADMINISTRATION Mars Exploration Rover Landings Press Kit January 2004 Media Contacts Donald Savage Policy/Program Management 202/358-1547 Headquarters [email protected] Washington, D.C. Guy Webster Mars Exploration Rover Mission 818/354-5011 Jet Propulsion Laboratory, [email protected] Pasadena, Calif. David Brand Science Payload 607/255-3651 Cornell University, [email protected] Ithaca, N.Y. Contents General Release …………………………………………………………..................................…… 3 Media Services Information ……………………………………….........................................…..... 5 Quick Facts ………………………………………………………................................……………… 6 Mars at a Glance ……………………………………………………….................................………. 7 Historical Mars Missions ………………………………………………….....................................… 8 Mars: The Water Trail ………………………………………………………………….................…… 9 Where We've Been and Where We're Going …………………………………................ 14 Science Investigations .............................................................................................................. 17 Landing Sites ............................................................................................................................. 23 Mission Overview ……………...………………………………………..............................………. 28 Spacecraft ................................................................................................................................. 38 Program/Project Management …………………………………………….................................… -
High Temperature Mechanisms M High Temperature Mechanisms a R E Y
S 6 th h o I n r t t e C r o n u a r t i s o e n a o l n P E l a x n t r e e t High Temperature Mechanisms m High Temperature Mechanisms a r e y E P n A Breakthrough Development r o v b i r e o n W m o e r n k t s s h T o p e , c h A n Jerri Ji t l o a l n o t g a Honeybee Robotics Spacecraft Mechanisms Corporation i , e G s e New York, NY o r g i a 0 6 / 2 2 1 0 - 2 0 2 8 Page 1 Overview S • Introduction 6 th h o I n r t t e C • High Temperature Mechanisms r o n u a r t i s o e – High Temperature Switched Reluctance Motor n a o l n P E l – High Temperature Drill a x n t r e e t m – High Temperature Brushless DC Motor & Resolver a r e y E P n r o v b • Summary & Conclusions i r e o n W m o e r n k t s s h T o p e , c h A n t l o a l n o t g a i , e G s e o r g i a 0 6 / 2 2 1 0 - 2 0 2 8 Page 2 Introduction • The extreme high temperature /high pressure environments on S 6 th h o I Venus are unique compare with other NASA Solar System n r t t e C r o exploration mission, environment condition is 460C, 90 bar, 97% n u a r t i s CO2 at the Venus surface, sulphuric acid clouds at 50 km o e n a o l n P • No exist off-the-shelf motors or known R&D prototype motors are E l a x n t r capable of operating under Venus surface conditions for any e e t m a r e appreciable amount of time y E P n r o v • Two types of high temperature motor have been developed by b i r e o n W Honeybee Robotics: m o e r n k t s – HT Switched Reluctance Motor s h T o p e , • Completed Phase I & II study (2.5 years) c h A n t l o a l n • Final prototype was used to actuate a high temperature drill o t g a i , e G – HT DC Brushless Motor and Resolver s e o r • Completed 6 month study (Phase I) g i a • Next generation BLDC motor along with high temperate 0 sample acquisition scoop and high temperature joint are 6 / 2 2 1 0 under development in Phase II study - 2 0 2 8 Page 3 Switched Reluctance Motor • The switched reluctance motor is a direct current, brushless electric S 6 th motor. -
Exploration Technology Group Honeybee Robotics
Exploration Technology Group Honeybee Robotics The Aerospace and Defense Forum San Fernando Valley Chapter Meeting Tuesday, April 17, 2018 Kris Zacny, PhD Vice President [email protected] Honeybee Robotics Spacecraft Mechanisms Corporation 398 W Washington Blvd., Suite 200, Pasadena, CA 91103 www.HoneybeeRobotics.com Honeybee Proprietary Notional concept for discussion purposes – Honeybee Proprietary – Do not distribute History of Honeybee Robotics 2 Notional concept for discussion purposes – Honeybee Proprietary – Do not distribute 1983 Chris Chapman Steve Gorevan The only robotics company in Manhattan! 3 Notional concept for discussion purposes – Honeybee Proprietary – Do not distribute Custom Robotics 4 Notional concept for discussion purposes – Honeybee Proprietary – Do not distribute 2003 MER Rock Abrasion Tool 5 Notional concept for discussion purposes – Honeybee Proprietary – Do not distribute 2003 MER Rock Abrasion Tool 6 Notional concept for discussion purposes – Honeybee Proprietary – Do not distribute 2008 Mars Phoenix and more… Courtesy: NASA 7 2010: Big changes… 2010 Pasadena, CA HQ HQ Acquisition…2017 2013 Manhattan to Brooklyn 2011 Longmont, CO 9 Three from One Advanced Exploration Flight Robotics Technology Systems BROOKLYN, NY PASADENA, CA LONGMONT, CO Geotechnical Automation Inspection, Systems Spacecraft Repair & Motion Assembly Control Systems Systems Common Background Mission Focus ● Team Work ● Rapid Response ● High Reliability Advanced Robotics - Brooklyn 10 Spacecraft Mechanisms - Longmont Optical Encodes